靶场时统装置同步误差实时校准方法与分析
2017-04-05余学锋张开维
余学锋,杨 标,张开维
(63870部队, 陕西 华阴 714200)
【装备理论与装备技术】
靶场时统装置同步误差实时校准方法与分析
余学锋,杨 标,张开维
(63870部队, 陕西 华阴 714200)
针对靶场时统装置同步误差校准过程中无法实时获取校准结果的问题,提出了基于精密时钟协议(PTP)的时统装置同步误差远程实时校准新方法,对时统装置同步误差实时校准系统的不确定度进行了分析;实验与分析结果表明:新方法可对同步误差为1 μs的时统装置开展实时校准,为事后的数据处理提供时间修正,也可满足靶场装备信息化管理需要。
时统装置;实时校准;同步误差
时统装置是构建靶场统一的时间基准和频率基准,确保测量控制设备同步精确工作的重要保证,也是武器鉴定试验的关键设备之一。在鉴定试验中,通过该装置可向参试设备提供标准时间信号和频率信号。由于测量控制点位多,绵延几十公里,各分散测控点位之间的时间同步非常重要。因此,时统装置的时间同步误差就成为最主要也是最关键的技术指标[1]。目前,对时统装置同步误差的校准,是将各时统分站搬运到校准中心进行。在实际操作过程中,发现该技术方法存在不足:一是无法满足实时性,不能获得使用过程中的同步误差漂移数值。由于需要把各测控点的时统装置拆下,搬运到校准试验室进行检测,时统装置有效工作时间变短。各时统主分站搬运到试验室校准,得到的只是在试验室期间各分站与标准时钟间的同步误差,只能作为评价设备性能的参考,不能真实反映在试验现场各分站工作时的时间同步状态。二是不能满足装备信息化管理需要。由于对装置的关键参数无法实现实时监测,因此不能通过监测数据预测设备技术性能。另外,如果由于某种原因,各站点测试设备间的时间出现异步,只能在试验后的数据处理过程中发现,无法进行修正。
关于时间同步误差校准问题,文献[2]提出了采用SOPC技术和GPS授时相结合,通过GPS接收机输出1 ppm脉冲信号作为测站的时间基准信号进行校准。文献[3]提出先用短波或电视信号进行一次校时,再用交叉定位精度高的区域进行二次校时的时间校准。文献[4]提出了以GPS秒脉冲信号为基准信号,通过CPLD获得时间统一系统秒脉冲与基准秒脉冲之间的时间差值的方式进行同步误差校准。这些方法都没有解决靶场时统装置同步误差实时校准的问题。本文提出了一种新的技术方法,就是依托靶场现有的测试控制网络,建立基于IEEE1588精密时钟协议的同步误差远程实时校准系统。
