3K型行星减速器装配设计与运动仿真分析
2017-03-25王力赵建平陈正兴
王力,赵建平,陈正兴
(南京理工大学紫金学院机械工程学院,江苏南京210023)
3K型行星减速器装配设计与运动仿真分析
王力,赵建平,陈正兴
(南京理工大学紫金学院机械工程学院,江苏南京210023)
3K型行星齿轮传动是一种较为常见的行星传动类型。通过研究2K-H型行星齿轮传动的配齿问题,将3K型行星齿轮传动转化为两级串联的2K-H型行星齿轮传动,从而推导出3K型行星齿轮传动的传动比;根据3K型行星齿轮传动的设计和装配条件,优化出齿轮的配齿方案与齿轮计算;运用SolidWorks进行实体建模和运动学分析,得出位移与时间之间的函数关系曲线,验证设计与装配的正确性;运用ADAMS进行动力学分析,得出输入、输出端位移、速度及加速度与时间之间的函数关系曲线,验证结构设计的合理性与可行性。
行星减速器;SolidWorks;ADAMS;运动仿真
行星齿轮减速系统在机械系统中主要用于传递动力和运动过程。因其具有体积小、传动功率大、传动效率高、承载能力大、噪声小、运行平稳等诸多特点而广泛应用于航空、船舶、汽车、军事、机械、冶金等各个领域[1-2]。
行星齿轮减速器有多种结构类型,常见的有NGW、NW、NN、NGW型等[3],在不同领域中发挥着重要的作用。3K型行星齿轮传动是一种较为常见的行星传动类型,具有结构紧凑、传动比大和承载能力强等优点,适用于诸多工作场合。
针对3K行星减速器系统的结构特点,分别运用三维设计与分析软件SolidWorks与ADAMS建立其运动学与动力学模型,研究其运动和动态特性,对行星减速器的设计具有非常重要的指导意义。
13 K型行星减速器的参数设计
1.1 机构简图及工作原理
3K型行星减速器机构简图如图1所示[4]。从图中可以看出,3K型行星减速器拥有2级减速机构,分别由高速端2K-H(NGW)型与低速端K-H(NN)型行星减速装置组成。因此,可将此轮系从中间虚线处转化为两级串联的2K-H型行星减速装置。先研究2K-H型行星齿轮减速器的配齿问题,再进一步推导出3K型行星减速器的传动比。
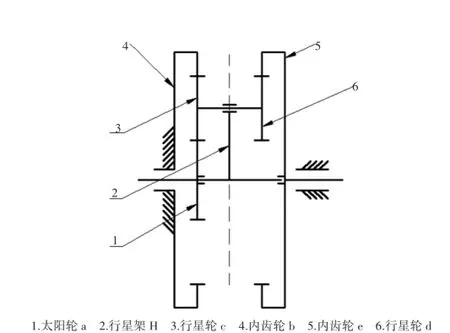
图13 K型行星减速器机构简图
1.2 减速器传动比计算
(1)高速端传动比计算
高速端为2K-H(NGW)型行星减速装置,该机构由输入轴、太阳轮a、行星轮c、内齿轮b以及行星架H构成。以行星架H作为周转参考系进行齿轮传动计算。由齿轮传动计算公式可得以下公式:

(2)低速端传动比计算
低速端为2K-H(NGW)型行星减速装置,该机构由行星架H、内齿轮b、行星轮c、d和内齿轮e组成,所以根据差动系齿轮传动计算法则可以得到以下公式:

(3)总传动比计算
根据以上计算推导,可得减速器总传动比:

1.3 齿数分配方案与齿数的计算
(1)设计与装配条件[5]
在3K型行星减速器的设计中,由于结构复杂、传动环节多、传动精度要求高等诸多情况,除了确定传动比外,还应确定同心、邻接、装配等三个条件。对于3K型行星减速器的设计与装配条件作以下设定:

2)邻接条件:仅仅在齿轮间留有间隙是不够的,必须同时保证行星架具有足够的刚度,要求其中心距大于行星轮齿顶圆直径。如果采用标准齿轮,行星轮个数Cs一般为3.
3)同心条件:各齿轮模数相同的非变位,或高度变位传动,其同心条件如下:

(2)齿数的分配方案与齿数计算[6-7]
齿轮公式建立条件与假设:Za、Zb、Zc均为行星轮个数Cs的整数倍,故而将Za、Zb均以为Cs自变量的函数表示为Za=ACs、Zb=BCs.A、B为任意正整数。
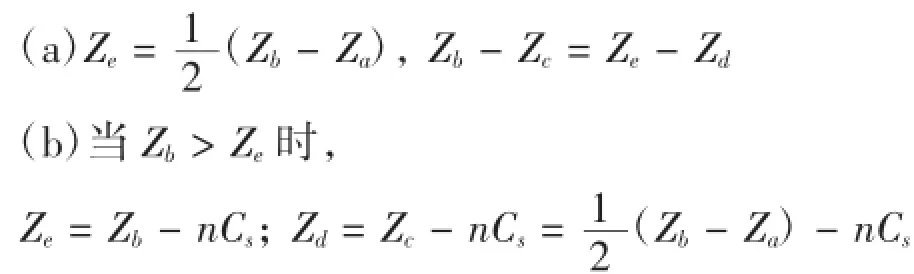
当Zb<Ze时,
Zb=Ze-nCs;Zc=Zd-nCs
上述计算尚未满足计算公式的齿数分配。在满足前提条件的情况下,对于传动比进行分配与计算。齿数计算公式与推导过程如下:
齿数计算推导公式:
方案1:Zb>Ze

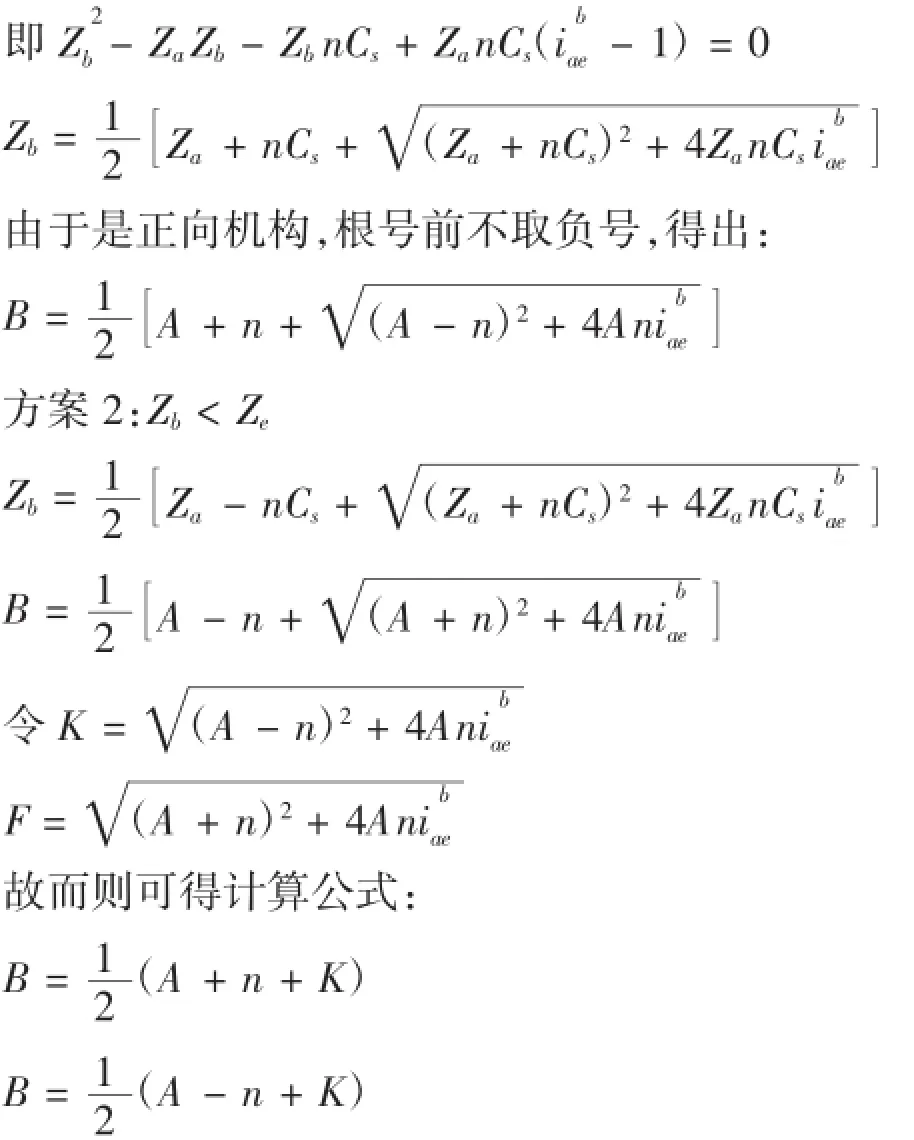
根据方案1和2计算公式,查到或自行选取合适的K,F值,分别确定其齿数分配方案。
方案1:Zb>Ze
行星轮Cs=3、整数n=1,传动比,齿顶高压力角α=20°,啮齿角α′=54°.
取A=7,K=38,根据以上计算公式得出:
Za=21,B=69,Zc=24,Zd=21
由以上参数算出传动比:
方案2:Zb<Ze
行星轮Cs=3,整数n=1,传动比齿顶高,压力角α=20°,啮齿角α′=54°.
取A=8,F=41,根据以上计算公式可得:
Za=24,B=24,Zb=72,Zc=24

