斜装匀速对日驱动的卫星太阳电池阵入射角计算方法
2017-05-09万向成陆晴刘佩东
万向成 陆晴 刘佩东
(上海卫星工程研究所,上海 201109)
斜装匀速对日驱动的卫星太阳电池阵入射角计算方法
万向成 陆晴 刘佩东
(上海卫星工程研究所,上海 201109)
某遥感卫星在轨长期工作时姿态处于斜飞状态,受总体构型布局约束,卫星双翼太阳电池阵相对星体倾斜安装;为降低对姿态稳定度的影响,太阳电池阵在轨采用匀速对日定向驱动的工作方式。针对上述特点,提出了一种太阳电池阵入射角的计算方法,考虑了卫星姿态斜飞、偏航导引、地球J2项摄动、地影影响等因素,采用坐标变换方法,将太阳矢量和太阳电池阵法线矢量转换到同一坐标系下,计算两者方向余弦,进而得到太阳电池阵入射角。选取一年4个典型时间点给出了算例,计算结果与安装在卫星太阳翼上的模拟式太阳敏感器在轨实测结果进行了比较,验证了该计算方法的有效性和精度。
遥感卫星;姿态斜飞;太阳电池阵;斜装;入射角;偏航导引;地影
1 引言
太阳电池阵入射角是卫星太阳电池阵输出功率的决定性影响因素之一,在卫星总体方案设计时,需结合整星负载功率需求、卫星工作模式等,考虑不同季节下太阳电池阵光照入射角条件,开展整星能量平衡设计,进而确定太阳电池阵面积等参数。因此,太阳电池阵入射角计算是卫星总体设计的一项重要工作,对电源系统方案设计和整星能量平衡管理至关重要[1-3]。对卫星太阳光照条件研究的文献较为广泛,文献[4]在地心天球坐标系推导了太阳光线相对于轨道面入射角的求解方法,给出了太阳相对六面体卫星各个面入射角计算方法;文献[5]以我国交会对接工程圆柱体航天器为应用背景,研究了该类倾斜轨道航天器太阳翼光照角建模问题;文献[6]研究了某太阳同步轨道太阳翼光压有效作用面积问题,将卫星体和太阳翼组成的几何体进行投影变换,判断其相互遮挡并采用凸多边形求交算法求取太阳光压有效作用面积,从而计算太阳光压力矩。上述文献主要侧重于太阳矢量与轨道面关系、太阳光压等方面的研究,针对最常见的六面体星体,太阳电池阵一维对日定向驱动的太阳电池阵入射角计算问题的文献较为少见。
随着我国卫星对地观测技术的快速发展,越来越多的对地遥感卫星采用了太阳同步轨道[7-8],由于降交点地方时选取不同,除降/升交点地方时为6:00的晨昏轨道外,其他降交点地方时的卫星太阳翼通常通过轴承和功率传输组件(Bearing and Power Transfer Assembly,BAPTA)安装在星体上,通过太阳电池阵驱动,使太阳电池阵法线跟踪太阳矢量,从而获得最佳的太阳入射角(太阳矢量与太阳电池阵法线的夹角)条件。另一方面,对地遥感卫星对姿态精度特别是姿态稳定度有较高的要求[9],而太阳电池阵的非匀速转动会使卫星的姿态稳定度恶化,进而影响到分辨率指标,甚至不能满足使用要求。显然,如果太阳电池阵采取匀速驱动的方式,则对卫星姿态稳定度的影响会大大降低。
某遥感卫星选用了降交点地方时10:00的太阳同步轨道,有效载荷在轨工作时卫星姿态长期处于斜飞状态,安装的双翼太阳电池阵相对星体斜装,BAPTA采用匀速驱动对日定向工作。根据该卫星的工作特点,本文提出了一种太阳电池阵入射角计算方法,考虑了卫星姿态斜飞、姿态偏航导引、地影及地球J2项引力摄动的影响,基于Matlab软件编制了计算程序并给出了算例,与在轨太阳敏感器实测结果比较,验证了算法精度,对该类六面体构型且太阳电池阵一维对日定向驱动的太阳电池阵入射角计算有一定参考应用价值。
