平行仿真技术在指控系统中的应用构想
2017-03-15窦林涛周玉芳
窦林涛,初 阳,周玉芳,刘 志
(江苏自动化研究所,江苏 连云港 222061)
平行仿真技术在指控系统中的应用构想
窦林涛,初 阳,周玉芳,刘 志
(江苏自动化研究所,江苏 连云港 222061)
针对提高指控系统作战筹划与快速辅助决策能力问题,提出结合平行仿真技术将仿真嵌入到指控系统,利用仿真支持复杂作战筹划,甚至正在进行的军事行动。研究了国内外平行仿真技术在作战指挥系统中的应用概况,以及对指控系统的影响,在此基础上提出了一种基于平行仿真的指控系统框架,研究了相关的关键技术,为未来指控系统的建设提供方法和技术上的启发及借鉴。
平行仿真;作战方案推演;在线辅助决策;指挥控制
信息化战争中,战争节奏的加快对战场指挥员的快速决策能力提出了更高的要求。如何辅助战场指挥员及时了解战场态势的演变,实现快速决策,是对指控装备建设提出的新挑战,其表现为以下两个方面:
1)作战筹划对嵌入式仿真技术的需求
现代海军作战是以信息化为基本特征的海、潜、空、岸、天、电磁多维一体的联合作战,与传统作战有较大不同,其作战规模和战场空间更大,作战兵力和指挥、任务体系更加复杂,要求将多元作战力量、多维战场空间、多种行动样式、各类保障系统等各种要素综合运用起来,发挥最大的作战效能,因此,作战行动计划将更加复杂,作战过程将更加难以预测。传统沙盘推演、图上推演方法已无法满足对作战计划分析评估的需求,需要在现有作战指挥系统中引入仿真技术,嵌入作战计划推演评估系统,提高海军作战计划辅助决策能力。
2)不确定战场环境对平行仿真技术的需求
海上作战一般会制定详细周密的作战计划。然而,现代战场局势瞬息万变,快速变化的战场局势常常在作战计划执行之前就使该计划失去了时效性。指挥员要根据实时变化的战场态势,快速修正作战计划,必须要求作战计划推演能够及时、快捷,与作战过程保持一致,实现实时平行推演。
1 基本概念
面向海战的嵌入式/平行仿真方法是研究作战过程中根据海战场实时情况对作战计划进行模拟推演的仿真技术,通过仿真推演辅助指挥员对当前战场情况的发展趋势进行预判,以及时调整和优选作战方案,快速制定作战计划,解决辅助指挥决策及时性的问题。
“嵌入式”是指将仿真系统无缝嵌入到实装作战指挥控制系统中,使仿真系统与实装指控进行信息、资源共享,通过仿真系统对非线性问题的强大求解能力辅助指挥员进行作战筹划、作战计划分析等。
“平行”是指作战过程中作战仿真模拟系统与实际作战同步运行,仿真系统从实际作战中获取及时真实的战场数据,并不断变更仿真方向,更新仿真状态,通过仿真系统的实时运行能力快速预测未来战场态势,并反馈给作战指挥系统,辅助指挥员进行作战指挥决策,进而影响实际作战。
2 国内外研究概况和发展趋势
2.1 国外情况
2.1.1 嵌入式仿真技术成为作战筹划的关键技术
美军计划系统的整体架构,是上自国家安全委员会、下至战术分队的金字塔结构,包括战略计划系统、战役计划系统、战斗计划系统,如图1所示。
美军已把仿真技术嵌入到各级作战计划制定系统中,对各级作战计划分别进行推演分析评估,辅助作战人员发现问题,逐步完善,提高作战计划的可行性,典型系统如战区级的仿真系统“战区级联合作战模拟系统(JTLS)”、战役层的作战分析系统“兵力结构效能仿真系统(4ACES)”、任务级作战仿真系统“扩展防空仿真系统(EADSIM)”、“下一代”先进兵力SAF系统(OneSAF)等[1]。

