基于LabVIEW的风力机最大功率点跟踪仿真研究
2017-05-08李超苏禹张恩林显富��
李超+苏禹 张恩+林显富��

摘要:基于风力机的发电效率因环境风速变化而改变,本文选用LabVIEW为仿真平台建立风力机最大功率点的追踪系统。首先根据风力机的风能捕获输出功率公式,在LabVIEW平台上搭建了风力机系统模块、风力机控制模块、风轮转速调节模块、风速变化判断模块等。为了弥补传统扰动法存在的追踪精度等问题,利用变步长的扰动观测法对输出功率进行最大功率点追踪,使风力机的输出功率保持在最大输出功率。实验结果表明该系统在不同的仿真风速环境下,能有效的追踪风力机最大输出功率点。
关键词:风力机;LabVIEW;变步长扰动观测法
中图分类号:TK89文献标识码:ADOI:10.3969/j.issn.10036199.2017.01.006
1引言
随着我国经济的迅速发展,能源需求也在不断提高,我国已是能源消费大国之一[1]。面对日趋紧张的局势,可持续发展的理念已得到大家的共识,越来越多的国家将注意力放在了新能源的研究与开发上。
我国地域辽阔,海岸线3.2万公里,风能资源十分丰富,而且风力发电日益受到世界各国的青睐,成本也越来越低。据欧洲风能协会预测,风力发电成本将会继续降低,到2020年,有望达到3美元/度[2]。综上所述,为了最大限度的利用风能,需对其最大功率点进行追踪,使其可以保持在最大功率点输出。
常见的风力发电机最大功率点跟踪控制算法主要有最佳叶尖速比法[3][4]、功率信号反馈法[5][6]和扰动观察法[7][8]等。最佳叶尖速比法控制原理简单,需要预先知道风机的最佳叶尖速比λ,同时还需要安装测速仪对风速和风机转速进行测量,这增加了系统成本,也降低了系统的可靠性;功率信号反馈法控制原理简单,风力机输出功率的波动也相对较小,由于需要测量风机转速和预先准确地测得风力机的最大功率曲线,这就影响了控制精度,增加了成本;传统扰动法不需要测量风速及风机转速,也不需要预先测得风力机的最大功率曲线,但步长的选择是一大难点,当步长较大时最大功率跟踪速度快,但在最大功率点附近会出现较大的功率振荡;步长较小时,最大功率点附近的功率振荡会显著减弱,但系统对外界环境变化的响应能力会变差。为了弥补以上问题,使用改进的扰动法对风力机的最大功率点进行追踪。