2 数学模型
太阳电池阵入射角θ定义为太阳矢量与太阳电池阵法线的夹角,其计算公式为
(1)
式中:rs为太阳矢量,nf为太阳电池阵法线矢量。
考虑到卫星姿态斜飞,太阳电池阵相对星体斜装,且在轨长期工作时采用匀速对日定向驱动方式,通过将太阳矢量、太阳电池阵法线矢量转换到同一坐标系下,计算二者的方向余弦,进而求出太阳电池阵入射角,为满足工程实际应用需求,算法还需考虑地影、轨道J2项摄动、姿态斜飞及偏航导引等方面的特殊需求,主要计算步骤如下。
(2)计算太阳矢量在地心(第一)赤道坐标系中的赤经、赤纬;
(3)考虑J2项地球摄动的影响,计算卫星瞬时轨道根数;
(4)通过坐标变换,将太阳矢量转换到卫星轨道坐标系;
(5)考虑姿态斜飞、太阳电池阵斜装角度及太阳电池阵对日定向驱动转动角度,通过坐标转换,将太阳矢量转换至太阳电池阵固连坐标系,在此坐标系下求解太阳矢量和太阳电池阵法线坐标二者之间的方向余弦,即可得到太阳电池阵太阳角;
(6)计算过程中,利用卫星位置矢量和太阳矢量的关系,计算卫星进入地影的时间;
(7)太阳电池阵快速转动(转速为轨道角速度的10倍)捕获到太阳后,以负轨道角速度匀速驱动太阳电池阵法线跟踪太阳矢量,其中卫星在地影区太阳电池阵驱动方式与阳照区相同。
太阳电池阵太阳角计算模型包括太阳矢量计算、卫星瞬时根数计算、偏航导引模块、卫星地影区时间计算等几个主要模块,详述如下。
2.1 坐标系定义及坐标转换
本文用到的坐标系有地心(第一)赤道坐标系、卫星轨道坐标系[10],其定义见图1,其中N为轨道节点,Ω为卫星升交点赤经,u为卫星的纬度幅角。卫星本体固连坐标系、卫星本体三轴坐标系、太阳电池阵固连坐标系等定义如图2所示。
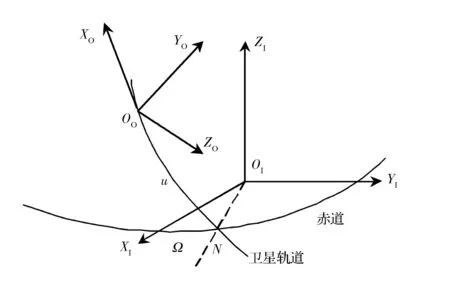
图1 惯性坐标系及轨道坐标系Fig.1 Coordinate define of initial and orbit
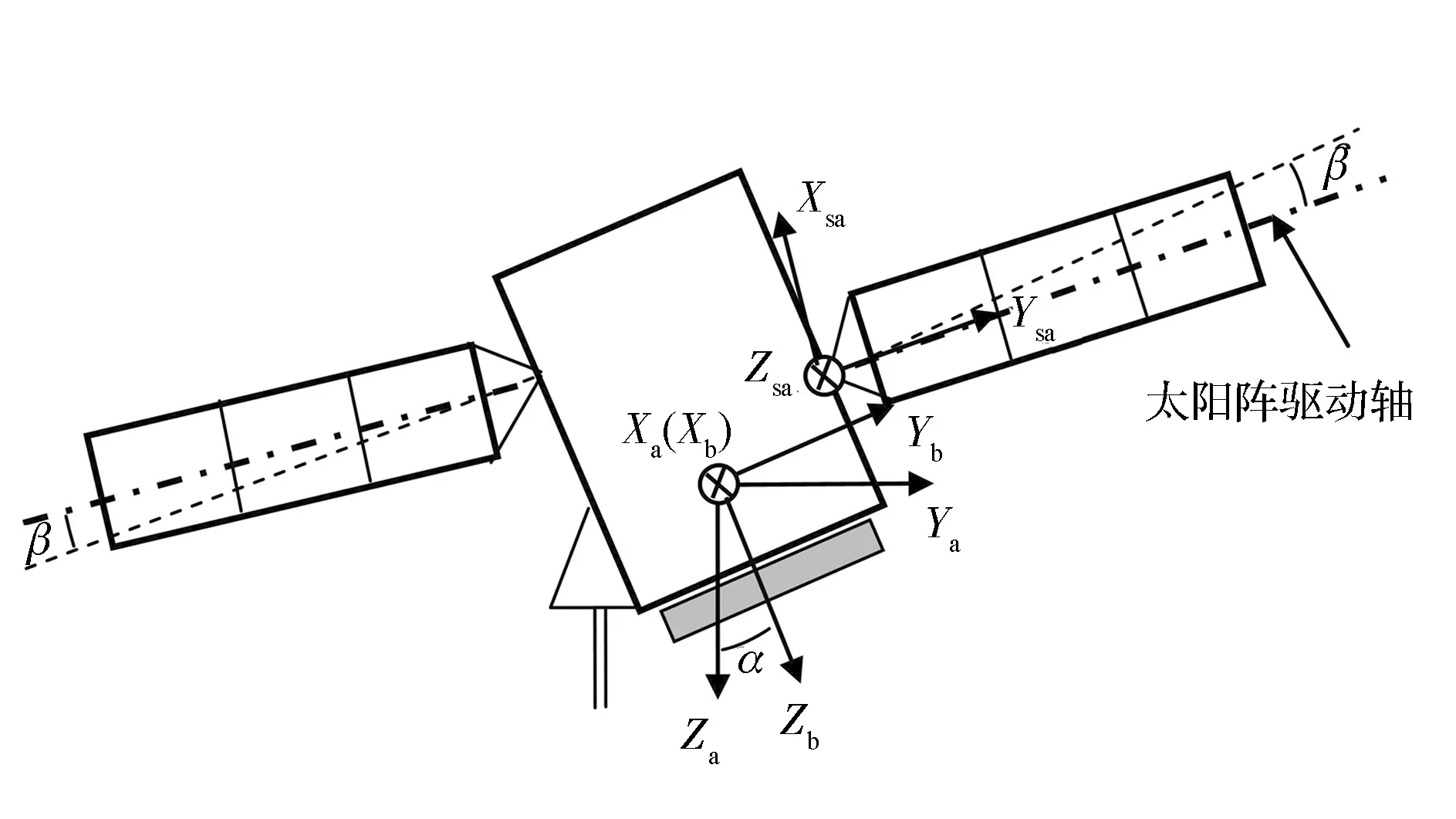
图2 卫星本体坐标系及太阳电池阵局部坐标系Fig.2 Coordinate of satellite body and solar array
(1)地心赤道惯性系OIXIYIZI:原点在地心,OIXI在赤道面内指向平春分点,OIZI轴垂直于赤道面,与地球自转角速度矢量一致,OIYI满足右手法则。
(2)卫星轨道坐标系OX0Y0Z0:原点位于卫星质心处,OZ0指向地心,OX0在轨道平面内垂直于OZ0指向卫星飞行方向,OY0按右手法则。
(3)卫星本体固连坐标系OXbYbZb:原点位于卫星质心处,OZb垂直于星箭对接面指向载荷舱,OYb垂直指向卫星+Y侧板,OXb按右手法则。在不考虑偏航的情况下,从卫星轨道坐标系转动α角,则与本体固连坐标系重合。
(4)卫星本体三轴坐标系OXaYaZa:将坐标系OXbYbZb绕OXb轴旋转α角即得到OXaYaZa坐标系(α为卫星姿态斜飞的角度),此坐标系为卫星姿态控制本体坐标系。