1 实时校准方法
1.1 同步误差校准原理结构
同步误差远程实时校准方法拓扑结构如图1所示。
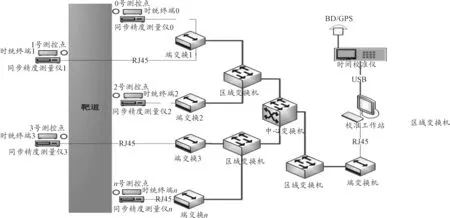
图1 同步误差远程实时校准方法
由于一般的局域网进行时间信息传递时传递路由不确定,延时抖动较大(几百微秒级),而时统装置同步误差的技术指标为1 μs,按照GJB5109对计量校准的有关要求,测量不确定度比应为1∶4以上。因此,直接通过局域网进行时统装置同步误差网上校准是不可想象的。必须在现有网络平台上进行二次开发,采用新技术,使网上时间信息传递能够满足同步误差校准需要。
IEEE 1588精密时钟同步协议(PTP)的出现[5],在测量控制领域引起一场技术性革命,它使原来基于顺序的收发命令式的数据采集传输模式,转变成以精确时间为基准的时间表模式的主动数据采集传输模式,增加了测量控制系统的灵活性和主动性。因此,根据IEEE 1588协议,设计出满足时统装置同步误差测试需要的校准方法,将会给目前的高精度远程实时测量控制领域提供一个新的应用实践。
1.2 基于PTP的时间同步误差校准系统测量原理
时间同步误差校准系统主要由自行研发的时间校准仪、同步精度实时测量仪以及计算机组成。时间校准仪通过局域网将UTC时间以高精度传递给同步精度实时测量仪,同步精度实时测量仪则实时测量各时统分站的B码秒脉冲输出与UTC的时间同步误差。所有测量结果经计算机专用软件处理,给出时统各分站间的同步误差。实际测量分三个过程,分别是调谐过程、偏移测量和延迟测量过程。
1) 调谐过程。时间校准仪和同步精度实时测量仪在进行同步之前,首先需要进行调谐,利用调谐的结果修正同步精度实时测量仪时钟产生的时间戳。