LabVIEW具有良好的人机交互界面、计算机图形化显示可以让研究人员更清楚的看出风力机的最大功率点进行追踪的实时情况,而其本身是图形化编程语言,且提供各种接口总线和常用仪器的驱动程序,用户可将其与测量硬件连接,方便地完成信号数据采集、信号分析、数据存储以及数据处理等许多通常的任務。本文基于LabVIEW仿真平台对风力机最大功率点进行追踪。
2风力机最大输出功率追踪设计的原理
3稳定输出最大功率的控制策略
4LabVIEW仿真设计
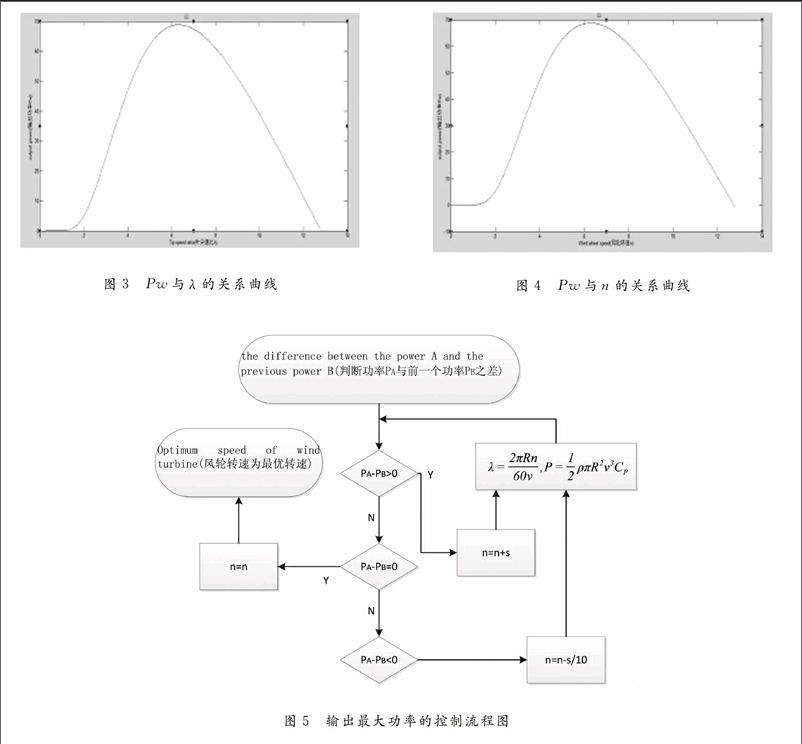
系统采用模块化设计思想,即将风力机的各部分控制模块设计成子VI。该风力机系统主要包括求取利用系数Cp模块、风速变化判断模块、风轮转速调节模块、求取输出功率模块等。根据控制流程图图5,在LabVIEW软件中,将各个模块编程后进行整合,实现系统的总体设计,并选用条件循环结构作为总体结构,程序框图如图6所示:
4.1风速变化判断模块
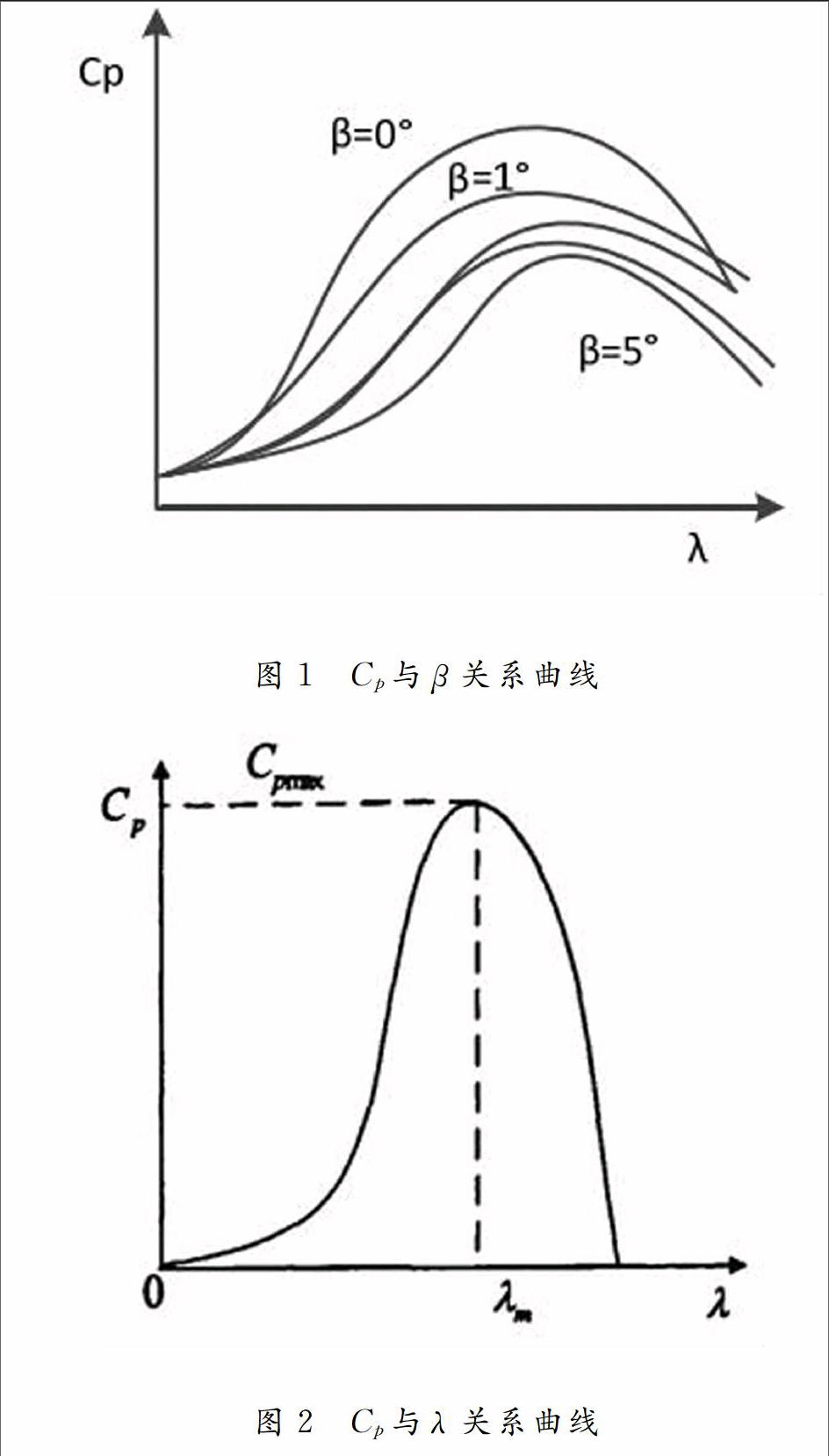
根据公式(5)可知,叶尖速比与风速成反比,因此风能利用系数Cp是变化的。所以,对于风速的变化,也需进行考虑。
风速变化情况的判断:对风速进行实时采集,并作为一个输入变量,并与上次的风速变量进行运算比较,由差值来判断风速变化情况,进而对风速变量进行调整,并决定是否把触发信号传送给风轮转速调节模型子VI,为了防止风速突变而引起的输出功率突变,在程序块中额外添加调整风速变量,使系统更趋于稳定。系统中风速变化为每秒增加0.05 m/s,而且还有10 ms的等待时间,因此系统可得到很好的缓冲。其程序框图如图7所示: 4.2风轮转速调节模块
观察曲线图三与图四后,决定采用扰动观测法,但是传统扰动法步长是固定的,当步长较大时最大功率跟踪速度快,但在最大功率点附近会出现较大的功率振荡,从而无法做到对最大功率点的跟踪;步长较小时,最大功率点附近的功率振荡会显著减弱,但系统对外界环境变化的响应能力会变
4.3风力机系统前面板
风力机系统模型主要实现参数修改及波形监控的功能,建立一个的虚拟风力机模型,风力机系统主界面主要通过按钮开关启动,开关启动后,风机半径及风速的数据传送给风力机控制模块,最后计算出功率,并给出了数值显示模块及波形图。
5结果与分析
