车用内置式永磁同步电机励磁电流补偿弱磁控制策略研究
2017-04-19林立赵海艳李永旷唐宏伟彭志华石书琪
林立,赵海艳,李永旷,唐宏伟,彭志华,石书琪
(邵阳学院 多电源地区电网运行与控制湖南省重点实验室,湖南 邵阳,42200)
车用内置式永磁同步电机励磁电流补偿弱磁控制策略研究
林立,赵海艳,李永旷,唐宏伟,彭志华,石书琪
(邵阳学院 多电源地区电网运行与控制湖南省重点实验室,湖南 邵阳,42200)
为提高车用内置式永磁同步电机的调速范围,实现高速巡航能力,论文深入研究了内置式永磁同步电机带励磁电流补偿的弱磁控制新策略。首先,分析了带励磁电流补偿的弱磁控制原理,其次,在Matlab/Simulink仿真平台上搭建了系统仿真模型。最后,对控制系统进行了仿真,仿真结果表明,所研究的控制策略能够实现恒转矩区至恒功率区的平滑过渡,动态响应快,并提升弱磁升速能力,为提升车用内置式永磁同步电机的应用具有一定的借鉴意义。
电力牵引;内置式永磁同步电机;弱磁控制;励磁电流补偿
内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor,IPMSM)具有结构简单、高转矩功率密度、高功率因数、宽调速范围等优点,在电动汽车、电主轴、轨道交通等领域得到了广泛应用[1-3]。高速弱磁难是IPMSM控制系统性能提升的技术瓶颈,成为国内外学者的研究热点[4-5]。本文研究带励磁电流补偿的内置式永磁同步电机弱磁控制新策略,在控制机理分析的基础上,借助Matlab/Simulink软件,构建了仿真平台并进行了系统仿真。仿真结果表明所研究的控制策略能够实现恒转矩区至恒功率的平滑过渡,动态响应快,并较好的提升了调速范围,为车用内式永磁同步电机的应用具有较好的参考价值。
1 IPMSM的数学模型
假设IPMSM三相绕组完全对称,绕组自感与互感恒定,忽略磁路饱和和铁心损耗,不计频率和温度变化对电阻的影响。可建立IPMSM在dq轴坐标系下的数学模型为:
电压方程:
(1)
转矩方程:
(2)
运动方程:
(3)
式(1)-(3)中,id、iq为dq轴定子电流分量;Ld、Lq为dq轴定子电感分量;ψd、ψq为dq轴定子磁链分量;ud、uq为dq轴定子电压分量;ψf为永磁磁链;ω为电机转轴电角速度;p为极对数;Rs为定子相绕组电阻;TL为电机负载转矩;Te为电机电磁转矩;J为电机转动惯量。
2 带励磁电流补偿的IPMSM弱磁控制策略
IPMSM的转子励磁磁场由永磁体产生,不可调节励磁电流来减弱气隙磁场,其弱磁控制是通过增加定子直轴电流id,利用直轴电枢反应使电机气隙磁场减弱,从而达到等效减弱磁场的目的。
对于逆变器供电的内置式永磁同步电机,其定子电流is和端电压us受到逆变器输出能力的限制,假设在dq轴坐标系下,电压和电流的极限值分别为ulim、ilim,则有:
(4)
(5)
考虑到电机高速稳态运行时,电阻压降远小于电抗压降,故电阻上的压降可忽略不计,则由式(1)可得稳态时的电压方程为:
(6)
将式(6)代入式(5),整理后可得电压极限椭圆方程为:
(7)
由式(7)可知,当电机电压达到逆变器所能输出的电压极限ulim时,要想继续升高转速只有靠调节id和iq来实现,增加id和减少iq以维持电压平衡,从而达到“弱磁”效果。
由式(4)和式(7)可知,电流极限圆和电压极限椭圆如图1所示。图1中最大转矩比电流MTPA控制轨迹为曲线OA,弱磁控制时定子电流沿曲线AB直到B点,从而实现弱磁扩速。

