改进人工势场法的机械臂避障路径规划研究
2017-04-21唐彪何波
唐彪 何波
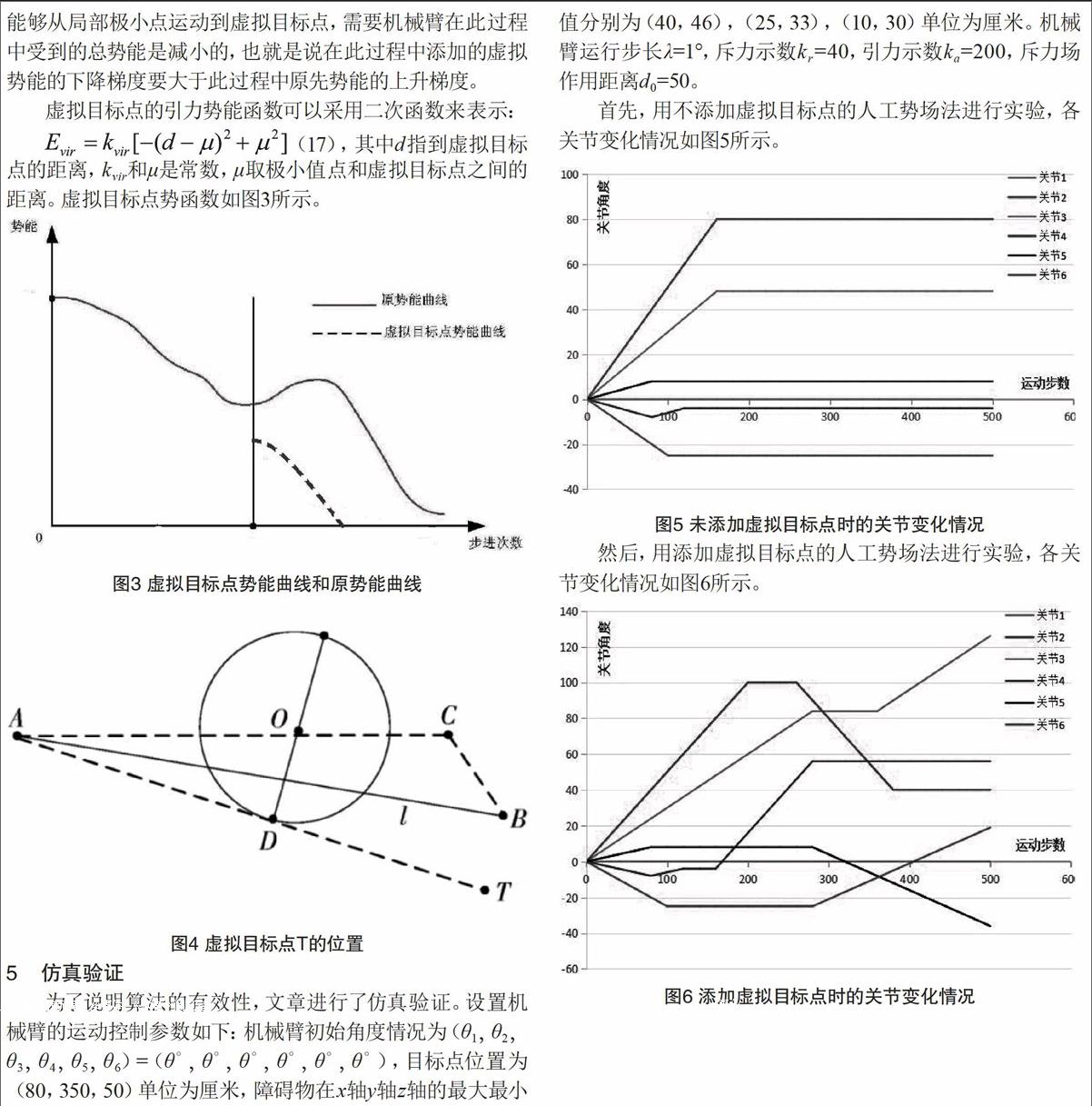

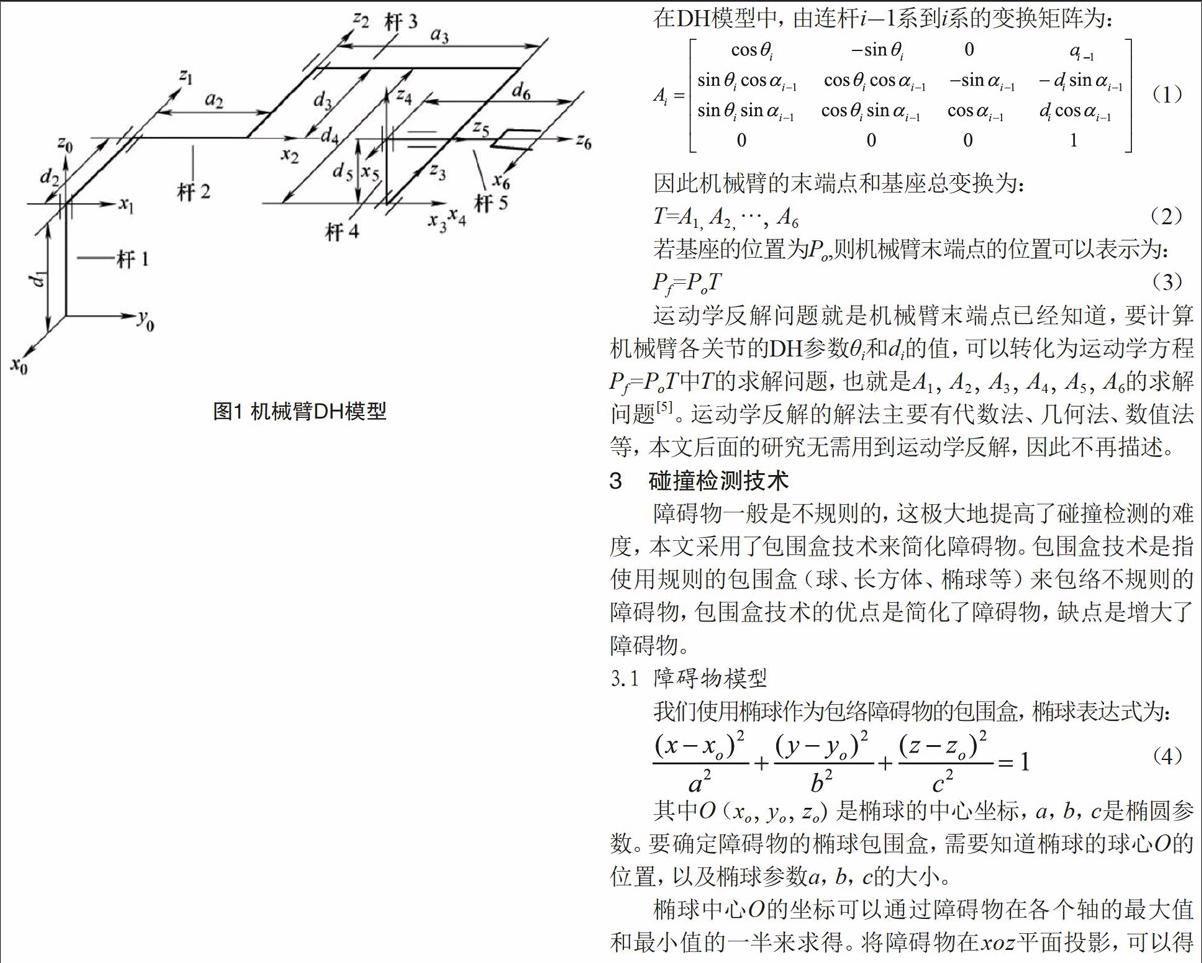
摘要:文章针对人工势场法可能会进入局部极小这一缺陷,通过添加虚拟目标点来改进人工势场法。该方法可以让机械臂逃离局部极小点,实现机械臂的避障路径规划。文章使用DH模型对机械臂进行正逆运动学分析,使用椭球包围盒进行机械臂碰撞检测,通过建立目标点,机械臂的引力场和障碍物对机械臂的引力场,再搜索势函数的下降方向,实现机械臂的路径规划。最后仿真结果验证,使用虚拟目标点的人工势场法可以快速有效地进行避障规划路径。 关键词:机械臂路径规划;碰撞检测;人工势场法 1.研究背景 机械臂避障路径规划是指在有障碍的环境下,机械臂按照某种算法找到一条从起始点到目标点的无碰撞路径。人工势场法是路径规划的一种,具有运算速度快、实时性较高的优点。人工势场法的基本原理是建立目标点对机械臂的引力场和障碍物对机械臂的引力场,在引力场和引力场作用下,引导机器人向目标点移动。人工势场法是一种局部最优的算法,容易进入局部极小点。可以通过改变局部极小点的环境来让机械臂逃离局部极小点,本文使用虚拟目标点来解决局部极小的问题。 2.机械臂系统建模 2.1机械臂运动模型(DH模型) 在对机械臂进行路径规划时,需要知道机械臂末端点和目标点的相对位置,以及机械臂和障碍物的相对位置,这种位置关系一般使用矩阵来表示。DH参数法是建立机械臂运动模型的一种有效的方法,机械臂的DH模型如图1所示。 