(5)太阳电池阵固连坐标系OXsaYsaZsa:原点位于太阳电池阵与BAPTA的对接法兰面的中心处,OZsa恒指向太阳电池阵贴片面外法线方向,OYsa为太阳电池阵驱动轴,与卫星本体OYb的夹角为β角(太阳电池阵斜装角度),OXsa按右手法则确定,此坐标系与太阳电池阵固连,并随太阳电池阵的转动而转动。
2.2 太阳电池阵构型布局及卫星飞行姿态
受星上敏感器、天线等构型布局的约束,太阳电池阵展开后,太阳电池阵纵轴(驱动轴)相对星体为倾斜状态,即-Y侧太阳翼与-Yb轴呈β角安装,+Y侧太阳翼的驱动轴则与-Y侧平行,如图2所示,如此则卫星的两侧太阳翼相对于星体处于斜装状态。由于有效载荷工作需要,卫星正常飞行时为斜飞状态,设侧视角为α,在不考虑偏航导引,卫星姿态无偏差的情况下,OXaYaZa坐标系与OX0Y0Z0坐标系对应轴平行。
2.3 坐标转换关系
地心(第一)赤道惯性坐标系到卫星轨道坐标系坐标转换矩阵参考文献[10],此处不赘述。太阳电池阵固连坐标系向轨道坐标系经过Y,X,Z三次坐标旋转[11],即
(2)
其中:
(3)
(4)

(5)
以上各式中,Rk(k=X,Y,Z)表示绕k轴的坐标转换矩阵;φ0为太阳电池阵相对星体初始转动角度;ω0为卫星轨道角速度;n为计算的步数;ΔT为计算步长;(-A·cosu)为卫星偏航导引规律,A为偏航角导引幅值,详见2.6节所述。
2.4 太阳矢量的计算
计算太阳在惯性坐标系中位置,参见文献[12],可得太阳在地心(第一)赤道惯性坐标系中的坐标为
(6)
式中:αs为太阳赤经;δs为太阳赤纬。
2.5 瞬时轨道根数计算
考虑轨道J2项一阶短周期摄动,计算瞬时轨道根数,过程为
(7)
(8)

(9)
(10)

(11)
(12)


(13)
轨道短周期摄动项为
(14)
计算tm+1的瞬时根数为
(15)

2.6 偏航导引
由于有效载荷工作的需要,该卫星需要进行偏航导引控制,即卫星偏航角按照一定的跟踪规律而变化,卫星升轨过赤道时,A取3.9°,则偏航导引规律[13-15]为
(16)
2.7 地影模型
卫星进入地影,太阳电池阵驱动仍以轨道角速度驱动,但太阳电池阵入射角需考虑地影部分的影响。本文采用“柱形”地影模型[16],如图3所示,则卫星在地影的条件为
(17)
式中:r为卫星的地心距;ψ为太阳矢量与卫星地心矢量夹角。如判断出卫星在地影中,则在计算结果中,入射角显示置为0。

图3 “柱形”地影模型Fig.3 Shadow model of cylinder
3 软件流程及软件实现
太阳电池阵太阳入射角计算的软件流程如图4所示。

图4 太阳电池阵入射角计算软件流程图Fig.4 Flow diagram of solar array incident angle
4 算例及计算结果精度分析
4.1 算例
算例输入参数为:轨道半长轴6 892.5 km,偏心率0.001,轨道倾角97.73°,近地点幅角90.52°,升交点赤经69.58°,平近点角180.20°,斜飞角度31°,太阳电池阵斜装角度17°,计算步长取10 s,考虑姿态偏航导引,分别以春分、夏至、秋分、冬至四个典型特征点为例,计算卫星飞行一圈的太阳电池阵法向与太阳光矢量的夹角及阴影时间,计算结果见表1,图5~图8为太阳电池阵太阳入射角曲线,图中显示为零的部分为表示卫星在地影区,对光照角置为0°。