图1 美军联合作战计划制定体系
1)战区级联合作战模拟系统(JTLS)
战区级联合作战模拟系统(Joint Theater Level Simulation, JTLS)是一个交互式、多方参与的作战推演系统,已嵌入到美军战役作战计划系统中,装备于各战区级、战役级指挥所,可用于陆、海、空等作战环境于一体的联合作战行动评估、联合作战计划分析、备选军事战略评定、应急计划和联合战术的分析制定等[2]。目前,系统已应用于“果敢勇士”系列作战演练、"Ultimate Endeavor"、"Keen Edge"、"Dynamic Action"、"USMC B1ock3CPX"、"Cobra Gold"、"Yildiz" (土耳其)、"Matador"和"Burning Harmony"等演习活动,2003年,美国将JTLS出售给台湾,成为台湾每年进行 “汉光兵棋推演”的平台。该系统具有以下特点:
①具有规范化的与实装系统互操作接口
系统在开发之初就制定了一系列与实装进行信息交换的接口、模型、规范,包含数据库交互规范、人机交互接口规范、信息传输交互规范、作战模型规范等,并开发了一系列信息交互工具。
②具有战区级作战样式和作战要素仿真能力
系统能够模拟空中预警和控制系统(AWACS)、电子战(EC)、反雷达攻击机(WW)、防御型防空、地(水)面攻击、近距离空中支援(GAS)、武装和非武装侦察、部队与补给品的空投、反潜战、搜索与救援(SAR)、综合防空系统(lADS)作战等作战样式,能够模拟后勤补给、火力损耗、仓促防御、防御延期、支援、核污染、化学污染、民事活动、心理、疾病等作战要素。
2)兵力结构效能仿真系统(4ACES)
兵力结构效能仿真系统(Force Architecture Capabilities Effectiveness Simulation,4ACES)是美国海军战役层次的作战分析系统,属于联合作战系统(JWARS)中的重要组成部分,已嵌入到航母编队作战系统中,并与航母编队指控系统中的任务规划系统(TAMPS)已经实现互操作。其已装备于各大舰队,主要用于战役战术行动计划分析,辅助作战决策,在伊拉克战争中得到多次应用。该系统具有以下特点:
①具有海空联合作战计划全要素仿真能力
系统具有对作战计划中组织关系、作战规则、行动过程、信息路由、作战资源、战场环境、后勤保障等要素的全面描述能力,逼真体现指挥员的立案企图和作战计划。
②具备海战场主要作战样式仿真能力
系统能够仿真推演海战场主要作战样式,包括防空反导作战、对海作战、反潜作战、对陆作战、水雷战、两栖战等常规作战样式,以及信息战、空间战等。支持战役、战术等不同层级作战推演。
3)扩展防空仿真系统(EADSIM)
扩展防空仿真系统(Extended Air Defense Simulation, EADSIM)是美军最成熟、使用最广泛的任务级嵌入式仿真系统之一,已纳入到美国空军标准的作战分析软件工具中,应用领域涵盖作战方案分析与规划、武器装备论证与评估,以及军事训练与战法研究等,在美军“沙漠盾牌”和“沙漠风暴”行动中得到应用,能够满足以C4ISR为中心的导弹战、空战、空间战以及电子战等作战样式的需求[3]。
2.1.2 平行仿真技术已成为作战辅助决策的重要手段
美军从海湾战争认识到,作战仿真不仅可以用于战前筹划,在战时更可以发挥较大作用,可以根据最新的战场态势和及时预测的敌人意图和行动,进行快速推演决策并实施相应行动。因此,美军除了将仿真嵌入指挥控制系统中实现战前作战筹划外,美国国防部高级研究计划署(DARPA)于2007年提出并着手研究“深绿(Deep Green)”计划,利用仿真技术支持正在进行的军事行动。
“深绿”通过实时仿真评估,主动生成多种合理的行动方案,形成以支持作战指挥全过程为核心的“训练与作战一体、分析与决策一体”的作战支持模式,目前支持营、团级作战,具体体系框架如图2所示[4]。

