基于MELTAC—R3技术PID无扰切换的研究
2017-04-01王瑜艾强发
王瑜+艾强发
【摘 要】CPR1000核电厂的众多系统采用PID控制,实现手动和自动控制的无扰切换关系到执行机构的寿命,影响机组的稳定运行,是控制逻辑设计时重点要考虑的问题。通过对MELTAC-R3平台的PID无扰切换研究,对后续安全级DCS实现国产化有着重要的意义。
【Abstract】Many system of CPR1000 nuclear power station adopts PID to control. It is a key problem in the design of control logic to realize the switch between manual and automatic control. Through the research of the MELTAC-R3 platform's PID switch, it is very important for the realization of the domestic DCS.
【关键词】PID;DCS;无扰切换
【Keywords】PID;DCS;disturbing switching;
【中图分类号】TM315 【文献标志码】A 【文章编号】1673-1069(2017)03-0112-02
1 引言
PID控制器具有稳定性强、使用方便、无静差跟踪等特点,被广泛应用于各种工业自动控制过程。随着数字化仪控系统(DCS)技术日趋成熟,中国改进型三环路压水堆(CPR1000)的众多工艺参数(温度、压力、流量等)系统采用PID控制,其控制回路有手动和自动控制两种方式。当自动切换到手动,执行器保持在手动切换前状态,由手动输入值控制,无扰动;当手动切换自动,若输出与切换前不一致,则产生输出扰动,对现场控制过程造成很大干扰。因此,保证手自动的无扰切换,无须人工进行手自动的对位平衡操作,是PID控制方案设计需考虑的重要问题之一。
2 PID的扰动分析
PID采用线性调节,通过对偏差(给定值r(t)与输出值c(t)之差)进行比例P、积分I、微分D计算后,实现对被控系统的控制。
典型的PID算法如下:
在核電站的控制调节中,调节阀一般都具有手自动两种控制功能。手动状态时,PID调节不起控制作用,调节阀由操作员手动通过手操器设定阀门开度。此时,根据前文描述,偏差
当控制器由手动切换到自动时,PID调节器接手手动控制作用,由上述两个条件得知,PID输入偏差e(t)为0,控制器不执行调节作用,此时,输出保持最后的手动控制值;由于PID调节器的输出U(t)等于切换前的手动控制值,切换瞬间输出不变,不会引起系统扰动[1]。
3 MELTAC-R3平台PID无扰切换的实现
某核电厂(CPR1000)安全级DCS平台采用日本三菱电机公司供货的MELTAC-N-PLUS-R3技术,按照核安全分级原则,将部分SR级和全部1E级的控制逻辑在安全级DCS平台中实现。其中,涉及模拟量调节控制部分的主要有GCT-a阀门开度控制、 ASG/RRA/RCV等相关系统的核安全相关调节阀的控制。下面以GCT-a阀门为例说明PID调节器的无扰切换功能。
GCT-a阀门的控制分为自动和手动两种方式,控制的输入测量值是VVP主蒸汽管线压力,整定值由操作站给出,当操作站置于外部模式时,整定值是78.5bar.a;当操作站置于内部模式时,整定值由操纵员手动设定SV值给出。CPU根据测量值和整定值的偏差信号,输出GCT131VV的开度信号。GCT131VV也可以通过操作站MV手动控制阀门开度。
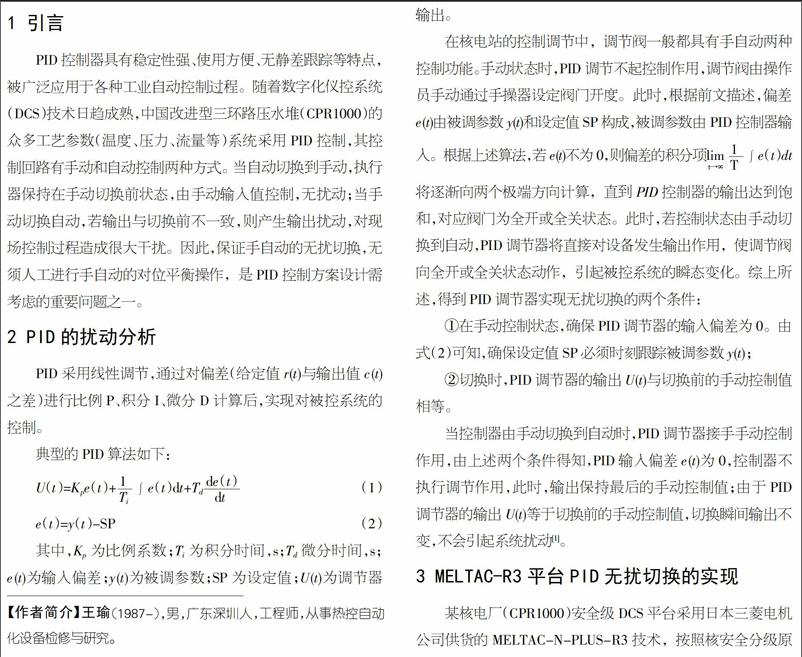
比例环节作用是输出不失真、不延迟、成比例的复现输入信号的变化。增大比例系数P可以加快系统的响应,比例系数过大会使系统有较大的超调量,产生振荡,破坏调节系统的稳定性。对于积分环节,增大积分时间常数可以减小超调和震荡、使系统更加稳定,但是增加积分时间会延长系统消除静差的时间。GCT-a阀门的PID调节未使用微分环节。
3.1 自动控制方式
控制器选择自动模式,最终输出模块的输入为S端,即PID调节器(XGCT402RG15)。PID调节器正常工作,输入为现场实测压力和设定值之差。PID调节器的输出经过限值模块LMT由AO卡输出。
3.2 自动模式切换到手动模式
自动模式时,手动输入MV值跟随自动输出,手操器的输入即为自动模式的输出,实现自动模式下手动设定值跟随自动模式的PID输出。当切换到手动控制时,因初始手动设定值MV跟随自动模式时PID的输出,扰动偏差为0,实现自动切换到手动的无扰切换。
3.3 手动控制方式
手动控制时,PID调节器的输入切换为R手动设定值,实现手操器对就地阀门的直接控制。
3.4 手动模式切换到自动模式
手动模式时,PID运算自动选择器(XGCT402RG14)选择输入为手动输出值XGCT402ME2与比例环节之差。而PID调节器(XGCT402RG15)的输入为XGCT402RG14与比例环节之和。因此,手动控制时,PID调节器的输出为手动输出值先减去比例环节再加上比例环节,即实现了PID调节的输出跟随手动输出值。此时,当阀门控制切换到自动控制时,初始扰动偏差为0,实现了手动切换到自动的无扰切换。
4 结论
论文结合安全级DCS的工程实践,对MELTAC-R3平台PID调节器的控制原理和功能做了详细介绍。通过PID无扰切换的算法分析,本质在于手动控制可以消除长时间积分的偏差,使系统更加快速的调节;而自动控制时可以消除比例作用和微分增益在切换时引起的偏差。PID调节器的手/自动无扰切换关系到现场执行机构的运行寿命和机组的稳定运行,是我们在做控制方案设计时需要重点考虑的问题,也是闭环控制系统组态调试需解决的关键问题。CPR1000核电厂采用DCS控制系统后,由于数字化带来的方便性,功能强大的PID模块与其他模块配合使用使参数跟踪更易于实现,实现各种各样的无扰切换要求。
【参考文献】
【1】黄翼虎,贾喜梅,周泽魁.调节阀PID控制器自动/手动无扰切换的实现[J].制造业自动化,2003(4):85-86.