根据上述太阳电池阵入射角计算结果,电池片采用砷化镓/锗(GaAs/Ge),太阳吸收率取0.9,损失因子取0.91,表2给出了设计的太阳电池阵输出功率[2],其中寿命初期太阳电池阵输出功率按照其入射角最好情况,寿命末期太阳电池阵输出功率按照其最差入射角考虑,结果表明,太阳电池阵输出功率设计结果满足总体提出的整星功耗需求,整星能量平衡可以满足总体要求。
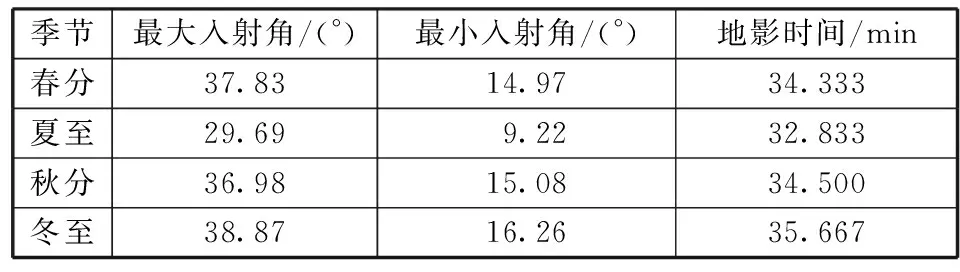
表1 太阳电池阵入射角及地影时间

图5 入射角(春分)Fig.5 Solar array incident angle(Spring Equinox)
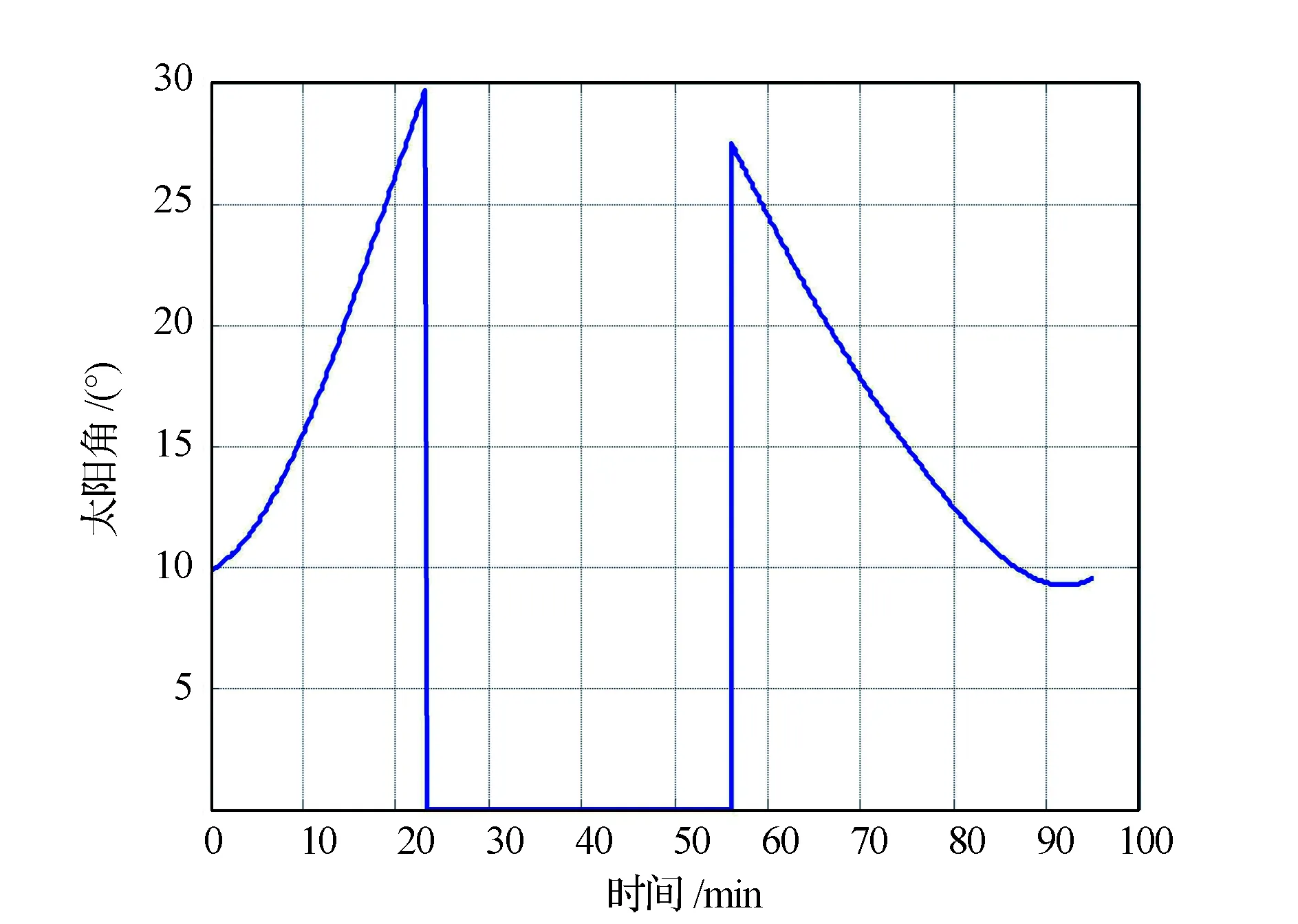
图6 入射角(夏至)Fig.6 Solar array incident angle(Summer Solstice)

图7 入射角(秋分)Fig.7 Solar array incident angle(Autumnal Equinox)
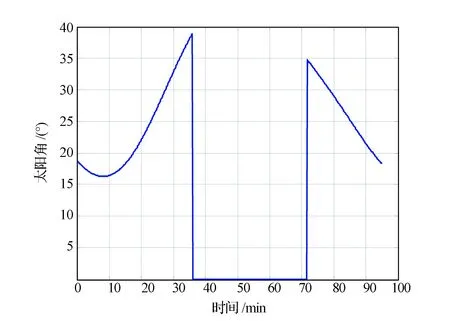
图8 入射角(冬至)Fig.8 Solar array incident angle(Winter Solstice)

名称寿命初期寿命末期电压/V电流/A功率/W电压/V电流/A功率/W平台电池阵36.044.3159536.036.51314载荷电池阵44.011.751544.09.6422
4.2 与模拟式太阳敏感器在轨实际遥测结果比较
为进一步验证太阳电池阵入射角计算精度,计算结果与卫星入轨后实测结果进行了比较。以春分点附近为例,图9为根据安装在太阳电池阵上的模拟式太阳敏感器在轨阳照区实际遥测输出计算得到的太阳电池阵入射角,与图4中按照本文方法计算得到的结果进行比较,太阳角最大值误差不超过2.0°,太阳角最小值误差不超过0.61°,可见其一致性较好。需要说明的是,由于受延时遥测采样周期的影响,图8中太阳敏感器数据采样周期较长,同时,模拟式太阳敏感器测量的太阳入射角本身有一定误差,综合以上因素考虑,该计算方法的计算精度优于2°,可满足工程实际需要。

图9 太阳电池阵入射角遥测值Fig.9 Solar array incident angle obtained by telemetry
5 结束语
本文针对某遥感卫星双翼太阳电池阵斜装、驱动机构匀速对日定向驱动情况下的太阳电池阵入射角计算方法进行了研究,利用坐标变换的方法,将太阳矢量和太阳翼法线矢量转换到轨道坐标系下,编制了计算软件,轨道运动考虑J2项,并考虑了地影、偏航导引等模块,计算结果与在轨遥测数据的一致性进行了比较,结果表明,计算精度不大于2°,验证了计算模型的正确性。该计算方法已应用于卫星工程研制的太阳电池阵输出功率设计和整星能量平衡设计,对类似布局的卫星有较好的借鉴意义。
)
[1] 章仁为. 卫星姿态动力学与控制[M]. 北京:北京航空航天大学出版社,1998
ZhangRenwei.Satelliteorbitattitudedynamicsandcontrol[M].Beijing:BeijingUniversityofAeronauticsandAstronauticPress,1998 (inChinese)