时间校准仪时钟周期性(默认每2 s一次,可设)地发送Sync报文,其发出时间为Mi(由时间校准仪时钟提供并经过链路延迟补偿),接收时间为Si(由同步精度实时测量仪时钟提供),经过一段时间以后,利用一系列的Mi和一系列的Si,使同步精度实时测量仪时钟的时间变化率与时间校准仪时钟的时间变化率对齐,调整同步精度实时测量仪时钟的时间变化率,这一过程称为同步精度实时测量仪时钟与时间校准仪时钟的调谐过程。可以使用二者时钟频率的比值RCF,对同步精度实时测量仪时钟的时间变化率进行调整。RCF是以某一帧Sync报文为起点(时间校准仪时钟的时间为Mi,同步精度实时测量仪时钟的时间为Si),到下一帧发送间隔后的Sync报文(时间校准仪时钟的时间为Mi+1,同步精度实时测量仪时钟的时间为Si+1)之间,二者时钟的流逝时间的比值[6],即:
(1)
2) 偏移测量过程。在调谐稳定后即进入偏移测量过程。如图2(a)所示,时间校准仪发出同步报文,采用多播形式发出,在测试网上的N个同步精度实时测量仪都将收到同步报文。同步精度实时测量仪收到同步报文后,根据同步报文的时间戳和报文在网络传输中的时间延时,计算出与时间校准仪的时间偏差[7]。同步计算方式如下:
(2)


(3)
从端口A到端口B的延时为:
(4)
假设端口A到端口B和端口B到端口A的平均网路延迟时间相同,即Dms=Dsm,则端口A与端口B间的网路延迟时间D为:
(5)
把式(3)和式(4)代入式(5)化简得:
(6)
利用Pdelay_Req信息包来测量平均网路延迟时间不需要Sync信息包,是一个独立的测量过程,可以直接使用预先测量的时间校准仪与同步精度实时测量仪之间的点对点平均网路延迟时间。延迟测量是不规则进行的,其测量间隔时间为1~30 s 之间的随机值,这样可以使网络的负荷不会太大。这种测量模式的引入使得在同步的执行过程中更加精确、灵活、方便。
当时间校准仪和同步精度实时测量仪完成时间同步后,就意味着同步精度实时测量仪具备了时间同步测量校准的条件,可以通过采集B码时间信息实现对分控站同步精度的校准。
(7)
偏移测量和延迟测量过程如图2所示。时间校准仪将准确的发送时间通过跟随报文Follow_Up发出,同步精度实时测量仪收到Follow_Up报文后,根据计算出与时间校准仪时间的偏差,对自身时钟进行调整,完成同步过程。

图2 偏移测量和延迟测量示意图
2 校准系统同步误差实验分析