图9中,AB段为在风机半径为0.8 m,风速为7 m/s的情况下,风机开始启动到最大功率点的过程,其中曲线1为加入了改进扰动法的风力机输出功率曲线;曲线2为无控制算法的风力机系统仿真曲线;曲线3为加入了传统扰动法的风力机输出功率曲线;BC段为风速上升到8 m/s时的仿真曲线,从图中可看出,无控制算法的风力机在风速变化的情况下会突变,这对于硬件寿命及电路安全都是有很大影响的,而加入了控制算法的风力机曲线缓慢上升,系统得到了缓冲,减小了功率突变;CD段为风速下降回7 m/s时的仿真曲线,无控制算法的风力机由于风轮转速过大,已经有下降的趋势,当风速降低时,发生了突降,然后风轮转速继续上升,输出功率下降;加入了控制算法的风力机根据风速变化缓慢变化,且能够保持着最大功率输出,但是从BD这一过程可以看出,使用传统扰动法的曲线3存在着明显的振荡,而运用改进扰动法的曲线1稳定地输出功率,而且输出功率的波动有减轻,在输出功率显示框中可看出当到达最大输出功率时,数值相对稳定。仿真结果显示改进扰动法对风力机最大功率点追踪是稳定有效的。
参考文献
[1]马川.我国能源利用的现状及对策[J].国土资源导刊,2007,(1):40-41.
[2]郑晓菁,风力发电节能技术的状况分析[J].中国西部科技,2010,(2):42-43.
[3]程启明,程尹曼,汪明媚,等.风力发电系统中最大功率点跟踪方法的综述[J].华东电力,2010,(9):1393-1399.
[4]李咸善,徐浩,杜于龙.采用叶尖速比法和爬山搜索法相结合的风力发电系统最大功率点跟踪研究[J].电力系统保护与控制,2015,(13):66-71.
[5]肖玉华.离网型风光互补发电系统的研究与设计[D].武汉理工大学,2010,(5).
[6]周兴伟,周波,郭鸿浩,等.电励磁双凸极风力发电机系统MPPT控制策略的对比[J].电源学报,2014,(11):48-52.
[7]夏安俊.风力发电机组最大功率点跟踪控制系统的研究[D].无锡:江南大学,2008.
[8]倪雨,郝帅翔.扰动观测法控制MPPT系统运动特性分析[J].电子学报,2015,(7):1388-1394.
[9]宋海辉.风力发电技术及工程[M].北京:水利水电出版社,2009.
[10]于群,曹娜.MATLAB/Simulink电力系统建模与仿真[M].北京:机械工业出版社,2011.