[2]马世俊. 卫星电源技术[M]. 北京:中国宇航出版社,2001
MaShijun.Satelliteelectricalpowertechnology[M].Beijing:ChinaAstronauticsPress,2001 (inChinese)
[3]彭梅,王巍巍,吴静,等. 太阳同步轨道卫星太阳电池阵衰减因子研究[J]. 航天器工程,2011,20(5):61-67
PengMei,WangWeiwei,WuJing,etal.StudyonattenuationfactorofSisolararrayforsatelliteinsunsynchronousorbit[J].SpacecraftEngineering,2011,20(5):61-67(inChinese)
[4]王永谦,太阳同步轨道的太阳相对于轨道面入射角的计算方法[J]. 航天器工程,1995,4(4):65-73
WangYongqian.Thecomputationmethodsofsunincidentangletoorbitplaneofsunsynchronousorbit[J].SpacecraftEngineering,1995,4(4):65-73 (inChinese)
[5]陈忠贵,张志,廖瑛. 航天器太阳翼在轨光照角度建模及仿真分析[J]. 航天器工程,2012,21(1):37-42
ChenZhonggui,ZhangZhi,LiaoYing.Modelingandsimulationanalysisofsolarilluminationangleonspacecraftsolarwingin-orbit[J].SpacecraftEngineering,2012,21(1):37-42(inChinese)
[6]刘暾,赵志萍. 卫星太阳光压力矩计算中有效作用面积的计算[J]. 南京理工大学学报,2007,31(6):684-688
LiuTun,ZhaoZhiping.Methodtocalculateeffectiveareausedincomputationofsolarradiationtorqueofsatellite[J].JournalofNanjingUniversityofScienceandTechnology,2007,31(6):684-688(inChinese)
[7]杨维廉. 资源一号卫星轨道:理论与实践[J]. 航天器工程,2001,10(1):30-43
YangWeilian.TheorbitofZiYuan-1satellite:theoryandpractice[J].SpacecraftEngineering,2001,10(1):30-43 (inChinese)
[8]万向成,魏春,陈筠力. 基于倾角修正的太阳同步轨道降交点地方时主动控制及应用[J]. 上海航天,2016,2(33):63-67
WanXiangcheng,WeiChun,ChenJunli.Localtimeofdescendingnodeactivecontrolmethodsandimplementofsun-synchronousorbitbasedonorbitinclinationmodify[J].AerospaceShanghai,2016,2(33):63-67 (inChinese)