图2 “深绿”计划体系架构图
系统由“指挥员助手”人机接口系统、“水晶球”控制系统及“闪电战”仿真系统三部分组成。“指挥员助手”具有能够为指挥员提供快速生成定性的、粗略的作战计划的能力;“闪电战”是“深绿”的仿真子系统,通过快速仿真生成可能的未来态势;“水晶球”是“深绿”的控制系统,将从作战指挥系统中实时捕获当前战场态势,并利用这些态势信息更新对许多可能的未来态势的估计[5-10]。
该系统具有以下技术特点:
1)采用实时态势捕获技术,实现与作战过程保持一致的平行推演
系统将仿真系统与指挥控制系统互联,实现了仿真与实装的无缝互操作,作战过程中,仿真系统将直接从指挥控制系统获取最新态势信息、兵力资源信息,并基于最新态势和目标信息进行仿真评估。
2)采用多分支推演技术,实现多个作战行动方案(COA)并行推演
针对当前多个备用作战行动方案,进行超实时的并行仿真推演,推演过程中,不断通过辨识分支点得到不同的未来态势,并估计每种态势发生的可能性,从而使指挥员能够“透视”未来并迅速理解军事行动的展开。
3)采用预测态势估计技术,实现快速生成作战行动方案
对推演产生的预测态势总图进行管理,利用更新后的可能性指标裁剪未来态势中的部分态势,并调用草拟计划系统,辨识即将到来的决策点,并调用草拟决策行动,快速生成作战行动计划。
2.1.3 仿真系统与C4ISR系统之间已建立了互操作基础平台
C4I系统与仿真系统的互联大致经历了传统C4I系统与仿真的接口阶段,双向互操作阶段和C4I系统的嵌入式仿真阶段,如图3所示[11]。

图3 C4I与仿真系统互联
在传统接口阶段,已经实现了互操作信息以C4I系统可以识别的结构从仿真系统传送到C4I系统中,但由于C4I系统可以识别的信息结构是有限的,限制了仿真与C4I系统之间的互操作[12]。
在HLA/RTI阶段,建立了C4I与仿真之间的对象转移机制,消除了传统的接口信息结构的限制。
在嵌入式仿真阶段,美军在提供仿真与C4I系统互联的HLA之上的,同时又提出了一套公共仿真软件服务,使得在C4I系统内部就开展基于仿真的作战计划分析和战术决策,同时,建立了可靠的嵌入式仿真系统体系结构:美国国防信息基础设施公共运营环境(Defense Information Infrastructure Common Operating Environment,DII COE),如图4所示。

图4 DIICOE/C4I体系结构
除此之外,美军十分重视仿真与C4ISR互操作能力的建设,一方面新兴的OneSAF和WARSIM仿真系统正式提出了对C4I互操作性的要求,另一方面“未来作战系统”和联合指挥控制也正式提出了对仿真互操作性的要求,形成了大量的标准和模型:在公共体系结构方面,规定建模与仿真和C4I系统必须遵循DoDAF;在公共数据交换模型方面,开发了“指控信息交换数据模型(C2IEDM)”,并已经被NATO的多国互操作性计划成员采用;在公共描述语言方面,提出了“作战管理语言(BML)”、XBML、CBML,以实现作战计划与命令的标准化与自动化,从而在指控系统和仿真系统之间通用[13]。
2.2 国内情况
国内大量开展了关于大规模作战计划仿真推演技术的研究,研发了大量的作战仿真系统,但各自体系结构和建模标准独立,只能在仿真环境中运行,还无法与实装系统进行互联互通,不具备嵌入式/平行仿真能力。
2.3 发展趋势
作战仿真作为指控系统的重要支撑技术,呈现以下发展趋势:
1)从独立的作战分析应用向与实装无缝嵌入发展,其中的“无缝嵌入”主要表现:①仿真系统与实装具有协调一致的体系结构,在组成、功能、性能、运行流程等方面与实装指控协调一致;②能够共享资源,包括装备性能数据库、战术规则库、作战模型库、作战计划等[14];③具有共用的基础与支撑平台,包括操作系统、数据库系统、地理信息系统、运行支撑系统等。
2)从战前筹划应用支持向作战过程平行推演决策支持发展,其中的“平行仿真”主要表现:①实时捕获战场态势,与指控系统实现互联互通;②基于最新的战场情况,快速制定或变更作战方案;③进行大规模兵力仿真的多分支推演,通过分支点估计,预测未来态势。
3 基于嵌入式/平行仿真的指控系统框架构想
在原有指控系统功能结构的基础上,新增仿真模型引擎环境、作战计划生成环境、虚实态势处理环境三部分来构建嵌入仿真的指控系统框架。仿真模型引擎环境用以对作战计划进行快速推演,生成所有可能的预测态势;虚实态势处理管理作战计划推演所生成的预测态势总图,并通过捕获实时态势对预测态势总图进行处理;作战计划生成环境能够根据预测态势总图自动生成作战行动计划、作战指令,如图5所示。
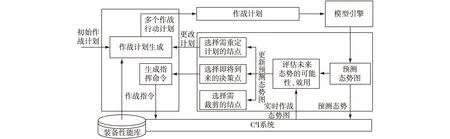
图5 嵌入式/平行仿真推演系统框架
作战计划导入到作战仿真推演系统中进行仿真推演,生成预测态势总图,并在C4I系统中显示未来的可能态势及每种态势发生的可能性,随着战场态势的变化,实时捕获战场最新态势,更新预测态势总图,包含三方面:
1)裁剪不可能发生的态势;
2)对即将发生的态势,基于决策点生成指控命令,并输出给C4I系统;
3)对需要重新评估的态势更改作战计划,继续进行仿真推演。
4 关键技术
4.1 仿真系统与实装指控互操作技术
指控系统确定的作战方案要方便地输入到辅助决策仿真系统,而且经仿真系统推演、修改、评估后的作战方案变为细粒度的作战计划,作战计划要方便地输出到指控系统执行,在线决策更要频繁地进行这种互操作。涉及的关键技术包括:指控系统与和仿真系统有一致的计划描述规范和统一的军事想定定义语言(美军采用MSDL)——数据[15]。
通过仿真系统拟制作战计划过程如图6所示。首先由军事想定编辑组件从指控系统获取战场实体信息,并根据想定数据库中的已有想定数据,由MSDL的API接口生成标准格式的MSDL文件。MSDL文件输出至仿真系统进行多方案分析评估,如果计划不能满足需求则重新拟制,如果满足则转换成相应的基于XML的作战计划文件作为C2I作战系统的计划输入。

