基于运动生物力学的人体运动建模方法
2017-04-01祝杨
祝杨

摘 要: 针对当前关键帧运动数据捕获方法进行人体运动建模准确度低的问题,提出基于运动生物力学的人体运动建模方法。首先进行人体运动的生物力学数据分析和插值重建;然后构建运动状态方程进行人体运动建模关键数据的捕获和特征分析;最后进行仿真实验,结果表明,该方法提高了人体运动分析的准确率,对运动步行、跳跃、侧手翻等人体运动的重构能力好,结果具有一定的合理性。
关键词: 运动生物力学; 人体运动; 插值重建; 建模方法
中图分类号: TN98?34; TP391 文献标识码: A 文章编号: 1004?373X(2017)05?0054?04
Abstract: Since the current key frame motion data acquisition method has low accuracy for human body motion modeling, a human body motion modeling method based on sports biomechanics is proposed. The biomechanical data analysis and interpolation reconstruction of the human body motion were carried out. And then the motion state equation was constructed to perform the capture and feature analysis of the key data of the human body modeling. The modeling method was conducted with simulation experiment. The results show that the modeling method has improved the accuracy of the human motion analysis, good reconstruction ability for human body motion such as walking, jumping and cartwheel, and the result has a certain rationality.
Keywords: sports biomechanics; human body movement; interpolation reconstruction; modeling method
0 引 言