[9]陈杰,周荫清,李春升. 合成孔径雷达卫星姿态指向稳定度与图像质量关系的研究[J]. 电子学报,2001,12(A): 1785-1789
ChenJie,ZhouYinqing,LiChunsheng.OntherelationshipbetweensatelliteattitudestabilityandspaceborneSARimagingqualities[J].ChineseJournalofElectronics,2001,12(A):1785-1789 (inChinese)
[10] 中国人民解放军总装备部.GJB1028-90 卫星坐标系[S]. 北京:总装备部军标出版发行部,1990
GeneralArmamentDepartmentoftheChinesePeople’sLiberationArmy.GJB1028-90Satellitecoordinatesystem[S].Beijing:ArmyStandardsPressofGeneralArmamentDepartment,1990 (inChinese)
[11]刘暾,赵钧. 空间飞行器动力学[M]. 哈尔滨:哈尔滨工业大学出版社,2003
LiuTun,ZhaoJun.Spacecraftdynamics[M].Haerbin:HaerbinInstituteofTechnologyPress,2003 (inChinese)
[12]杨嘉墀. 航天器轨道动力学与控制[M]. 北京:中国宇航出版社,1995
YangJiachi.Orbitdynamicsandcontrolofspacecraft[M].Beijing:ChinaAstronauticsPress,1995 (inChinese)
[13]RaneyRK.Dopplerpropertiesofradarincircularorbits[J].InternationalJournalofRemoteSensing,1986(7):1153-1162
[14]RungeH.BenefitsofantennayawsteeringforSAR[C]//Proc.ofIGARSS’91.NewYork:IEEE,1991: 257-261
[15]李连军,戴金海. 小SAR卫星偏航导引控制[J]. 上海航天,2004(6)10-14
LiLianjun,DaiJinhai.StudyontheyawsteeringcontrolforasmallSARsatellite[J].AerospaceShanghai,2004(6):10-14 (inChinese)
[16]李济生. 航天器轨道确定[M]. 北京:国防工业出版社,2003
LiJisheng.Orbitdeterminationofspacecraft[M].Beijing:DefenseIndustryPress,2003 (inChinese)
(编辑:张小琳)
