基于双目视觉机器人自定位与动态目标定位
2017-03-16沈阳工业大学信息科学与工程学院辽宁沈阳110870
卢 洪 军(沈阳工业大学 信息科学与工程学院, 辽宁 沈阳 110870)
基于双目视觉机器人自定位与动态目标定位
卢 洪 军
(沈阳工业大学 信息科学与工程学院, 辽宁 沈阳 110870)
针对基于双目视觉自定位与动态目标定位极易受复杂环境(如噪声、机器人发生遮挡、光照变化等)的干扰导致移动机器人定位精度低的问题,提出基于HSV颜色模型特征准确分割出人工路标,根据视差原理确定机器人位置.同时提出一种双目机器人基于Harris算子实现在复杂环境下对动态目标精确定位的方法,利用帧间差分法将运动目标检测出来,采用Harris算子在该运动目标上提取特征点,并获得视差值,从而精确的计算出运动目标的位置.实验结果表明,利用该方法进行自定位与目标定位能够克服外界干扰,具有较强的适应性,且算法的实时性好.
双目视觉; 目标定位; Harris算子; 帧间差分法; HSV模型
20世纪末,对目标定位技术主要有基于红外线的定位技术、基于超声波的定位技术和基于频射识别技术等[1].近年来,由于图像处理和计算机视觉的飞速发展,机器视觉的研究越来越受到广大专家和学者的青睐[2].双目立体视觉是机器视觉的一个重要分支,能够直接模仿人类双眼处理外界环境[3],可以代替人类完成危险的工作(如深海探测、火灾救援、核泄漏监测等)[4].而基于双目立体视觉对动态目标检测与定位也是机器视觉领域备受关注的前沿课题之一[5].双目立体视觉定位主要分为六个步骤[6]:①图像获取;②图像预处理;③摄像机标定;④特征点提取;⑤特征点的立体匹配获取视差值;⑥基于视差原理实现机器人定位.特征点提取和立体匹配是实现机器人定位的关键环节.通常的方法是依靠目标的形状、颜色等特征检测目标,并以运动物体的形心或中心作为特征点[7].该方法虽然计算简单,但极易受噪声干扰,只选择一个点作为特征点,一旦该特征点发生遮挡或光照变化等,都会严重影响定位精度.
1977年,Moravec提出根据图像的灰度变化来提取图像角点,称为Moravec角点[8].该方法计算相对简单,但对于处于边缘上的点会存在误检,也极易受光照变化的影响.SIFT特征点[9]和CenSurE特征点[10]虽然对尺度、亮度变化不敏感,但在弱纹理等复杂情况下难以提取稳定的特征点,算法复杂度高,计算时间较长.不满足移动机器人对实时性的要求.
针对以上缺陷,本文首先利用帧间差分法检测出运动目标,然后在运动目标上基于Harris算法提取多个特征点来实现移动机器人在复杂环境下实时的对运动目标精确定位.
机器人整体定位流程如图1所示,移动机器人首先基于HSV颜色模型空间分割出人工路标,实现机器人自定位.然后利用帧间差分法检测出运动目标,根据Harris算法在左右两幅图像上提取特征点,根据区域匹配原理获取视差值,利用视差原理即可求出运动目标的世界坐标,即完成了对运动目标的定位.

图1 机器人整体定位流程图Fig.1 Flow chart of robot overall positioning
1 目标检测
1.1 人工路标检测
(1) HSV颜色模型.RGB色彩空间分别以红色、绿色、蓝色为三原色,通过适当的搭配可以合成成千上万种颜色,是一种常见的颜色表示法.但是RGB色彩空间与人眼的感知差异大,其空间的相似不代表实际颜色的相似.为了能够更准确分割出人工路标,本文采用HSV色彩空间颜色模型,如图2所示.RGB颜色空间转化到HSV色彩空间只是一个简单的非线性变换,计算简单.HSV模型中H代表色调,S代表饱和度,并且独立于亮度信息V.色调H代表颜色信息,取值范围为0~180°,对其设定阈值可以区分不同颜色的路标;饱和度S表示颜色中掺杂白色的程度,取值范围为0~1,S越大,颜色越深;亮度V表示颜色的明暗程度,取值范围为0~1,V越大,物体亮度越高.