为了通过实验验证时间校准仪与同步精度实时测量仪的时间同步性能,将时间校准仪时钟设置为接入GPS时间源的主时钟,同步精度实时测量仪时钟为端节点时钟,对时统终端输出的B(DC)码1 pps 信号进行测量。同步精度实时测量仪时钟与时间校准仪时钟分两种情况连接,一是用光纤直连,二是与中间有五台交换机的局域网相连。与此同时,采用Agilent 53132A计数器也对时统终端输出的B(DC)码1 pps信号进行测量,Tektronix7104C数字示波器作为辅助监测。对同步精度实时测量仪与53132A计数器测量结果进行比对。即用计数器测得的时间校准仪1 pps输出与时统终端1 pps输出的差值作为标称值,与用同步精度实时测量仪测得的时统终端的1 pps输出值进行比较,从而得到经过网路传输后同步精度实时测量仪与时间校准仪同步误差。测试验证如图3所示。
首先,将时间校准仪与同步精度实时测量仪通过一根光纤网线直接连接,对时统终端输出的B(DC)码1 pps信号进行测量,将其测得值与用计数器测量值进行比较。然后,将时间校准仪与同步精度实时测量仪之间接入5个支持IEEE-1588透明时钟的网络交换机,待二者的IEEE1588时钟节点同步后,记录同步精度实时测量仪测得的时统终端的1 pps输出值。测量过程均通过计算机自动采集10 000次同步精度实时测量仪与计数器比对结果,触发电平为1.5 V,数据处理结果如图4所示。可以看出,当时间校准仪与同步精度实时测量仪之间为光纤直连情况下,二者网路传输引起的平均误差为59 ns。中间有五台交换机的局域网相连情况下,网路传输引起的平均误差为161 ns。由实验可以看到时间校准仪与同步精度实时测量仪时钟之间保持了200 ns以下的时间同步精度,可以满足对发控系统同步精度1 μs时的测试要求。
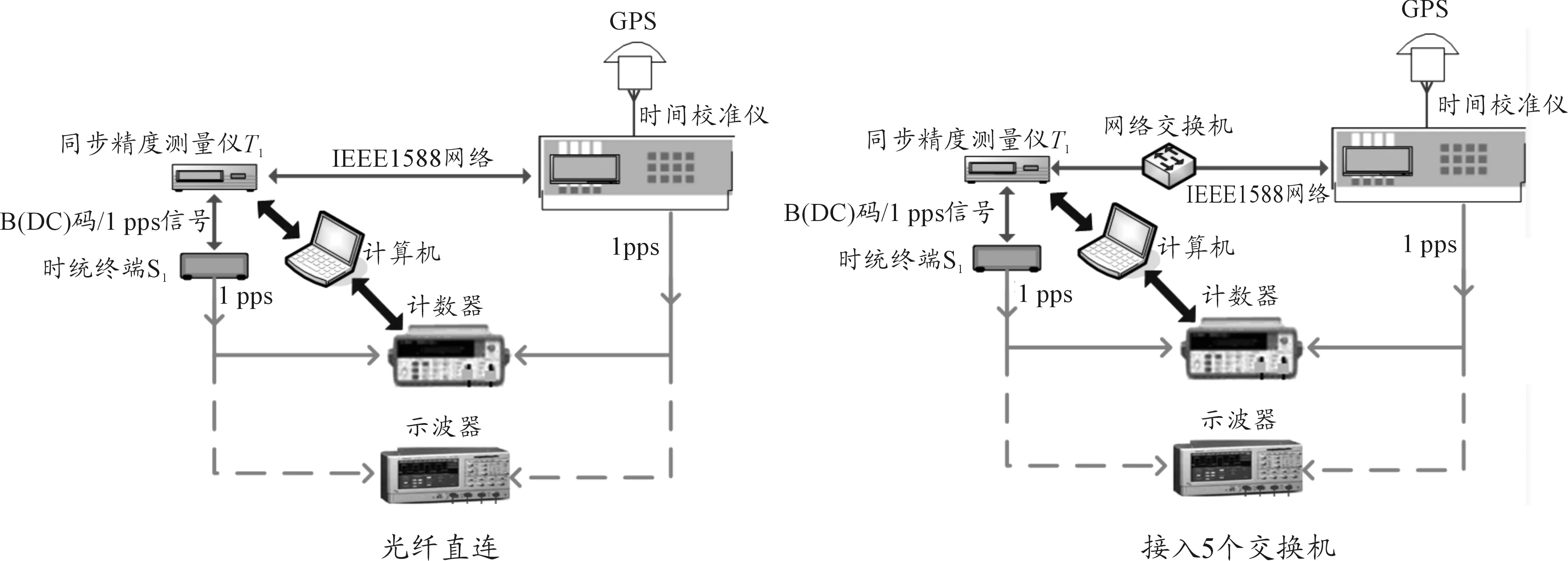
图3 同步精度实时测量仪同步性能实验验证原理图
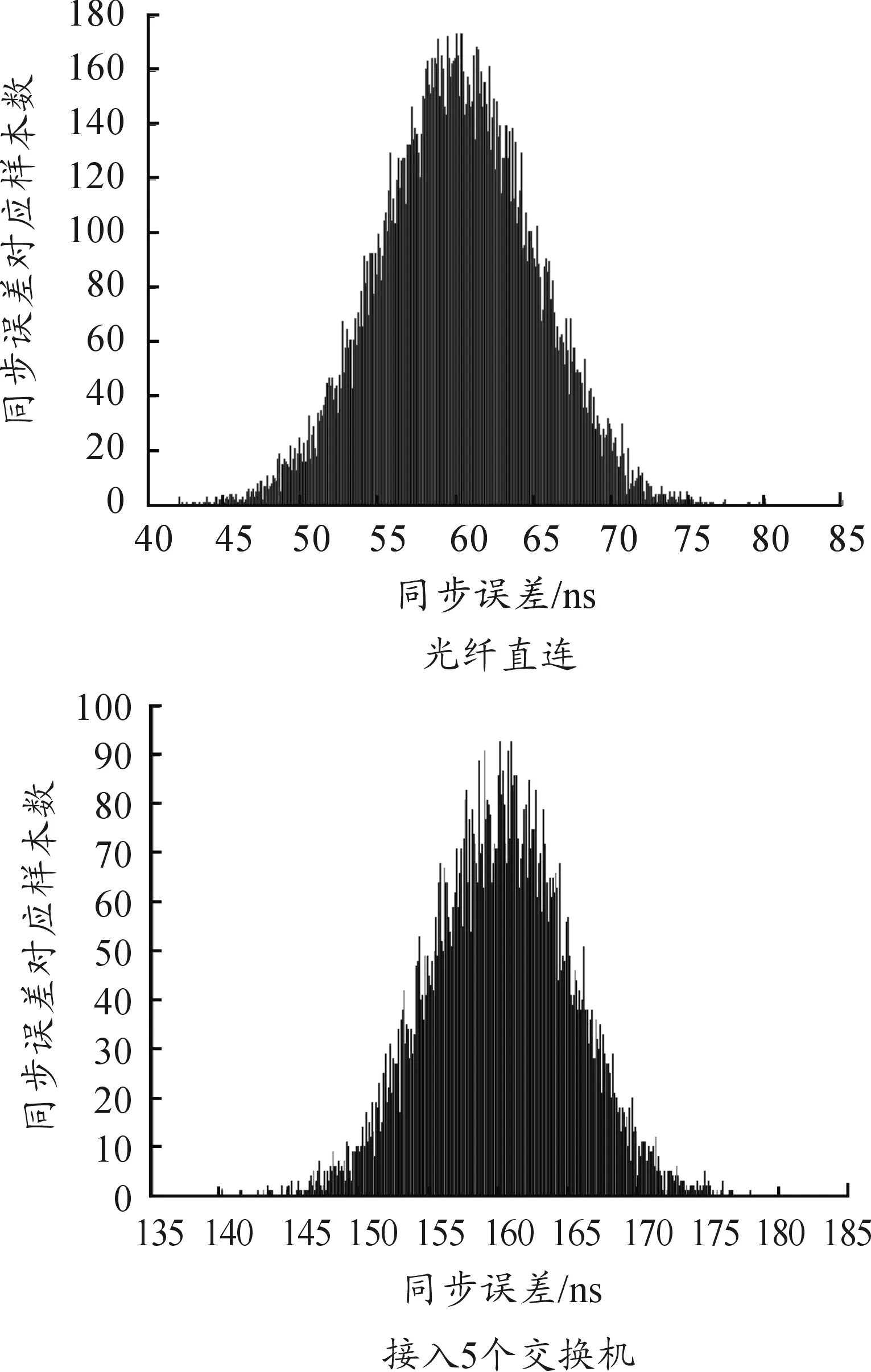
图4 时间校准仪与同步精度实时测量仪同步性能误差分布
上述测试是在校准系统同步误差专用测试网中进行,搭载在试验测试网时应考虑运行程序时网络的拓扑结构和流量的影响,因此还需对校准系统的同步性能进行不确定度分析。
3 校准系统测量不确定度分析
