固定翼飞机轨迹稳定性飞行仿真张
2017-03-27张喆尤俊彬
张喆+++尤俊彬


摘 要:针对固定翼飞机反区操纵带来的飞行安全性问题,分析了产生反区操纵的原因,设计了一种飞行控制律,可使得飞机改变本体的轨迹稳定性,仿真结果表明,在不同反馈增益的情况下,飞机轨迹稳定性出现了较大的变化,可将原有的一级飞行品质变为二级和三级。
关键词:动力学建模;轨迹稳定性;控制律设计;飞行仿真
1 概述
飞机着舰与在陆基机场着陆存在很大的区别,由于航空母舰不是一个固定的坐标,在海浪中它是处于六自由度的运动之中。另外由于允许着陆区域小得多,飞机的着舰点的精度对飞机的着舰安全影响很大,因此要求舰载机的着舰精度比常规陆基飞机要高得多。由于舰载机为了满足在航空母舰上着舰要求,它的着陆速度一般要比陆基飞机小得多,因此飞机的轨迹稳定性较差,现代战斗机为了保证高速性能通常采用小展弦比的机翼,也使得它的低速轨迹稳定性更差。较差的轨迹稳定性,常常使得飞机处于反区操纵区间内,这种操纵方式往往使得飞行员处于不习惯状态,甚至引起坠机的事故,因此对飞机轨迹稳定性的研究和模拟对试飞安全和飞机设计定型意义重大。
2 飞机反区操纵的成因
可用图1所示说明反区操纵成因,图中Vyl即为有利速度点Vopt,当飞行速度高于Vyl时,若飞机由高速平飞转到低速平飞时(即速度减小ΔV1),则需增大迎角和减小可用推力,此时飞行员应同时后拉驾驶杆和油门杆;若飞机由低速平飞转到高速平飞时,则需减小迎角和增大可用推力,此时飞行员应同时向前推驾驶杆和油门杆。这种操纵动作符合飞行员的操纵习惯,故称大于Vopt的速度范围为正操纵区。然而,在飞行速度小于Vopt时,操纵动作却不同,同样飞机由高速平飞转到低速平飞时(即速度减小ΔV2),飞行员要拉杆以增加迎角,同时推油门杆以增加发动机的可用推力P,以达到与平飞需用推力Ppx相等,实现等速平飞;而飞机由低速转到高速平飞时,则飞行员应前推驾驶杆和后拉驾驶杆。这种操纵动作和飞行员操纵习惯相反,故称此平飞范围为反操纵区。
3 低动压下飞行轨迹稳定性与反区操纵的关系
飞机在航母上进行起飞或着舰任务时,要进行上升或下滑操纵,在此飞行状态往往处于低动压情况下,和肯能使飞机进入反操纵区。在飞行反区操纵飞机时,往往与正区操纵习惯相反。
如图2所示,为典型战斗机飞机的上升极曲线,在正区操纵时,欲使飞机从原来的θ=5°的定常上升状态C转入以θ=10°的定常上升状态E,那么飞行员后拉杆即可实现。在拉杆的最初瞬间,由于飞行速度尚来不及改变,故速度以D点表示。但由于D点落在减速区,飞行速度回自动减小而趋于E点,并最终在该点建立起θ=10°的等速上升状态。因此,在正区范围内控制上升航迹原则上只须移动一次驾驶杆就可完成。
在反区范围内改变飞行状态就要复杂得多。例如,欲使飞机从原来θ=15°的点B定常上升状态转到以θ=20°的点A定常上升状态,若仍按照正区操纵方法,即后拉驾驶杆,则在后拉杆的最初瞬间,速度尚来不及改变而落在减速区的F点上,因而速度继续减小,永远不可能转入速度較大的点A飞行状态。所以,在反区范围内,按正常操纵规律是不可能实现预想的飞行状态的改变。为此应在点B先向前推杆使飞机转入θ较小的加速区点G状态,然后让飞机加速到对应于点A的速度(或稍大于A的速度),此时再后拉杆使飞机转入θ=20°的点A定常上升状态,而这往往要反复调整驾驶杆才能实现。