Method for Calculating Sunlight Incident Angle of Solar Array Slanted Mounted and Driving with Uniformly Angular Velocity
WAN Xiangcheng LU Qing LIU Peidong
(Shanghai Institute of Satellite Engineering Shanghai 201109,China)
A remote satellite which attitude are biased in long time operation,and constrainted by the general configuration,the double solarry array mounted slanted to the satellite body coordinate,meanwhile,in order to depress the influence to attitude stability,the solar array was drived toward Sun vector with the uniformly angular velocity.Aim to those feature,the method to calculate solar array panel incident angle is presentated in this paper.It has considered the attitude offset,yaw steering,J2pertubation of earth and the effect of earth shadow,applying the transform of corordinate,the sun vector and the normal line of solar array are transformed in the same coordinate,calculated the orientation cosine number of value,accordingly,obtained the solar array sunlight incident angle.The four special point being selected,the calculate example is given,compare to the telemetry data obtained by coarse sun sensor on-orbital,the result indicate that they are well consistent.
remote satellite;attitude offset;solar array panel;slanted mounting;sunlight incident angle;yaw steering;earth eclipse
2016-04-12;
2017-03-31
万向成,男,高级工程师,从事卫星总体及卫星动力学与控制技术研究。Email:winux2k@163.com。
V448
A
10.3969/j.issn.1673-8748.2017.02.006