3.1 网络传输延时抖动引起的不确定度
引起网络传输延时抖动的主要原因有通讯通道的不对称性、网络的拓扑结构以及通信栈延时等[9]。
从时统装置同步误差校准原理可以看出,同步精度实时测量仪为计算其网络延迟和时钟偏移所进行的四次测量都是建立在一个假设的基础上,即报文的传输延迟在传输方向上是相同的。但实际中局域网电缆在设计时采用了很小的不对称设计,用以减小远程末端的串扰。同时,校准系统所基于的网络拓扑结构采用了一定量的网络交换机也会产生网络延迟的抖动,虽然采用了透明时钟方法使交换机成为网络中的一个PTP节点,近似网络中就只存在点对点的连结,有效降低了校准系统各时钟之间的延迟抖动。但实际情况交换机仍然存在一定的网络延迟的抖动,由于线路延时主要由通信栈延时和物理网络上传输的延时组成,当数据在一个没有存储转发功能的网络中进行通信时,由物理网络所产生的线路延时一般是稳定的,而通讯栈延时则会由于外界的影响产生较大的抖动。图5是网络传输延时示意图。
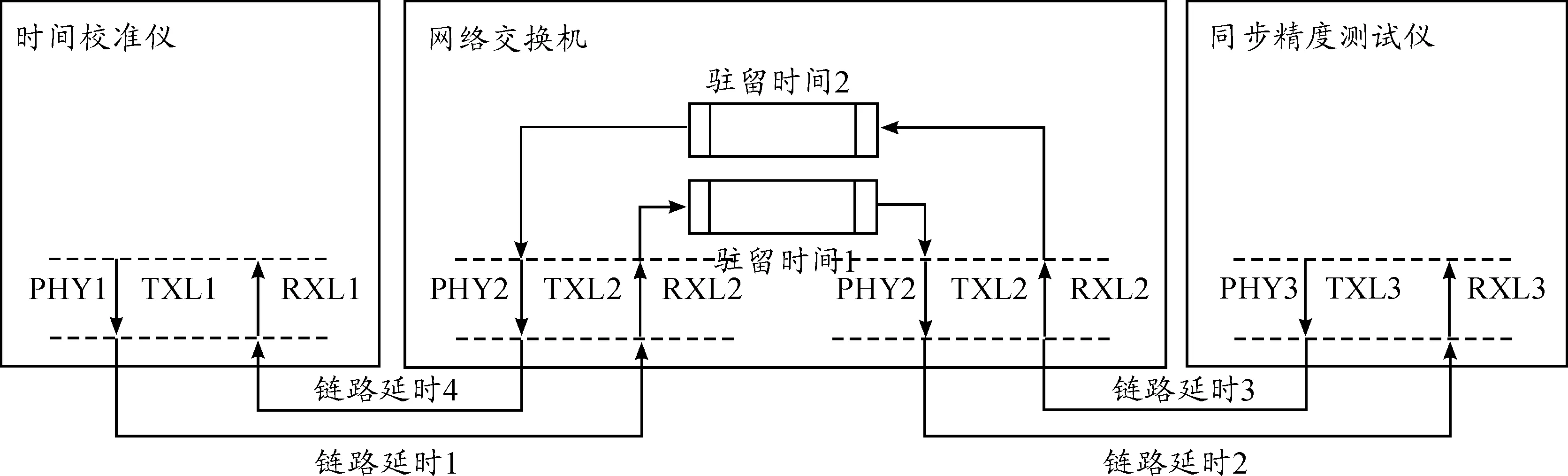
图5 网络传输延时示意图
对于一个100 Mbps的局域网来说,电信号在铜线或光纤里的传播速度约为光速的2/3,理论上传输延时抖动大概为50 ns,且与帧长无关。通过综合对各类网络的专业测试以及仿真实验验证的统计结果,并取统计量中的最大值,可以得到由于通讯通道的不对称性、网络的拓扑结构以及通信栈延时所引起的不确定度小于150 ns。
3.2 时钟的稳定性引起的不确定度


(8)
在校准系统中各时钟运行速度不同将导致各个站点时钟在同步的时隙中,偏差呈一定的斜率变化。若一个站点时钟内晶振的频率为f,频率稳定度为δ,则其实际的频率可以表示为[10-11]:F=f±f×δ,函数f(x,y)=x-y,在点(x0,y0)展开并忽略高次项有:
(9)
Δf′是变量x和y进行运算后的函数f(x,y)在(x0,y0)处的误差。
时间校准仪和同步精度实时测量仪(以下简称为主从设备时钟)中采用的晶体振荡器的参数:主设备晶振频率为fM0,频率稳定度为δM;从设备晶振振荡频率为fS0,频率稳定度为δS。主从设备的晶振频率可以表示为
(10)
(11)