图2 HSV色彩空间模型Fig.2 HSV color space model
(2) 基于颜色特征提取人工路标.由于本文是在室内环境下对移动机器人定位,所以本文设计的人工路标是由红黄蓝三种颜色组成的矩形纸板.如图3a所示为左摄像机拍摄到的带有人工路标的室内环境.根据HSV颜色模型对H、S、V三个分量进行阈值设置即可分割出人工路标,如图3b所示.然后利用图像处理中的形态学操作对分割出的路标进行完善使其效果最佳,如图3c所示.图3d为获取人工路标的中心点,利用视差原理即可得到当前帧机器人的位置.
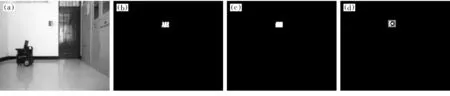
图3 人工路标分割提取结果示意图Fig.3 Schematic diagram of segmentation and extraction results of artificial landmark
1.2 帧间差分法
帧间差分法[11]的思想是对一段连续视频的相邻两帧进行差分运算,从差分运算的结果中得到运动目标的轮廓.该算法的优点是实现简单,对光照变化不敏感,稳定性好.适用于多目标或背景变化较快的场合.图4为在室内环境下用帧间差分法检测到运动物体.

图4 帧间差分法检测运动目标Fig.4 Detection of moving object with frame differential method
结果显示,帧间差分法能够有效的将运动目标检测出来.
2 运动目标定位
2.1 双目立体视觉测距原理
双目立体视觉的视差原理[12]是利用两台摄像机从两个视点观察同一景物,以获取在不同视角下的感知图像,通过计算空间点在两幅图像中的视差来获取目标物体的三维坐标.
2.2 Harris角点检测
Harris角点[13]是在Moravec角点的基础进行改进的算法. Harris算子是用高斯函数代替二值窗口函数, 对离中心点越远的像素赋予越小的权重, 以减少噪声的影响. 高斯函数如式(1)所示.
Moravec算子只考虑了四个方向的像素值,Harris算子则用Taylor展开式去近似任意方向.图像I(x,y)平移(Δx,Δy)可以一阶近似为
在图像I(u,v)中,像点(u,v)平移(Δx,Δy)后的自相关函数为
将式(2)代入式(3)可得:
其中M如下所示:
根据式(5)中矩阵M的特征值可以近似的表示函数C(x,y)的变化特征.矩阵M的特征值需要考虑以下三种情况,如图5所示.

图5 Harris角点检测示意图Fig.5 Schematic diagram of Harris corner detection
(1) 如果矩阵M的两个特征值都比较小,则表征图像灰度变化函数C(x,y)的值也较小,就说明该像素点的邻域内灰度差值不大,图像较平滑,无角点.
(2) 如果矩阵M的两个特征值一个较大,一个较小,说明该像素点的曲率也是如此,则该点的窗口区域处于一条边界,无角点.
(3) 如果矩阵M的两个特征值都比较大,则图像灰度变化的自相关函数值也较大,该点的窗函数沿任意方向都将引起灰度的剧烈变化,该点即为角点.
根据这一准则,只要计算行列式的特征值就可以检测图像中的哪些点是角点.Harris提出角点的响应函数:
det(M)为行列式的值,trace(M)为行列式的迹.而k根据Harris的建议一般取0.04~0.06之间.若Harris角点响应大于阈值,则被认为是角点.Harris角点的生成只涉及到一阶导数,所以该角点对噪声影响、光照变化引起的灰度值变化都不敏感,是一种比较稳定的特征提取算子.
3 实验仿真
3.1 实验环境
本文使用的机器人是由北京博创兴盛技术有限公司开发的自主移动机器人旅行家Ⅱ号,如图6所示.该机器人上安装了由加拿大Point Grey Research公司生产的Bumblebee2双目摄像机,其性能参数如表1所示.

