一种多杆系机构“推拉式”解魔方机器人设计与研究
2017-03-27姚宇菲
姚宇菲

摘 要:文章提出一种解魔方机器人方案,包含齿轮,电机,多杆系机构,旋转机构和颜色扫描机构以及电子设备组成,可实现打乱后的魔方按照既定的算法进行自动复位。另外文章对当前解魔方机器人关键技术进行探讨,指出了机器人技术是未来技术发展的方向。
关键词:机器人;结构设计;解魔方
1 概述
近年来,随着三维数字化设计和计算机技术的飞速发展,机器人设计和制造技术得到了迅猛发展[1,2],广泛应用在工业机械、日用品和科学研究当中。同时,社会对机器人研发也越来越重视,各类机器人的研制方兴未艾。
魔方是重要的益智玩具,近年来一直受到社会魔方爱好者以及科研工作者关注,然而依靠人工求解和翻转魔方步骤繁多,难度极大,于是用于解魔方的机器人的研制逐步得到社会重视。现有市场上的普通解魔方机器人翻转,运动笨拙,显示度低。或者颜色扫描机构与魔方旋转机构未能集成,智能化程度低,对轻巧型解魔方机器人进行设计研究逐渐成为科技界研究热点。
2 方法原理
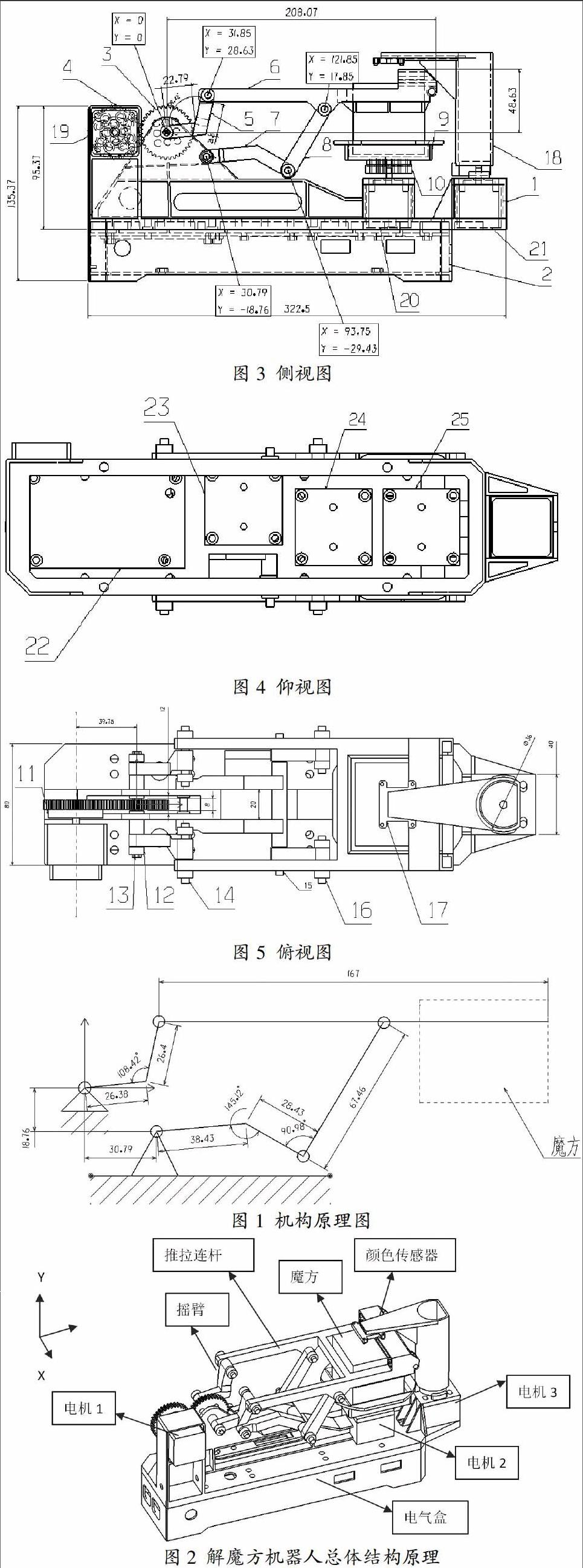
为了实现机器人轻质化和简洁化的目标,我们根据电机和魔方的尺寸,设计了一种齿轮驱动摇臂式双连杆机构。机构原理图见图1。具体实现方式为:通过电机1的驱动带动齿轮,再通过摇臂带动连杆拉动魔方,当魔方转动到一定角度的时候再反方向驱动电机1将魔方推入托盘,实现魔方绕X向转动。然后通过电机2驱动托盘带动魔方绕Y轴转动。以此类推,实现所有面的翻转。转动间隙驱动电机3帶动颜色扫描结构随时检查魔方颜色状态,最终通过计算机程序识别魔方翻转正确性。
3 详细方案
3.1 详细结构设计
本文详细方案的详细组成包括整体底座(1),设备安装盒(2),从动齿轮(3),驱动齿轮(4),驱动鹅颈(5),翻转长杆(6),从动鹅颈(7),连接杆(8),魔方支座(9),旋转电机转接法兰盘(10),驱动电机转接法兰盘(11),异形螺母(12),驱动轴(13),从动长轴(14),从动短轴(15),圆形螺母(16),颜色扫描元件(17),颜色扫描元件支架(18),翻转机构驱动电机(19),旋转机构驱动电机(20),颜色扫描机构驱动电机(21),综合控制单元(22),测控控制单元(23),电源单元(24),通讯单元(25)。
典型结构详图见图3-图5。
3.2 装配设计
本方案的装配方式为:
(a)将所有结构零件、电气元件准备;
(b)将翻转机构驱动电机(19),旋转机构驱动电机(20),颜色扫描机构驱动电机(21)用螺钉装入整体底座(1);
(c)将综合控制单元(22),测控控制单元(23),电源单元(24),通讯单元(25)装入设备安装盒(2),螺钉固定;