人体运动是一个复杂的生物力学系统,对人体运动的建模分析将在指导体育运动训练、计算机游戏开发、虚拟现实仿真、影视特效表演等方面都具有重要的应用价值。对人体运动的建模过程就是对人体运动力学信息进行数据分析和提取的过程,通过捕获人体的运动生物力学数据,进行特征压缩、信息检索和重构,实现对人体运动过程的合成和编辑,达到人体运动骨骼重构的目的,研究人体运动建模方法,在指导运动康复训练方面也有重要意义[1]。
传统方法中,对人体运动建模的方法主要采用关键帧信息提取方法,结合运动图像分析实现人体运动重构[2]。比如,采用曲线简化方法把人体运动过程看作是一条运动轨迹曲线的关键特征点跟踪过程,人体运动的骨段曲线是高维空间中的一个行为轨迹。采用分层曲线方法进行行为重建[3?4],取得了一定的成果,但是該方法需要设定关键帧之间的分辨阈值,在存在较大的运动特征扰动干扰下,对人体运动重建的误差较大,人体运动建模的效果较差[5]。
针对当前人体运动建模准确度低的问题,提出基于运动生物力学的人体运动建模方法。仿真实验结果表明,本文提高了人体运动分析的准确率,对步行、跳跃、侧手翻等人体运动的重构能力好。
1 人体运动生物力学数据分析
1.1 人体运动生物力学数据的采集
常用的人体运动生物力学数据采集式有ASF/AMC (Acclaim Skeleton File/Acclaim Motion Capture data),BVH,HTR等,由于人体运动生物力学数据的非线性特性和随机分布性[6],本文采用ASF/AMC的文件格式进行人体运动生物力学数据的表达,采用安装在人体上的生物传感器和振动传感器进行信息采集,设在[k]时刻安装于人体上生物传感器的运动状态信息输出为[ωk=[ωxωyωz]T,]采用加速度计和磁力计计算人体位姿信息的输出为[bak=[axayaz]T,]运动姿态角输出为[bmk=[mxmymz]T。]设参考坐标系为大地坐标系(不考虑磁偏角),则在重力矢量和地磁场矢量的作用下,在人体的生物运动高维空间中,通过精确的姿态估计,得到人体运动的力学测量数据分别为[ra=[00-g]T,][rm=][[hcosα0-hsinα]T,]其中[g]为重力加速度绝对值,[h]和[α]分别为传感器数据随着地磁倾角的随动误差。
当人体在做步行、跳跃、侧手翻等运动时,得到一个封闭人体运动生物力学的空间运动方程组为:
式中:[θ]为人体运动的跳跃倾角;[?]为人体在做跑步运动时的俯仰前倾角;[α]为人体在侧手翻运动中的垂直偏移;[x,][y]为人体运动中姿态的水平和垂直位置;[ωx,][ωy]为非加速运动状态时在坐标系[Ox1,][Oy1]轴的力矩;[δz]为任意姿态时的身体偏角;[e1]为纵向运动的控制误差;[m]为人体的质量;[X,Y]为人体在跑步运动和跳跃运动中的空气阻力、升力、侧向力;[Mz]为俯仰力矩;[Jz]为人体运动中随着坐标系变换的转动惯量;[Jxy]为人体运动空间模型对速度坐标系[Oz1]的转动惯量。