图1 定子电流矢量轨迹图Fig.1 Stator current vector trajectory
2.1 补偿弱磁控制区域及原理
恒转矩区、弱磁Ⅰ区和弱磁Ⅱ区时的电机电磁转矩、电压与电流的变化曲线如图2所示。弱磁Ⅱ区为最优控制区,而本文采用带电流补偿控制的永磁同步电机弱磁控制来提速高电机的转速,以达到弱磁Ⅱ区。
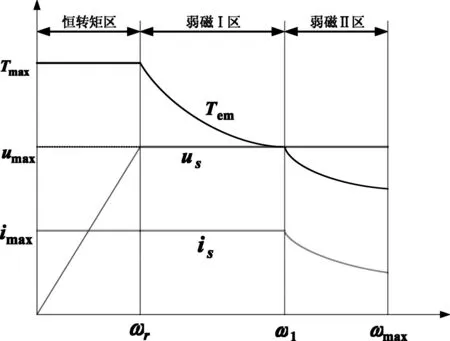
图2 弱磁控制工作区域Fig.2 Weak magnetic control working area
(1)恒转矩区

(8)

(9)
当电流矢量到达A点,若希望电机转速继续增加,则电流矢量沿着AB段轨迹运行,直至达到输出最大功率点。A点为模态切换转折点,由上小节弱磁公式推导可得在此弱磁控制Ⅰ区域。
(10)

(2)弱磁Ⅰ区

(11)
2.2 补偿弱磁控制及其控制系统
基于2.1节的理论分析,考虑带补偿励磁电流的弱磁控制系统如图3所示。系统由IPMSM电机模块、逆变器模块、坐标变换模块、SVPWM产生模块、转速和电流调节模块、带补偿励磁电流弱磁控制模块等组成。
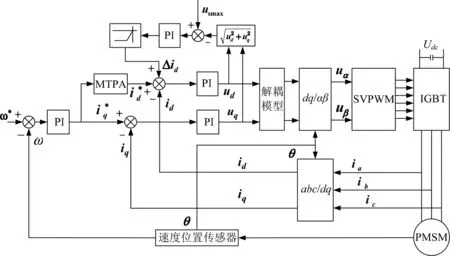
图3 带补偿励磁电流的IPMSM弱磁控制系统图Fig.3 IPMSM weak magnetic control system with compensation excitation current
3 系统仿真及结果分析
基于带补偿弱磁控制的IPMSM系统原理,在Matlab/Simulink环境下建立系统仿真模型。仿真时IPMSM电机参数为:永磁体磁链ψf=0.205Wb,定子电阻Rs=0.86Ω,交轴电感Lq=11.3mH,直轴电感Ld=5.5mH。电机极对数p=2,额定转速1500r/min。
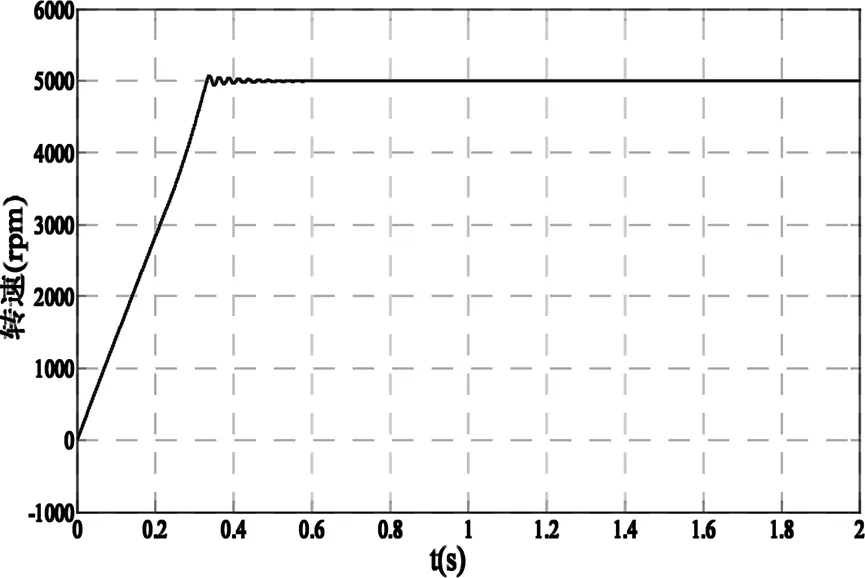
(a)转速波形(a)Speed wave
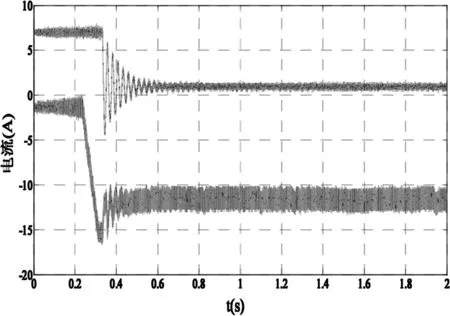
(b)id、iq电流波形(b)Wave of id and iq