图6 旅行家Ⅱ号机器人Fig.6 Robot Voyager Ⅱ

表1 Bumblebee2双目摄像机性能参数Table 1 Performance parameters for Bumblebee2 binocular camera
3.2 传统移动机器人对运动目标定位
实验环境为一间办公室,装有双目摄像机Bumblebee2的移动机器人为工作机器人,用于检测运动目标.将另一台机器人视为运动目标,运动速度为0.1 m/s.传统的方法是提取运动目标的中心点,获取视差值,从而给运动目标定位.
传统方法仅获取图像中的一个点作为立体匹配的特征点,当该点受到环境的干扰时定位精度会受到极大的影响,图7为传统方法提取运动目标中心点.表2为传统方法对运动目标定位的实验数据,表3为改变光照后传统方法移动机器人对运动目标定位的实验数据.可以得出传统方法机器人定位误差相对较大,一旦光照发生改变,对运动物体定位误差会更加严重.

图7 传统方法检测运动目标示意图Fig.7 Schematic diagram of detection for traditional method of moving target

表2 传统方法对运动物体定位的实验数据Table 2 Experiment data of traditional method for positioning of moving objects

表3 改变光照后传统方法对运动物体定位的实验数据Table 3 Experiment data of the position of moving objects after changing light
3.3 基于Harris算子机器人对运动目标定位
针对传统方法定位精度不足,极易受外界环境的干扰的问题,决定采用基于Harris角点特征提取,即在相机获得的左右两幅图像上基于Harris算子提取多对特征点,如图8所示.表4、表5为基于Harris方法机器人对运动目标定位的实验数据,可以得出基于该方法对运动目标定位误差很小,相对误差降低到1%左右,当光照发生变化时也能实现对运动目标精确定位.

图8 基于Harris角点检测运动目标示意图Fig.8 Schematic diagram of moving object detection based on Harris corner detection