式(10)、式(11)代入式f(x,y)=x-y中,然后将f(x,y)、fM0、fS0、δM和δS分别代入到式(9)中的f(x,y)、x0、y0、Δx和Δy。最后得到时间校准仪和同步精度实时测量仪的两个晶振之间的频率误差Δf为
(12)
当内部晶振选择相同的频率值,则有fM0=fS0=f0,可以得到:
(13)
校准系统在各站间设备的时钟通常由脉冲计数的方式实现,在时间同步过程中,时间校准仪时钟是同步的基准时钟,它不需要纠正,可假设其时钟是绝对准确的,所以同步精度实时测量仪时钟的误差就为Δf。它们各自时钟的计数值表示为CM(t)=fM×t和CS(t)=fS×t,同步精度实时测量仪时钟的时间计数偏移量为:
(14)
由前面的分析可得时间校准仪和同步精度实时测量仪设备间的晶振误差:
(15)
每一次计数,同步精度实时测量仪需要的时间为1/f0,所以由同步精度实时测量仪的时间计数偏移量很容易得到其内部时钟的时间偏移量:
(16)
假设每次同步过程的时间间隔为T0,将其带入式(16),就可得到各站间设备受晶振稳定度影响产生的最大的时间偏移量:
(17)
本文中时间校准仪的频率稳定度为3×10-11/s,相比较而言其对同步误差的影响可以忽略。主要考虑端各站点同步精度实时测量仪时钟频率稳定度的影响,一般为0.03 ppm,则两个站点上时钟在同步周期内(2 s)产生的偏差最大可到0.03×10-6×2×2=120 ns。
3.3 时统设备校准系统合成不确定度
网络传输延时抖动引起的不确定度:
u1=150 ns
时钟的稳定性引起的不确定度:
u4=120 ns
合成不确定度为
4 结论
时统装置同步误差远程实时校准系统的建立克服了现行校准方法遂行保障能力差、实时性不好的不足,可实现对时统装置同步误差的远程实时校准,并且当时间同步出现偏差时可在试验后的数据处理中给予修正,满足了装备信息化管理需要。
通过对校准系统的不确定度分析及评定,得到校准系统的合成不确定度为192 ns。可以完成对同步误差指标1 μs时统装置的校准。该校准方法所提供的原位校准手段,既方便了周期校准溯源,又可进行试前检测校验,有效提高了时统装置性能参数及时间基准的可靠性。
[1] 黄赛帅.靶场时统设计[D].南京:南京理工大学,2009.
