SDZ15D超低型装载机的运动分析
2017-04-01陈勇刘志刚莫根林
陈勇,刘志刚,莫根林
(1.山东水总机电工程有限公司,山东 济南 250100;2.江苏大学机械工程学院,江苏 镇江 212000)
SDZ15D超低型装载机的运动分析
陈勇1,刘志刚2,莫根林2
(1.山东水总机电工程有限公司,山东 济南 250100;2.江苏大学机械工程学院,江苏 镇江 212000)
为研究SDZ15D超低煤层型装载机工作装置的工作性能,首先通过SolidWorks建立装载机的几何模型,其次在ADAMS环境下构建装载机的虚拟样机并进行运动仿真研究。通过分析得到了料斗举升高度、翻滚角度以及翻滚角速度随时间的变化规律。
装载机;ADAMS;分析;可靠性
井下装载机作为一种超低型的装载机,具有结构强度高,整机外形尺寸紧凑等特点,广泛适用于井下等狭小低矮等工作环境。具有装载机工作装置的物料摆角小、自动放平等优点。本文在ADAMS中将力和速度作为载荷输入,研究了SDZ15D超低煤层型装载机的反转六杆机构的工作特性。
1 装载机工作装置的建模
1.1 几何建模

图1 三维模型
采用专业三维软件SolidWorks对工作装置进行三维建模。将建好的三维模型用中间格式导入到ADAMS中进行相应的分析。创建的工作装置包括:铲斗、动臂、摇臂、拉杆、动臂油缸、转斗油缸图1所示。
1.2 约束与载荷
根据装载机工作装置的运动原理,各部件之间的运动副如表1所示。
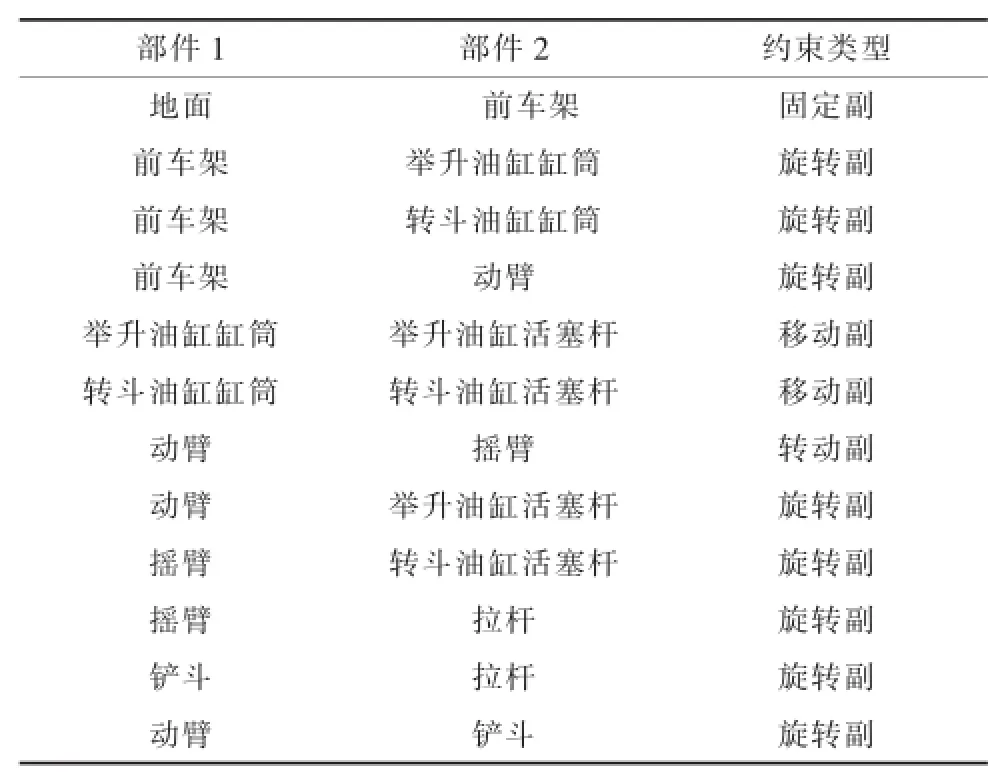
表1 各构件之间约束
根据SDZ15D超低煤层型装载机的主要技术参数,举升油缸举升的时间是4.5s,上限转斗的时间是1.5s,举升油缸下降的时间是3s。另假定铲斗插入物料的时间是3s,卸载物料的时间是1.5s,整个作业行程时间共计13.5s。
模型初始位置为插入工况。模拟仿真时间为15s,步长1000。具体作业过程为:0~3s模拟插入工况,3~4.5s模拟铲装工况,4.5~9s模拟举升工况,9~10.5s模拟卸载工况,10.5~13.5s模拟收斗找平工况。
为实现装载机的技术参数,在动臂油缸和转斗油缸的移动副上施加直线运动,按要求设定油缸的运动规律,使活塞杆实现伸缩运动,从而驱动动臂和铲斗运动。
铲斗油缸的运动规律:位移最大变化量为160mm。3~4.5s铲斗油缸运动,外伸收斗,9~10.5s内收缩卸载物料,10.5~13.5s铲斗实现自动放平,为下一次循环准备。
举升油缸的运动最大位移变化量为190mm。4.5~9s举升油缸实现外伸工作,将动臂上举。10.5~13.5s举升油缸实现收缩工作,将动臂下降。
装载机的额定载荷为1500kg。在铲斗的质心上施加物料重力,载荷的施加规律如图2所示:最大位移变化为14700mm。0~3s物料逐渐被装进铲斗,在9~10.5s物料被卸载。
