基于安卓手机蓝牙控制的智能小车设计
2017-04-27作者王海何仕骞绵阳职业技术学院信息工程系
作者/王海、何仕骞,绵阳职业技术学院 信息工程系
基于安卓手机蓝牙控制的智能小车设计
作者/王海、何仕骞,绵阳职业技术学院 信息工程系
基于智能手机平台,借助蓝牙通信技术设计一款智能小车。设计中将蓝牙、单片机技术和智能移动终端平台结合,设计小车通过蓝牙实现对小车的前进、后退、右转弯、左转弯、 倒车等功能的控制。实验测试表明,设计实现手机蓝牙控制小车的智能行驶,这为车载电子的无线通信设计提供了一种新的设计方法,也为汽车无线远程控制的设计提供一定的参考价值。
蓝牙通信;移动智能终端;汽车电子
引言
智能小车的设计的思路是基于以下几个方面:随着汽车电子技术的发展,汽车配备的电子设备越来越多,使得车载电子系统对整个车的影响非常大; 其次, 汽车车载蓝牙技术得到普及,同时智能手机逐渐普及,移动智能终端设备给人们的生活带来极大的便利。因此目前国内、外很多汽车整车厂、汽车电子公司都致力于开发基于智能手机的全景泊车系统、胎压检测系统、蓝牙OBD等汽车电子系统,通过车载蓝牙连接智能终端,可实时让驾驶员了解车身周围的信息,监控汽车的行驶状态、查询汽车的故障信息,通过无线网络连接给汽车驾驶员日常驾驶和日常维护带来了很大的便利[1]。
1. 总体设计方案
本设计的研究内容包括小车的制作、控制系统的软件和硬件设计、蓝牙通信协议调试,安卓手机 APP设计[2],总体设计框图如图1所示。本次设计小车主要实现功能包括:
(1)可通过手机操作界面实现小车的前进、后退、右转弯、左转弯、倒车等功能;
(2)设置当小车运动至超出蓝牙控制范围时,小车自动停止运动;
(3)设置当小车前方有障碍物时右转向,实现小车避障功能。
2. 硬件设计
■2.1 单片机最小系统及外围电路
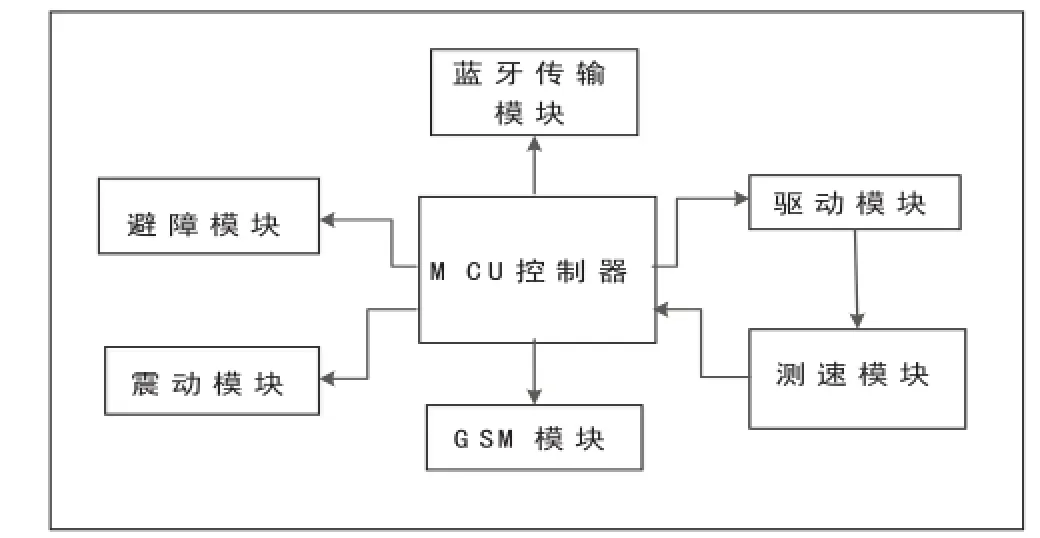
图 1 总体方案设计图
在设计中采用智能手机,通过蓝牙WE-40C模块传输给单片机,因此对单片机数据处理的要求不高,设计中采用宏晶科技生产的STC12C5A60S2芯片,该芯片指令兼容8051单片机,但速度快。最小系统设计中为实现时钟及波特率的精确控制采用11.0592MHz晶振,单片机RXD、TXD分别连接WE-40C蓝牙串口的TXD、RXD引脚。P2口与电机驱动模块L293D的INT0、INT1、INT3、INT4引脚连接,实现单片机对电机驱动模块的控制。
■2.2 电源模块
在硬件电路中需要供电的电路包括:单片机、电机驱动模块、蓝牙模块。设计中电源采用7.2V的可充电锂电池。在设计中各模块都采用5V电源,但由于电机驱动电流大,因此在设计过程中对驱动模块L293D模块采用LM2576单独供电。其余单片机模块及蓝牙模块利用AMS1117将电池的7.2V电压转换为5V电压供电。经测试在用此种供电方式下,单片机和传感器工作稳定,直流电机工作良好。
■2.3 驱动模块
本设计中驱动模块采用L293D芯片,L293是ST公司生产的一种高电压、小电流电机驱动芯片。该芯片采用16脚封装,内部是由双极性管组成的H桥电路。其输出电流为100mA,最高电流2A,最高工作电压36V,可以驱动感性负载,可以控制电机的正反转。用单片机控制晶体管使之工作在占空比可调的开关状态,精确调整电机转速,驱动模块电路如图2所示。
在图2中,使EN1与EN2两个使能端始终为1,通过控制IN1~IN4输入端的状态来改变电机的转向。
■2.4 蓝牙模块