2.2机械臂正逆运动学分析 通过机械臂各关节的DH参数θi和和di来求得机械臂末端点的坐标,称为机械臂的正运动学分析(运动学正解);如果机械臂末端点已经知道,要求机械臂各关节的DH参数θi和di,就是机械臂的逆运动学分析(运动学反解)。 虚拟目标点的位置应该设置的离真正的目标点越近越好。在图4的示意图中,点O为障碍物中心,LAB简化了的机械臂,A为基座可转动的关节顶点,B为末端点,C是目标点。假设机械臂在B点进入局部极小,通过几何分析,最快逃离方向应该在由ABc组成的平面切障碍物体积较小的那个方向(图4中为平面ABc的下方)。取障碍物上一点D使得OD垂直于平面ABC,则虚拟目标点T可以选择在线段0D的延长线上。这里让A到虚拟目标点的距离等于机械臂AB的长度,至此虚拟目标点的位置T可以确定。椭球D的方程式和目标点c都是已知的,简化了的机械臂的A点和B点都是可以通过DH参数法来求得,根据上述分析,通过解析几何的运算,可以求得虚拟目标点的T体坐标,这里不再赘述。
根据图5的实验结果,可以看出在没有添加虚拟目标点的情况下,机械臂在第157步机械臂会进入局部极小,关节停止在(48,82,0,-4,8,25)。根据图6的实验结果,在添加了虚拟目标点之后,当机械臂进入局部极小时,机械臂会逃离局部极小继续向目标点移动,在第496步到达目标点(80,350,50),此时机械臂关节为(126,41,0,56,-36,19)。該实验结果验证了添加了虚拟目标点的人工势能法在机械臂避障路径规划方面的有效性。 6.结语
本文使用DH模型对机械臂进行正逆运动学分析,使用椭球包围盒进行机械臂碰撞检测。本文使用添加了虚拟目标点的人工势场法,通过建立目标点对机械臂的引力场和障碍物对机械臂的引力场,在搜索势函数的下降方向,可以有效地防止局部极小的问题,可以实现机械臂的避障路径规划。该算法的运算速度快,安全性比较高。