表5 改变光照后基于Harris算子对运动物体定位的实验数据Table 5 Experimental data of moving objects localization based on Harris operator after changing illumination
最后将每一帧的两幅图像根据区域匹配原理[14]和极限束准则找到正确的匹配点,排出易受噪声干扰的点,从而得到视差值,即可准确的对运动目标定位.
4 结 论
(1) 本文研究了机器人基于双目立体视觉实现自定位与对运动目标定位,充分利用双目视差原理,并结合Harris算法和帧间差分法来实现运动目标的精确定位.从仿真结果可以看出,提取多个特征点可以避免只用一个点易受干扰的不足,实现更精确的运动目标定位.
(2) 虽然本文在运动目标上提取多个特征点,有效的克服了传统方法的不足.但还存在问题需要改进.首先,需要找到一种更快更准确的特征点立体匹配算法;其次,本文只是将每一帧图像得到的多个视差值做平均值处理,如何有效的将多个视差值融合也是对运动目标精确定位的关键.
[1] 李艳. 双视频目标定位技术[J]. 沈阳大学学报(自然科学版), 2016,28(4):302-305. (LI Y. Dual video target location technology[J]. Journal of Shenyang University(Natural Science), 2016,28(4):302-305.)
[2] 李天健. 基于机器人视觉的汽车零配件表面缺陷检测算法研究与实现[J]. 沈阳大学学报(自然科学版), 2013,25(6):476-480. (LI T J. Research and implementation of auto parts surface defect detection algorithm bases on robot visio[J]. Journal of Shenyang University (Natural Science), 2013,25(6):476-480.)
[3] 杜宇. 三维重建中双目立体视觉关键技术的研究[D]. 哈尔滨:哈尔滨理工大学, 2014:1-5. (DU Y. Research on key technology of binocular stereo vision in three-dimensional reconstruction[D]. Harbin:Harbin University of Science and Technology, 2004:1-5.)
[4] 余俊. 基于双目视觉的机器人目标检测与控制研究[D]. 北京:北京交通大学, 2011:1-4. (YU J. Research on target detection and robot control based on binocular vision[D]. Beijing: Beijing Jiaotong University, 2011:1-4.)
[5] DESOUZA G N, KAK A C. Vision for mobile robot navigation: A survey[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002,24(2): 237-267.
[6] 高栋栋. 基于双目立体视觉定位和识别技术的研究[D]. 秦皇岛:燕山大学, 2013:9-11. (GAO D D. Research on recognizing and locating binocular stereo vision technology[D]. Qinhuangdao:Yanshan University, 2013:9-11)
[7] 崔宝侠,栾婷婷,张弛,等. 基于双目视觉的移动机器人运动目标检测与定位[J]. 沈阳工业大学学报, 2016,38(4):421-427. (CUI B X, LUAN T T, ZHANG C, et al. Moving object detection and positioning of robot based on binocular vision[J]. Journal of Shenyang University of Technology, 2016,38(4):421-427.)
[8] 邓国栋. 基于多尺度特征的双目立体视觉目标定位[D]. 哈尔滨:哈尔滨工业大学, 2012: 21-22. (DENG G D. Object location of binocular stereo vision base on multi-scale feature[D]. Harbin: Harbin Institute of Technology, 2012:21-22.)
[9] LOWE D G. Distinctive image feature from scale-invariant key point[J]. International Journal of Computer Vision, 2004,60(2):91-110.
[10] KONOLIGE K, AGRAWAL M, SOLA J. Large-scale visual odometry for rough terrain[C]∥Robotics Research: The 13thInternational Symposium ISRR, 2011,66:201-212.
[11] 熊英. 基于背景和帧间差分法的运动目标提取[J]. 计算机时代, 2014(3):38-41. (XIONG Y. Moving object extraction based on background difference and frame difference method[J]. Computer Era, 2014(3):38-41.)
[12] 林琳. 机器人双目视觉定位技术研究[D]. 西安:西安电子科技大学, 2009:8-10. (LIN L. The research of visual positioning technology on the binocular robot[D]. Xi’an: Xi'an Electronic and Science University, 2009:8-10.)
[13] 张从鹏,魏学光. 基于Harris角点的矩形检测[J]. 光学精密工程, 2014,22(8):2259-2266. (ZHANG C P, WEI X G. Rectangle detection base on Harris corner[J]. Optics and Precision Engineering, 2014,22(8):2259-2266.)
[14] 罗桂娥. 双目立体视觉深度感知与三维重建若干问题研究[D]. 长沙:中南大学, 2012:48-53. (LUO G E. Some issues of depth perception and three dimension reconstruction from binocular stereo vision[D]. Changsha: Central South University, 2012:48-53.)
【责任编辑: 赵 炬】
Self Localization and Dynamic Target Localization of Robot Based on Binocular Vision
LuHongjun
(School of Information Science and Engineering, Shenyang University of Technology, Shenyang 110870, China)
Aiming at the fact that, the mobile robot based on binocular vision is very easy to be disturbed by the complex environment, such as the influence of noise, illumination change and the occlusion of the robot, which will seriously affect the positioning accuracy of the self localization and the moving objects, the color feature of the HSV model is proposed to accurately segment the artificial landmarks, and the robot position is determined according to the principle of parallax. A method was proposed based on Harris operator which is accurate to the position of a moving object in a complex environment. The dynamic object is detected by the frame difference method. Harris operator was used to extract the feature points on the moving objects, so as to obtain the disparity value, and then to calculate the position of the moving objects. The experimental results show that the self localization and target localization can overcome the external disturbance and have strong adaptability by using this method. The algorithm has good real-time performance.
binocular vision; object location; Harris operator; frame differential method; HSV model
2016-10-31
国家自然科学基金资助项目(60695054); 辽宁省高等学校优秀科技人才支持计划(LR2015045).
卢洪军(1991-),男,辽宁营口人,沈阳工业大学硕士研究生.
2095-5456(2017)01-0037-06
TP 391.4
A