1.3 ADAMS的分析计算方法
ADAMS以刚体的质心笛卡尔坐标系和反映刚体位移的欧拉角或广义欧拉角作为广义坐标,采用拉格朗日乘子法建立方程式进行计算:
ADAMS分析计算有两类算法:①三种变阶、变步长求解程序:GSTIFF积分器、DSTIFF积分器和BDF积分器。②ADAMS积分求解程序采用坐标分离算法来求解独立的微分方程,适用于模拟特征值经历突变的系统或高频系统。
1.4 仿真分析
通过ADAMS运动仿真,获得了铲车各部件的运动规律。将结构的运动过程分为5个阶段:1)装载阶段2)收斗3)提升动臂4)卸载物料5)返回初始状态。
用铲斗与水平面间的夹角,评价装载机的平移性能和卸载性能。在0~13.5s过程中,0~3s铲斗装载物料时处于水平状态,在第3s时铲斗的地面收斗角为46°,在第9s是铲斗的最大收斗角为50°,在10.5s是达到最高位置,此时卸载角为45°。在10.5~13.5s料斗逐渐返回至水平状态。由此过程说明此装置能正常的装载运输和正常的卸载。水平移动和自动放平性能也较好。料斗铲齿第9s时距离地面高度最大为1737mm。
图2为翻转角速度随时间的变化曲线,0~3s为物料装载阶段,在竖直方向没有运动。3~4.5s料斗角速度快速增大至最大后减小,使物料在铲斗收斗状态尽量全部进入避免滑落。4.5~9s举升油缸工作举升动臂,料斗角速度基本为0,说明料斗在上升过程中平稳性好,避免了物料的散落。9~10.5s卸载物料,角速度迅速增大使物料能快速的卸载。10.5~13.5s料斗缓慢放平。

图2 料斗运动角速度
图3为拉杆的受力过程,可分为5个阶段。在0~3s开始铲装阶段,料斗与拉杆铰接点处的受力逐渐增加,在3~4.5s料斗转动的过程中,受力逐渐增大,第4.5s达到最大值为21896N。4.5~9s铲斗停止翻转,动臂提升,拉杆受力逐渐减小。9~10.5s卸载物料,在第9s料斗开始卸载物料,受力逐渐减小,在10.2s左右由于铲斗惯性导致拉杆受力又变大,之后在10.5s迅速减小为0。在料斗自动放平阶段,拉杆受力基本不变。
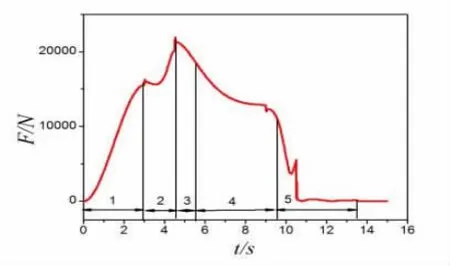
图3 拉杆的受力
2 结语
通过对SDZ15D超低煤层型装载机的工作性能的分析,获得了料斗的的平移运动规律和翻滚运动规律,研究表明SDZ15D运动较平稳。通过分析获得了拉杆的加载作用曲线,对拉杆进行了强度校核。结果表明拉杆的安全系数较高。
[1]方子帆,施仲光.轮式转载机转斗六连杆机构的优化设计[J].水利电力施工机械1998,20(1):22-26.
[2]刘银虎等编著.多体动力学仿真软件ADAMS理论基础及其功能分析[J].电子与封装2004.25-26.
(责任编辑迟明春)
TH243
B
1009-6159(2017)-01-0019-02
2016-06-04
陈勇(1987-),男,助理工程师