图6 作战计划过程图
4.2 仿真与实装的虚实态势关联技术
实现与作战过程平行的作战推演仿真,关键是虚拟态势与真实态势的同步关联,只有基于真实态势的仿真推演才是有效、可信的。仿真态势是基于仿真实体生成的,在仿真系统中唯一、可识别,而实际态势是通过实装探测装备感知的,存在无法识别、冗余、缺失、重叠等各种情况,因此,如何确保仿真态势与真实态势的一致关联,是实现平行推演的关键。
从作战态势中的目标信息中提取目标的身份特征、轨迹特征信息,并与仿真态势进行映射,求解发生变化的战场态势信息,并更新仿真态势,如图7所示。
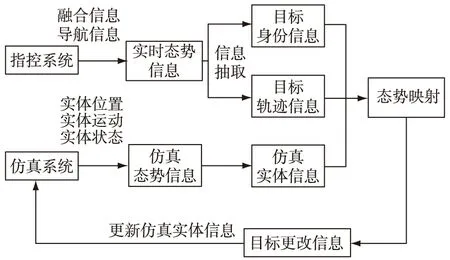
图7 态势捕获主要流程
重点是实时的作战态势与仿真态势的映射,主要从身份映射、轨迹映射两部分展开研究。身份映射是将作战态势中目标的批号、类型、属性、型号、运动介质等与仿真态势中的目标名称、实体型号进行对比,在考虑作战态势中属性和类型识别置信度的基础上,求解身份一致率:
PI=(ωiIidentify+ωcIclassical)*Pbach*Pmedium
其中ωi、ωc为权值,Iidentify、Iclassical分别为属性和类型识别置信度,由实装系统或识别仿真模块输出,Pbach、Pmedium分别为目标名称和运动介质一致率,其中Pbach、Pmedium的计算公式为
其中,c1、c2为目标运动介质或目标名称,目标运动介质包含水面、水下、空中、空间、岸上四类,目标名称为装备性能数据库中的目标标识。
轨迹映射是将作战态势中目标的当前位置、速度、航向信息及过往轨迹信息与仿真态势中的实体运动信息进行对比,在考虑位置不确定度、速度不确定度、航向不确定度及过往轨迹丢点、虚假的基础上,求解轨迹一致率。如图8所示。

