视频序列中运动车辆检测和跟踪方法的研究
2017-03-25周明江王继武
周明江++王继武


摘 要:采用了一种自适应背景差分法中背景更新的改进方案对车辆进行检测,并结合迭代式阈值法和人工阈值法成功地完成目标的分割。检测出车辆后,运用改进的卡尔曼滤波器运动跟踪算法跟踪车辆。卡尔曼滤波器做运动估计可缩小特征搜索范圍;在特征提取上,采用了质心和窗口相结合的方法;在特征匹配中,使用了相似函数的概念;在更新算法中,创新性地将图像分成进入区、跟踪区和离开区3个区域。
关键词:背景提取;目标检测;卡尔曼滤波;目标跟踪
中图分类号:U495 文献标识码:A DOI:10.15913/j.cnki.kjycx.2017.04.076
随着社会经济的不断发展,整个社会对交通运输的需求不断增大,但同时也引发了交通事故、环境污染等一系列问题,智能交通系统(Intelligent Transportation System,ITS)也就应运而生了。车辆检测系统作为智能交通系统中“先进交通管理系统ATMS”的子系统,是智能交通系统的基础。车辆视频检测技术比传统的微波检测器、环行线圈检测器等模拟类技术具有明显的优势,因而成为研究的热点。
1 图像预处理
在车辆视频检测与跟综中,对图像的预处理尤为重要,它直接关系到后续车辆检测与跟踪的精度。
1.1 图像灰度化
实际中,一般的图像传感器都采用彩色摄像机。这使得图像数据量很大,影响处理速度。当光线较弱时,灰度图像的清晰度高于彩色图形,因此有必要把彩色图像转化为灰度图像。
1.2 图像灰度修正
图像灰度修正可使图像动态处理范围扩大,图案更清晰。常用的图像灰度修正有直接灰度变换和直方图修正。仿真结果表明,在本课题中,直接灰度变换的效果要好于直方图修正,因此本文采用前者来进行后续实验。
1.3 图像噪声去除
由于图像噪声会严重影响图像清晰度,因此有必要进行去噪处理。常用的去噪方法有平滑线性滤波法、加权平均法、中值滤波法和低通滤波法。仿真结果表明,平滑线性滤波的去噪效果最佳,因而被用于对车辆图像去噪。
1.4 阈值分割
在得到车辆图像的差分图像后,需对它进行阈值分割,以便得到确切的运动目标。常用的阈值分割方法有人工阈值法、自动阈值法、分水岭算法。其中,自动阈值法又包含迭代式阈值选择法、Otsu阈值选择法等。仿真比较了上述各种方法的性能,结果显示以迭代式阈值法的效果最佳,因此本实验中采用这一方法。
2 运动车辆的检测
2.1 背景差分法的不足
背景差分法虽然原理简单,运算量小,分割结果比帧差法要完整,但它存在2个不足:①背景差分法要求静态的交通场景,但在繁忙的交通路段,直接通过视频图像抓取无车的静态场景较为困难。②由于交通信息采集系统置于室外,而室外的交通静态场景会受到天气、光照条件的影响,导致当前背景模型与实际背景模型偏差较大。这将直接影响车辆的检测精度。
下面将分别讨论这2个问题。
2.2 背景差分法的改进
背景差分法的改进,就是基于自适应背景差分的运动目标检测。
2.2.1 初始理想背景的获取
背景差分法要求静态的交通场景。本文使用了统计平均法来合成相对真实的静态交通场景。其思想在于,由于道路上车辆的多样性,有的车辆亮度值比路面亮度值高,有的车辆亮度值比路面亮度值低,因此从统计学角度看,由车辆经过而引起的变化在长时间内可忽略,因而可以采用对连续多帧图像进行统计平均来合成初始理想背景,公式如下:
(1)
式(1)中:Bk为背景图像;N为图像帧数(理论上应使用150~200张图像);fk为第k帧序列图像。
2.2.2 自适应背景更新
本文采用了如下方案对背景进行更新。
首先对累积的N(N≥100)帧视频图像取平均,得到当前
初始背景以启动算法。
然后计算当前输入图像与当前背景之差,令Ik(x,y)和Bk(x,y)分别表示当前输入图像和当前背景,得到差值图像Dk(x,y),再经二值化得到二值图像BWk(x,y):
(2)
上式中所有对应运动车辆的像素值为1,其他像素值为0.