(c)电磁转矩波形(c)Wave of Te
图4为带励磁电流补偿弱磁控制系统仿真波形。从图4可以看出,从0到0.3s,系统以恒定电磁转矩Te=9N·m加速起动,电机转速从0提升到5000r/min,提速过程中转速平滑上升,电流和转矩基本恒定,波动小。在0.3s后,电磁转矩跟踪负载转矩2N·m,电磁转矩与负载转矩2N·m实现平衡,电动机转速跟随指令给定值5000r/min。
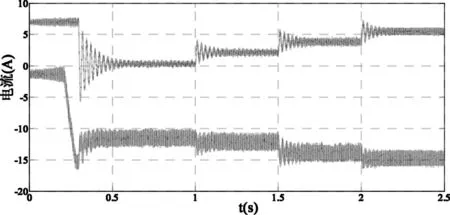
(a)id、iq电流变化波形(a)Current waveform of id and iq

(b)电磁转矩变化波形(b)Torque wave of Te
图5为加载时弱磁控制动态响应波形图,仿真运行条件是,给定电机转速5000r/min(区域2)时,负载转矩1s时变为3N·m,1.5s时变为6N·m,2s时变为9N·m,从图5可以看出,系统电磁转矩和电流波动小,动态响应快,表明系统具有良好的动态调节能力。
4 结论
理论分析和仿真分析结果表明,带励磁电流补偿弱磁控制的IPMSM系统提升了调速范围,由额定转速1500r/min,上升到5000r/min,系统的动态响应快,弱磁过渡平滑。该控制策略对于提升内置式永磁同步电机的应用具有一定的实际意义,为高速巡航及超车等工况的应用具有参考价值。
[1]Seung-ki Sul,张永昌,李正熙,等.电机传动系统控制[M].北京:机械工业出版社,2013.
[2]张朝阳,冯晓云,许峻峰.永磁同步电机弱磁运行控制策略研究[J].电气传动,2014,(05):17-21.
[3]罗德荣,曾智波,黄守道,等.电动汽车用永磁同步电机超前角弱磁控制[J].湖南大学学报,2011,38(3):1-5.
[4]石敏,冯江华,许峻峰,等.提高永磁同步电机在深度弱磁区稳定性的控制研究[J].机车电传动,2015,(1):22-25.
[5]于家斌,秦晓飞,郑军,等.一种改进型超前角弱磁控制算法[J].电机与控制学报,2012,16(3):101-106.
[6]刘正奇,林立,朱虎,等.电动助力转向系统永磁同步电机控制建模及仿真[J].邵阳学院学报(自然科学版),2015,12(1):75-80.
Flux-weakening control research with excitation current compensation for interior permanent magnet synchronous motor in electric vehicle
LIN Li,ZHAO Haiyan,LI Yongkuang,TANG Hongwei,PENG Zhihua,SHI Shuqi
(Shaoyang University,Hunan Provincial Key Laboratory of Grids Operation and Control on Multi-Power Sources Area,Shaoyang 42200,China)
In order to improve the vehicle speed range and high speed cruise capability of the interior permanent magnet synchronous motor,the flux weakening control strategy with excitation current compensation is studied in this article.The interior permanent magnet synchronous motor field weakening control system simulation model is established based on the platform of MATLAB/Simulink,and high speed weak magnetic control system simulation is carried out.The simulation results show that the system has a wide range of speed regulation and fast dynamic response,and the method provides a reference significance for further study on the high-speed cruise and overtaking and other conditions.
electric traction;interior permanent magnet synchronous motor;flux-weakening control;excitation current compensation
1672-7010(2017)01-0064-05
2016-11-18
湖南省教育厅科学研究项目(NO.16A191);湖南省科技厅科技计划项目(NO.2016TP1023)
林立(1972-),男,湖南武冈人,教授,博士,硕士生导师,主要从事电力电子与电力传动的教学与研究,E-mail:linlidexin@163.com
TM313 < class="emphasis_bold">文献标志码:A
A