通过上述构建的人体运动空间分布特征方程,进行人体运动生物力学数据捕获,得到步行、跳跃、侧手翻运动下的生物力学数据捕获特征方程描述为:
步行:
通过以上原理,进行人体运动生物力学数据的采集和特征分析。
1.2 人体运动的插值重建
根据上述人体运动方程和数据捕获结果,进行人体运动的插值重建,得到全局搜索下人体运动的生物力学数据观测方程:
式中:[k]为采样时刻;[qk]为[k]时刻人体运动捕获数据在载体坐标系中的姿态分解四元数;[Φk]为姿态转换阵,通过[ωk]计算出两个相邻关键帧的运动数据;[Hk+1]为观测阵,通过[k]时刻得到体运动状态空间的递归值[bak+1]和[ra]或者[bmk+1]和[rm];[εk]和[δbxk+1]分别为人体运动建模过程中的观测扰动;[Ξk]为扰动系数矩阵,通过原始运动序列和重构运动方程得到牛顿力学系数[qk]。
在人体运动状态方程重构中,采用姿态解算方法得到非线性运动姿态数据的表达方程:
为保证观测方程线性,通过二次滤波得到人体运动生物力学的捕获数据[bak+1]和[bmk+1,]由QUEST算法或者高斯牛顿迭代算法计算得出。读取穿戴在人体身上的传感器数据进行误差分析,通过插值重建方法[7?8],在观测空间中得到人体运动特征信息的卡尔曼方程:
若人体的姿态变换过程中力学分解具有非线性,采用四阶龙格库塔法求解人体姿态变换的力学分解过程为[qi(t1)=[w1,x1,][y1,z1],][qi(t2)=[w2,x2,][y2,z2]],上述分解过程表示为两个单位四元数,[θ]为采样骨骼点的夹角,表示为:
球面线性插值输出的姿态变换信息能合理反应人体运动的生物力学信息,由此实现人体运动建模力学重构。
2.2 人体运动建模实现及质量评价
用重建误差表示人体运动建模的约束指标。重建误差为原始运动序列和重构运动序列的平均运动力学矢量度量。利用加速度计和磁力计计算含有[n]帧数据的原始运动片段[om,]以[om]的骨骼生物力学作为采样点,采用运动数据插值拟合方法重建得到重建运动片段[rm。]考虑各肢体部位的速率之差,设[om,][rm]分别为原始运动序列和重构运动序列,其关节作用力矩的序列长度均为[n,]得到人体力学重构误差定义为[9?10]:
式中:[Dp(om,rm)]描述人体运动过程中相对于世界坐标系的姿势位置误差;[Dv(om,rm)]表示关节速率之差;[u]为更新的步长。
根据前期的试验可知,关节速率之差所占比例很小,所以本文设为1,由此得到人体运动建模的重构生物力学方程为:
3 实验结果与分析
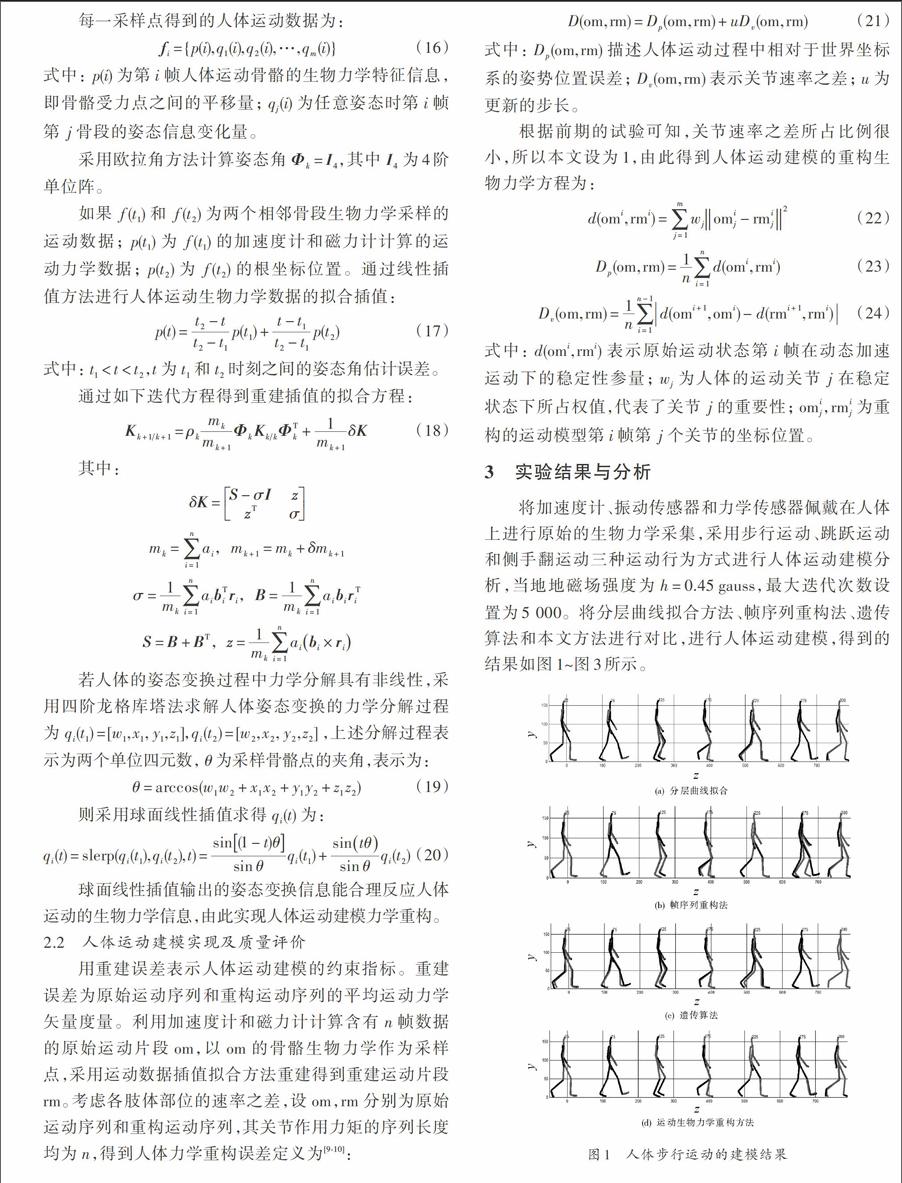