由以上参数算出传动比:

2 三维建模与装配
三维建模与装配是利用三维设计软件对各个零件实体化建模,在此基础上实现组件装配。Solidworks是美国公司开发的三维参数化特征造型CAD软件,其技术内核基于先进的Parasolid图形语言平台[8]。
减速器的装配过程采用自下而上的设计方法:先完成单元零件的设计,将其插入装配体,然后按照配合和约束条件完成装配体。3K行星减速器主要零件包括输入/输出轴、太阳轮、内齿轮、行星轮、行星架及基座等。如图2所示。

图2 三维装配图
在建模或装配过程中可能产生误差导致出现零件之间相互穿透、彼此重叠等不真实现象。因而在装配完成后,须进行干涉检验,以便及时查出原因并做出修改,避免加工过程中出现配合误差。干涉检查结果如图3所示。

图3 装配干涉检查
由干涉结果得出:装配体符合运动学与动力学分析的要求。
3 运动仿真分析
3.1 运动学分析
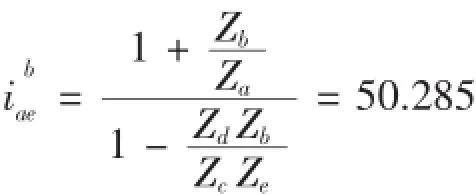
针对3K型行星轮减速器装配体,运用Solidworks分析软件,在运动学模型中添加约束进行运动仿真。仿真界面如图4所示。
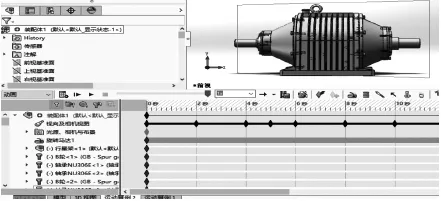
图4 仿真界面
在仿真过程中,在输入轴端设置一个匀速运动的回转马达,其转速设定为100 r/m,则可以得到马达的位移与时间之间的函数曲线,如图5所示。

图5 位移与时间之间的函数关系曲线
由于输出端所获得的位移量为角度,可以通过计算验证运动仿真的真实性与准确性。转化过程如下:
由图5输出端的位移与时间的函数曲线可以得到直观的数据量,即总输出位移:γ=336°,总输出时间t=28 s,因此:

由验证结论可以得到仿真结果符合设计预期。
3.2 动力学分析
为了增加仿真结果的可信度,运用ADAMS进行进一步的运动仿真,得到运动仿真结果。其设置过程如下[9]:
(1)将Solidworks中的三维模型做轻化处理,以保证仿真过程的流畅性。
(2)将Soilodworks运动模型以parasoild格式导入ADAMS.(3)在对于导入后的模型添加约束使其完全定位。(4)建立与Solidworks中一样的驱动方式与输入参数。
通过动力学分析,可得输入端和输出端的位移、速度与加速度的函数曲线,如图6所示。
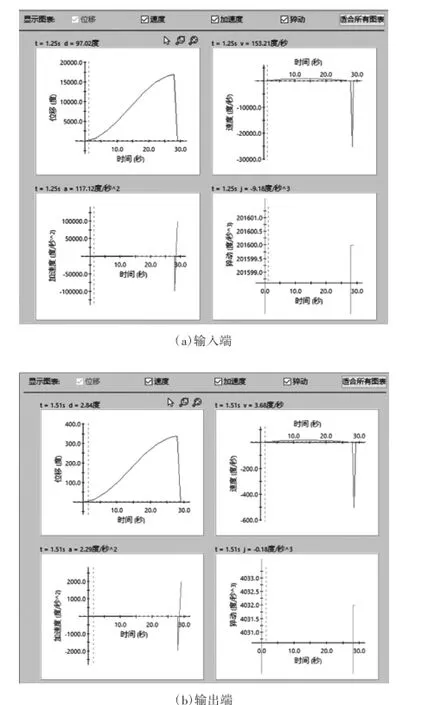
图6 位移、速度与加速度函数曲线
由图6的ADAMS仿真结果可知:本次设计的行星轮运动平稳,满足设计需求,但骤停下稳定性欠佳。
4 结束语
3K型行星减速器传动结构复杂、传动环节多、设计过程繁琐,参数选择、结构设计合理及运动过程中各个零部件之间的完整匹配直接影响减速器的工作性能。运用三维软件SolidWorks建立实体模型、干涉检查、运动学分析,得到了输入/输出端位移与时间的函数曲线,验证了减速器设计与装配的正确性;运用ADAMS软件进行动力学分析,得到了输入/输出端位移、速度及加速度与时间的函数曲线,进一步验证了减速器结构设计的合理性和可行性。
[1]赵雅珠.微型行星齿轮减速机构制造工艺概述[J].机械设计与制造,2009(9):242-243.
[2]方振江,华青松.3K-Ⅱ行星传动机构四个关键参数的确定方法[J].机械传动,2016,40(2):158-161.
[3]伍琼仙.NGW型行星齿轮减速机构设计自动化系统研究[D].成都:西南交通大学,2011.
[4]陈彬,黄庆九,王鑫,侯迎峰.渐开线3K型行星齿轮传动效率分析[J].机械设计与制造,2015(6):87-94.
[5]张少名.NGWN(3K)型行星齿轮传动齿数的分析与计算[J].长安大学学报(自然科学版),1980(1):97-116.
[6]杨文教,王玉英,张凤云.一种3K型行星齿轮传动各轮最佳齿数的分析[J].吉林工学院学报,1989,10(2):80-83.
[7]杨文教,杨昌群,杜欣.一种3K型行星齿轮传动各轮最佳齿数的分析(续)-最佳齿数的确定[J].吉林工学院学报,1990,11(1):39-43.
[8]李亚强.行星减速器虚拟装配与动力学特性研究[D].武汉:武汉理工大学,2009.
[9]郑建荣.ADAMS:虚拟样机技术入门与提高[M].北京:机械工业出版社,2002.
Assembly Design and Motion Simulation Analysis of 3K Type Planetary Gear Reducer
WANG Li,ZHAO Jian-ping,CHEN Zheng-xing
(Zijin College of Nanjing University of Science and Technology College of Mechanical Engineering,Nanjing Jiangsu 210023,China)
3K type planetary gear transmission is a common type of planetary transmission.Through the study of the distribution of 2K-H type planetary gear transmission,the 3K type planetary gear transmission is transformed into the 2K-H type planetary gear transmission with two stages in series,thus the transmission ratio of the 3K type planetary gear transmission is deduced.According to the design and assembly condition of 3K type planetary gear transmission,the gear matching scheme and the calculation of gear are optimized.Using SolidWorks to carry on the entity modeling and the kinematics analysis,obtains the displacement and the time function relation curve,verifies the design and the assembly accuracy.Using ADAMS for dynamic analysis,the relationship between input and output displacement,velocity,acceleration and time is obtained,and the rationality and feasibility of the structure design are verified.
planetary reducer;solidWorks;ADAMS;motion simulation
TH132.46
:A
:1672-545X(2017)01-0033-05
2016-10-24
2012年校级科研课题(编号:2012ZRKX0401002)
王力(1981-),男,江苏徐州人,讲师,工学硕士,主要从事机械设计与制造、CAD/CAM技术教学与研究。