在陆地机场执行飞行任务时,即是包括起飞着陆任务在内,由于飞行速度较高,飞机都处于正区操纵,而由于航母起降的特殊性,飞行速度较低,飞机往往处于飞行反区。所以反区操纵的问题在舰载机试飞中特别值得关注。在飞行品质规范要求中,往往以轨迹稳定性来判定飞机在低速时的操纵特性。
根据8785-B有关的飞行轨迹稳定性要求:飞行轨迹稳定性是按照飞行轨迹角随空速的变化来定义的,此时空勤人员不改变油门位置,空速只由于使用升降舵操纵而改变。对于着陆进场飞行阶段,飞行轨迹角对空速的曲线在V0min处的局部斜率应为负值或小于下列数值的正值:
a.等级1:0.06度/里/小时
b.等级2:0.15度/里/小时
c.等级3:0.24度/里/小时
推力状态应该是以V0min作正常进场下滑轨迹所要求的推力状态。飞行轨迹角对空速的曲线在比V0min小5里/小时处的斜率,在正值方向应不大于0.05度/里/小时,如图3表示:
4 不同轨迹稳定性品质的模拟控制律设计
由于相关的飞行品质要求明确了飞机设计中的轨迹稳定性要求,所以对要求中的3级品质分别模拟,就对现役大部分飞机(包括轨迹稳定性不好的飞机),和即将服役的舰载机的轨迹稳定性进行模拟。
4.1 轨迹稳定性关键参数分析
已知IFSTA飞机在高度500米,0.2马赫数下的小扰动数据如下所示:
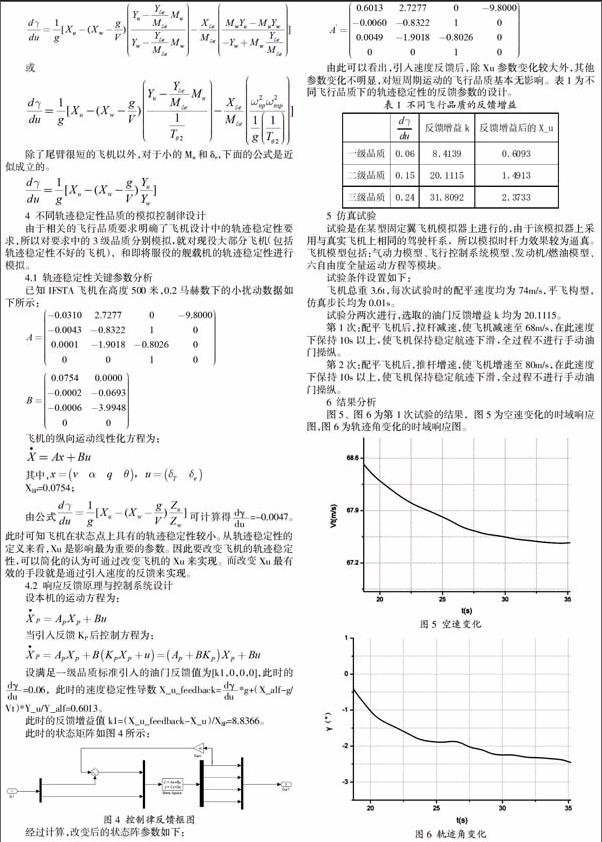
由此可以看出,引入速度反馈后,除Xu参数变化较大外,其他参数变化不明显,对短周期运动的飞行品质基本无影响。表1为不同飞行品质下的轨迹稳定性的反馈参数的设计。
5 仿真试验
试验是在某型固定翼飞机模拟器上进行的,由于该模拟器上采用与真实飞机上相同的驾驶杆系,所以模拟时杆力效果较为逼真。飞机模型包括:气动力模型、飞行控制系统模型、发动机/燃油模型、六自由度全量运动方程等模块。
试验条件设置如下:
飞机总重3.6t,每次试验时的配平速度均为74m/s,平飞构型,仿真步长均为0.01s。
试验分两次进行,选取的油门反馈增益k均为20.1115。
第1次:配平飞机后,拉杆减速,使飞机减速至68m/s,在此速度下保持10s以上,使飞机保持稳定航迹下滑,全过程不进行手动油门操纵。
第2次:配平飞机后,推杆增速,使飞机增速至80m/s,在此速度下保持10s以上,使飞机保持稳定航迹下滑,全过程不进行手动油门操纵。
6 结果分析
图5、图6为第1次试验的结果,图5为空速变化的时域响应图,图6为轨迹角变化的时域响应图。
图7、图8为第二次试验的结果。
当飞机具有好的轨迹稳定性时(即负的轨迹稳定性),在配平速度下,减速时,飞机轨迹爬升(即拉驾驶杆);增速时,飞机轨迹下降(即推驾驶杆)。从试验情况可知,通过对加以响应反馈的控制律,可以使飞机呈现出正的轨迹稳定性,拉杆后,飞机的航迹还在下降;推杆后,飞机的航迹在爬升,正是反区操纵时飞行所呈现出的特点。
7 结束语
通过给飞机油门杆加以反馈自动控制,可以改变飞机的轨迹稳定性,使一架具有良好轨迹稳定性的飞机变为具有轨迹不稳定的特性。通过这种控制律设计方法在飞行仿真上的应用,对于培训飞行员有良好效果。特别是舰载机飞行员的培训工作,可以让飞行员在模拟器上就体会反区特性飞机的操纵响应特点,加深他们对反区操纵的印象。