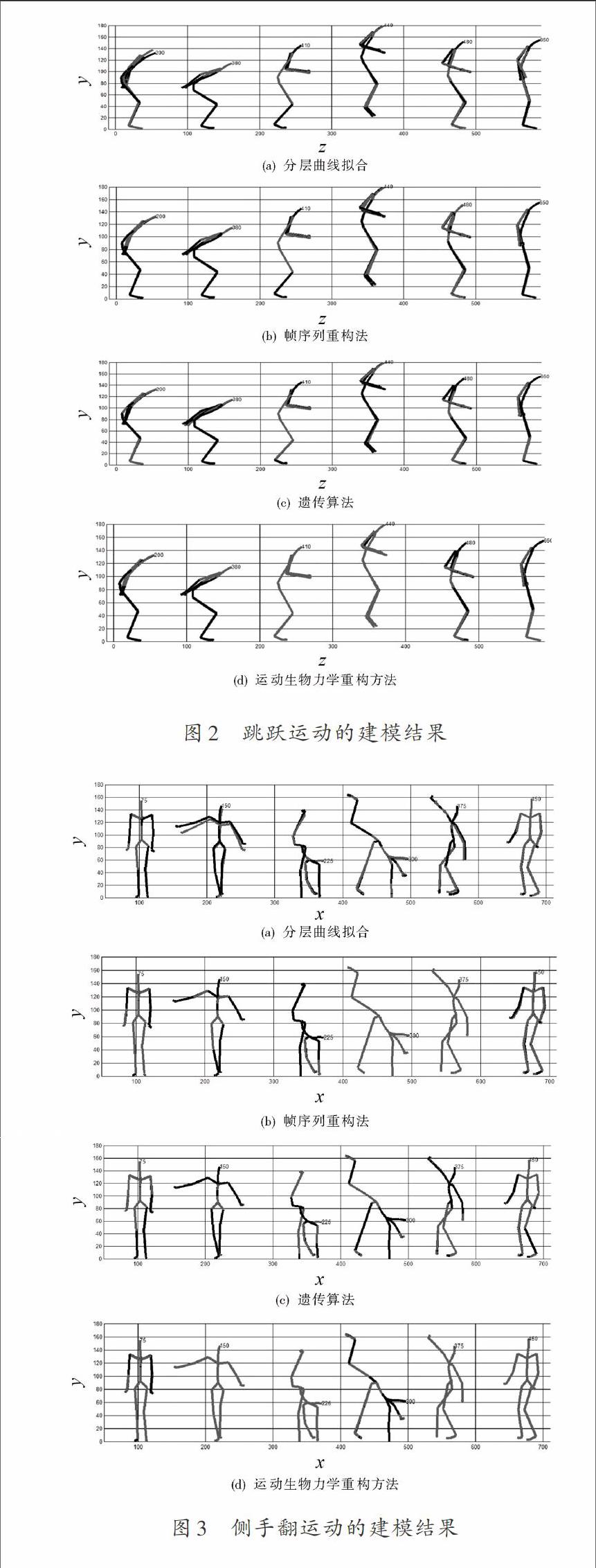
将加速度计、振动传感器和力学传感器佩戴在人体上进行原始的生物力学采集,采用步行运动、跳跃运动和侧手翻运动三种运动行为方式进行人体运动建模分析,当地地磁场强度为[h=0.45 gauss,]最大迭代次数设置为5 000。将分层曲线拟合方法、帧序列重构法、遗传算法和本文方法进行对比,进行人体运动建模,得到的结果如图1~图3所示。
由图1~图3得知,采用本文方法进行运动建模,能比较好地重构原始运动,本文方法能准确提取出边界帧,使得原始运动和重构运动差别较小。
不同方法进行人体运动建模的重建误差曲线如图4所示。分析得出,本文进行人体运动建模的重建誤差远远低于传统方法,得到最优重建误差,表明本文方法进行人体运动建模具有合理性。
4 结 语
通过捕获人体的运动生物力学数据,进行特征压缩、信息检索和重构,实现对人体运动过程的合成和编辑,达到人体运动重构的目的。本文提出基于运动生物力学的人体运动建模方法,仿真实验的结果表明,本文方法提高了人体运动分析的准确率,可以对各种运动进行有效识别,具有广泛的应用前景。
参考文献
[1] 杨涛,肖俊,吴飞,等.基于分层曲线简化的运动捕获数据关键帧提取[J].计算机辅助设计与图形学学报,2006,18(11):1691?1697.
[2] 朱登明,王兆其.基于运动序列分割的运动捕获数据关键帧提取[J].计算机辅助设计与图形学学报,2008,20(6):787?792.
[3] 陆兴华,吴恩燊,黄冠华.基于Android的智能家居控制系统软件设计研究[J].物联网技术,2015,5(11):14?16.
[4] 黄朝,许鑫,刘敦歌,等.基于多传感器的微弱磁异常信号提取方法研究[J].电子测量技术,2015,38(10):91?95.
[5] 周勇,甘新年,胡光波,等.鱼雷制导控制系统多通道控制加权算法设计[J].现代电子技术,2014,37(19):14?17.
[6] 廖一寰,李道奎,唐国金.基于混合规划策略的空间机械臂运动规划研究[J].宇航学报,2011,32(1):98?103.
[7] 邓刚锋,黄先祥,高钦和,等.基于改进型遗传算法的虚拟人上肢运动链逆运动学求解方法[J].计算机应用,2014,34(1):129?134.
[8] 柯文德,彭志平,蔡则苏,等.仿人机器人相似性运动研究进展[J].计算机应用研究,2013,30(9): 2570?2575.
[9] 柯文德,彭志平,洪炳镕,等.基于运动相似性的仿人机器人上阶梯行走研究[J].华中科技大学学报(自然科学版),2012,40(12):60?64.
[10] 陆兴华,张晓军.人员图像跟踪过程中多人交叉区域防丢失方法[J].计算机仿真,2014,31(9):243?246.