最后在BWk(x,y)=1的位置处,说明该点处于运动车辆区域,则维持当前背景;最后在BWk(x,y)=0的位置处,说明该点对应于背景区域,没有车辆出现,应按如下公式进行背景更新:
(3)
更新后,Bk+1(x,y)即作为新的当前背景图像而与下一帧图像差分,后续帧的背景更新与此类似。在实际中,α取为经验值,在0.75~0.95之间。本文选取α=0.85对背景图像进行动态更新。
2.3 阈值分割方案的改进
上文曾提到采用迭代式阈值法对车辆差分图像进行分割,以得到准确的车辆区域,但笔者在实验中发现,如果能结合人工法初步确定阈值大小,再用迭代法对图像进行分割,不仅可以降低设定阈值的盲目性,还可以较大程度地减少迭代次数,利于实时处理。本文正是采用了两者相结合的方法。
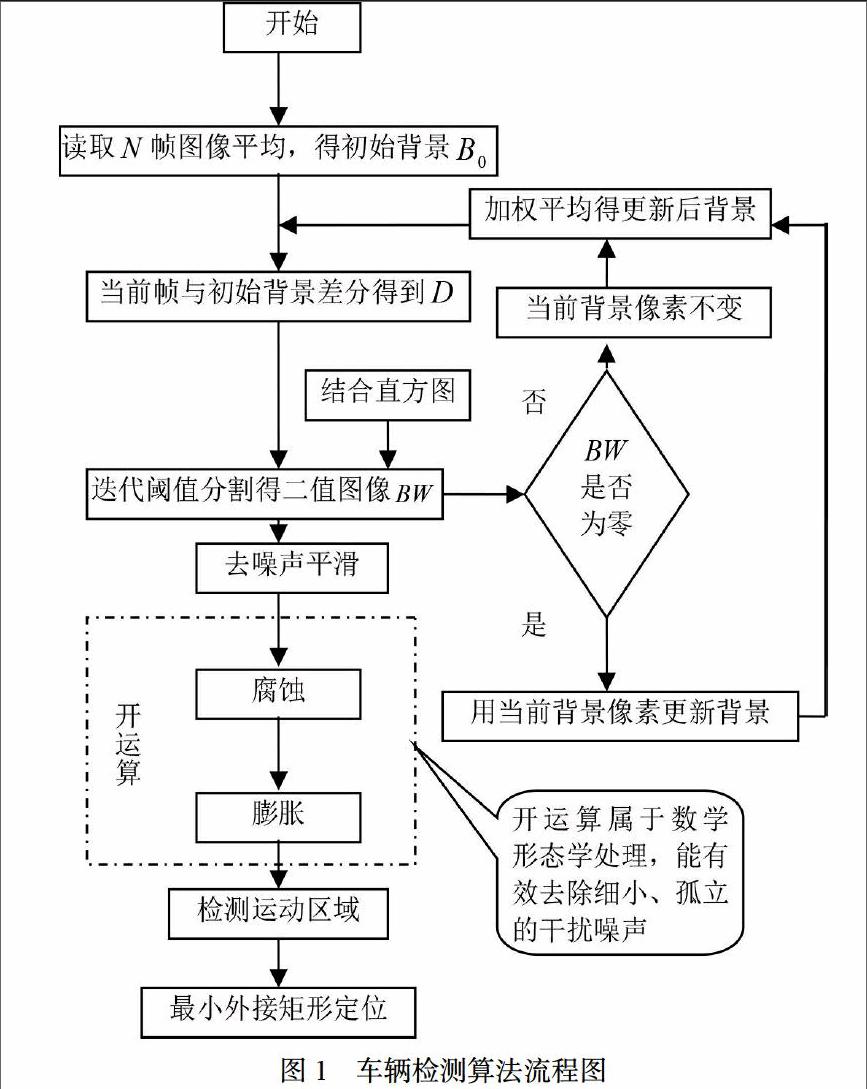
2.4 运动目标检测算法流程和实验效果
图1为车辆检测算法流程。
上述检测算法大致可以分为背景提取、背景更新、图像处理、运动目标检测4个步骤,前面所讲到的模块都在流程图中得到了体现。该算法的实验效果如图2.由仿真结果可知,该算法能准确检测出车辆,精度较高,且可满足实时处理的要求。
3 运动车辆的跟踪
3.1 卡尔曼滤波器原理
卡尔曼滤波利用反馈控制系统估计运动状态;滤波器估计某一时间的状态,并获得该状态的预测。它分成预测和修正2部分。预测公式负责利用当前的状态和错误协方差估计得到先验估计;而修正公式负责反馈部分,它将新的观测和先验估计一起考虑,从而获得后验估计。卡尔曼滤波算法的描述如图3所示。
3.2 卡尔曼滤波跟踪算法的改进
本文采用二阶卡尔曼滤波器为目标运动模型来预测车辆的位置,并在常用卡尔曼滤波跟踪算法的基础上加以改进,得到如下算法,它分为4个子模块。
3.2.1 特征计算
根据分割后的车辆区域计算出运动车辆的特征值,比如质心、跟踪窗口等。