在本设计中采用WE-40C蓝牙模块,设置一个为主机,另一个为从机。在电路中应用到4个引脚,VCC、GND、RXD和TXD,其中RXD和TXD分别和单片机模的TXD和RXD引脚连接。通过蓝牙模块主要是为了实现上位机与下位机的无线通讯功能,本质上使用的是单片机串口通信。当蓝牙模块上电后红色指示灯闪烁,与另一蓝牙模快时,蓝色指示灯常亮,便于在设计过程中判断蓝牙模块是否连接正常。
3 .软件设计
■3.1 单片机控制系统软件设计
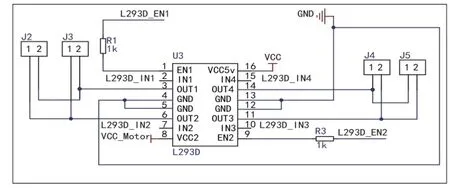
图2 L293D电机驱动电路图
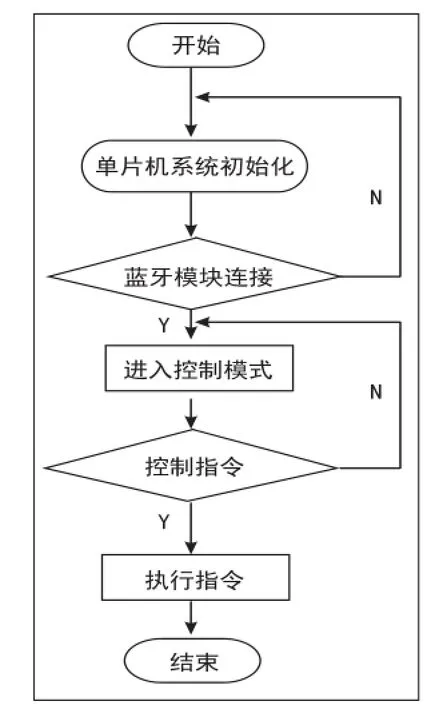
图3 单片机软件设计流程图
单片机软件设计流程图如3所示,在单片机初始化中主要完成个端口的初始化、并根据蓝牙模块传输波特率设置串口波特率初值,之后程序不断判断蓝牙连接连接是否完成,直至完成连接后,程序不断判断串口数据,当接受到控制指令分别 为 0x01、0x02、0x03、0x04、0x00,分别置值P2口为0x99、0x66、0x55、0xaa、0x00,驱动模块采用P2口数据实现电机驱动使小车完成指定动作。
■3.2 上位机软件设计
Android是基于Linux2.6系统为核心的开源手机操作系统,允许第三方软件。因此在设计过程中采用安卓手机作为上位机,设计中考虑方便操作,上位机界面设计简洁,小车主要动作由上位机上按钮触,在手机界面上设置5个按钮,用于控制小车运动状态。蓝牙进行通信,过程中需要完成4个步骤:蓝牙设置、蓝牙配对、蓝牙连接和数据传输[4]。

图4 小车俯视图
4.系统测试与结果分析
■4.1 小车整体外观
智能小车整体实物图如图 4 所示。小车有上位机和下位机两部分组成,小车控制器部分主要包括单片机控制模块、直流电机驱动控制、红外防撞模块、蓝牙通信模块及电源模块电等。
■4.2 系统整体调试
蓝牙控制智能小车可实现功能包含:可采用Android手机客户端操作界面按钮,实现小车的前进、后退、右转弯、左转弯、倒车等功能;可在小车行走过程中通过红外模块避开障碍物实现小车防撞功能; 当小车在行走过程中在超出蓝牙控制范围时,小车能够自动停止运动,避免小车失控[5]。主要调试内容如下:
(1)蓝牙通信测试。 通过安卓手机APP界面按键控制小车的前进后退,小车实现相应的运动,证明通信系统没有问题,小车能够正常工作。
(2)小车运动测试。当小车收到安卓手机发送的前进、后退、转弯、停止等指令后, 单片机能够实现控制四个直流电机做相应的 “动作”。
5.结语
设计基于Android操作系统,论述整个小车软硬件设计过程,通过测试设计智能小车可通过安卓手机实现小车运动的实时控制。本次设计中小车还可进一步完善,实现电机调速、摄像功能等。本设计的意义在于将单片机技术,蓝牙通信技术和智能终端设备有效的结合,运用车联网概念,为车载电子的无线通信设计提供了一定的参考价值。
* [1]林志翔,肖宝森.新型多功能智能小车的设计与应用[J].现代电子技术, 2011, 34 (6): 134 136
* [2]张伟辰,刘国猛,陈德为.基于安卓手机蓝牙控制的智能小车设计[J].机电技术,2016,04:28—30
* [3]徐兵,廖友成等. 基于android平台的车载导航系统研究[J].计算机策略与控制,2014,22(2):601—602
* [5]林明标、莫金海.基于安卓手机的无线重力感应控制智能小车[J].计算机测量与控制,2015,23(4):1175—1178
* [6]汤莉莉,黄 伟.基于 Android手机蓝牙控制的智能小车设计[J].现代电子技术,2016,39(12):132—134