(d)将颜色扫描元件(17),颜色扫描元件支架(18)装入整体底座(1),螺钉固定;
(e)将电机转接法兰盘(11)中心孔插入翻转机构驱动电机(19)和旋转机构驱动电机(20);将驱动齿轮(4),驱动轴(13),驱动鹅颈(5)异形螺母(12)装入;
(f)将从动齿轮(3)用铆钉与驱动电机转接法兰盘(11)连接并与驱动齿轮(4)咬合;
(g)将旋转电机转接法兰盘(10)插入旋转机构驱动电机(20),连接将魔方支座(9);
(h)安装翻转长杆(6),从动鹅颈(7),连接杆(8),从动长轴(14),从动短轴(15),圆形螺母(16);
(i)用铆钉连接整体底座(1)与设备安装盒(2)。
3.3 功能仿真
通过使用三维设计仿真软件,对结构方案进行典型运动状态运动仿真,结果为运动机构满足要求。
(a)翻转机构抬升,颜色扫描元件停留魔方区,旋转机构运动实现单面颜色特征识别。
(b)颜色扫描机构运动离开魔方区,翻转机构下降,拉动魔方翻转。
(c)翻转到一定角度再向反方向推动魔方,实现魔方翻转。
(d)魔方翻转后,翻转机构限定魔方顶层和中间层,底层通过旋转机构驱动实现单层控制。
4 创新点
本设计方案的创新点主要有以下几点:
(1)本发明的推拉式机构巧妙,显示度高,吸引人;
(2)仅用3个电机实现全部魔方解码自动操作功能,重量和功率省;
(3)翻转机构、旋转机构和颜色扫描机构集成在一个底座上,解算更高效;
(4)使用整体底座,零件数量少,装配方便。
5 解魔方机器人关键技术
解魔方机器人技术涉及结构机构、电气和软件编程等多学科知识,技术领域新,难度大,当前国内在研究解魔方机器人方面还处于起步阶段,尚存在以下几类关键技术急需突破:
5.1 高可靠轻巧型结构机构设计技术
当前国内现有的解魔方机器人存在普遍问题是结构笨重、机构简单,翻转可靠性低,导致的结果是功耗高、显示度低,经常翻转出错,难以市场化。
5.2 基于机电一体快速解魔方计算机算法
当前的人工解魔方算法例如“层减法”等已经非常成熟,但是如何用机电一体可翻译成机器语言和机构动作协调的算法尚未有效突破,导致翻转步骤过多,有的达到800多步才能完成魔方解算,效率低。
5.3 高分辨率复杂颜色快速识别技术
在魔方翻转过程中,颜色的识别是重要的内容,目前多数机器人对魔方的颜色块识别不准确,也是制约解算成功率的关键环节。
6 结束语
魔方是世界著名玩具和智力工具,机器人必将成为未来先进制造技术的发展趋势。希望社会各界有更多的人来关注解魔方机器人技术,并将其中的先进成果推广应用到其他领域,促进社会科技的进步。
参考文献
[1]李瑞峰.中国工业机器人产业化发展战略思考[J].航空制造技术,2010(9):32-37.
[2]逄淑敏.沈阳机器人产业发展模式研究[D].沈阳大学,2015.