[2] 李卓,开百胜.一种用于靶场多台站的时间同步电路设计[J].四川兵工学报,2014,35(2):55-58.
[3] 冯广飞,谢军伟,杨守国.一种双/多基地雷达时间校准的新方法[J].火力与指挥控制,2010,35(10):56-59.
[4] 涂文杰,杨雷,谭显春.时间统一系统同步误差测量方法研究[J].中国舰船研究,2009,4(6):62-65.
[5] IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems[S].IEEE 1588-2008,2008.
[6] MOIDOVANSKY A.Application of IEEE 1588 in Industrial Automation and Motion Control Systems[C]//Rockwell Automation,Presentation in the IEEE 1588 Workshop Tutorial,2005.
[7] 桂本炬,刘锦华.IEEE1588高精度同步算法的研究和实现[J].电光与控制,2006,13(5):90-94.
[8] NA C,OBRADOVIC D,SCHEITERER R L.Synchronization Performance of the Precision Time Protocol[C]//Precision Clock Synchronization Meas,ControlCommun,Vienna,Austria,2007:25-32.
[9] SCHRITERER R L,OBRADOVIC D,NA C,STEINDL G.Synchronization Performance of the Precision Time Protocol:Effect of Clock Frequency Drift on the Line Delay Computation[C]//Proc,WFCS,Dresden,Germany,2008:243-246.
[10]陈重,李浩.晶振稳定度对IEEE1588的影响研究[J].通信技术,2011,44(2):67-69.
[11]SCHRITERER R L,OBRADOVIC D,NA C,et al.Synchronization Performance of The Precision Time Protocol in the Face of Slave Clock Frequency Drift[C].//Proc.IEEE CASE Conf,Washington DC,2008:554-559.
(责任编辑 周江川)
Analysis of Real-Time Synchronization Error Calibration Method for Range Clock Synchronization Systems
YU Xue-feng, YANG Biao, ZHANG Kai-wei
(The No. 63870thTroop of PLA, Huayin 714200, China)
Deal with the question of synchronization errors calibration for that range clock synchronization systems can not be obtained in real-time when clock synchronization systems are actually working, a method based precision clock synchronization (PTP) was proposed and the uncertainties of the new real-time calibration system for clock synchronization systems synchronization error were analyzed and calculated. The experiment and analysis results show that the new method can achieve calibration for synchronization systems index 1 μs, and it can give the corrections of real time for synchronization errors. And it can meet the requirements for equipment information management.
clock synchronization system; real-time calibration; synchronization error
2016-10-08;
2016-11-29 基金项目:原总装备部电子信息基础部项目(AJZZ1132.01)
余学锋(1963—),男,硕士,高级工程师,主要从事兵器试验与装备测试研究。
10.11809/scbgxb2017.03.005
余学锋,杨标,张开维.靶场时统装置同步误差实时校准方法与分析[J].兵器装备工程学报,2017(3):22-26.
format:YU Xue-feng, YANG Biao, ZHANG Kai-wei.Analysis of Real-Time Synchronization Error Calibration Method for Range Clock Synchronization Systems[J].Journal of Ordnance Equipment Engineering,2017(3):22-26.
TB939;TB206.1
A
2096-2304(2017)03-0022-05