图8 轨迹映射一致率示意
当仿真态势中某位置点落在作战态势中同时刻位置点不确定区域内,则认为该点是匹配的,当前点匹配并且过往点连续K点匹配,则认为两条轨迹一致。
4.3 高效仿真引擎设计技术
采用仿真手段对作战计划进行分析,对作战行动过程进行预测,就必须逼真地模拟海战场所有作战要素,如指挥结构、兵力资源、通信关系、任务计划、战术规则等,涉及的模型包含平台、传感器、武器、指控、电子战设备、导航、运动、行为等。对于嵌入实装系统的平行仿真系统,将面临着大量模型运行调度需求与仿真实时性之间的矛盾,这对仿真引擎的运行效率设计提出了更高要求。
在单线程离散事件引擎基础上,设计面向多核的并行引擎[16]。
横向为每一个线程设置一个事件管理列表,并设置独立的事件流执行处理模块,在执行事件过程中请求模型处理算法,产生新事件,并插入到相应的事件列表中,依次执行;
纵向将作战仿真推演的不同模块均匀的分配到各线程中,彼此之间通过统一的时间管理器实现时间同步,设置时间标尺处理模块,管理统一的仿真时间,只有当前事件时刻小于等于时间标尺时,事件才会被执行,如图9所示。
在对多核并行仿真引擎的设计过程中,由于多线程之间调度了统一的仿真实体,因此,如何避免各实体在调度过程中的互斥问题是引擎设计的关键[17]。采用层次调度机制,引入实体容器模块,仿真引擎调度实体容器,如图10所示。

图10 仿真调度层次概念结构图
在实体容器中引入时间排队机构,在同一刻不同线程内的事件同时请求调度某一实体对象时,必须在时间排队机构中进行排队等待,这样就可以避免两个实体请求的读写冲突,时间排队机构采用先入先出栈,如图11所示。

图11 时间排队机构示意
4.4 多分支平行仿真推演技术
现有的作战方案推演评估系统多是基于蒙特卡洛的仿真方法,通过选取种子数,随机运行大量样本,采用数理统计的方法对作战方案进行评估,从而得到当前作战方案未来最可能发生的交战结果。但在实际作战过程中,指挥员最亟需的是掌握未来战场上所有的可能交战结果及每种结果的发生概率,因此,如何在推演过程中将所有的交战结果推演出来,并给出各种交战结果的可能性是当前仿真推演系统的一个技术难点。
蒙特卡洛仿真虽然可以产生可能结果空间的样本,但不能保证充分采样空间,只能得到最有可能的推演结果,无法预测可能结果的范围及每种结果的可能性。采用定性与定量相结合的方法,研究推演分支点辨识方法,在并行仿真推演引擎的基础上,构建人在回路的多分支推演模型框架,如图12所示。

图12 人在回路的多分支推演框架
主要流程为:
1)接收作战计划;
2)推演引擎对作战计划进行初始化,并调度相应模型,产生仿真实体对象,初始化仿真事件流;
3)仿真推演开始,依据系统决策概率或人工干预点确定分支点,产生新的仿真推演事件流;
4)用先验估计评估每个分支的可能性,多个事件流并行仿真,持续仿真到每个分支直至到达终点;
5)输出每一个预测态势及其发生概率。
5 结束语
面向未来信息化战争,迫切需要指控系统辅助指挥员和参谋人员能够更好的作战决策,提供更准确的分析、预测与控制方法,从而得到更可靠的结果,有效提高决策的可靠性、灵活性和前瞻性,降低决策风险,取得更好地作战效能。面向作战的嵌入式/平行仿真是动态不确定环境下辅助决策的一种有效方法,为此,需要加强对仿真系统与实装指控的互操作技术、多分支并行仿真推演等关键技术的研究。此外,高效仿真引擎、互操作标准等相关技术的研究发展也将为系统的实现提供有效保障。未来的构想是将作战仿真系统无缝嵌入指控系统,可在线评估作战计划,并最终实现复杂作战的临机辅助决策。
[1] 黄柯棣,赵鑫业,杨山亮,等.军事分析仿真评估系统关键技术综述[J].系统仿真学报,2012,24(12):2439-2447.
[2] 唐忠,薛永奎,刘丽.美军作战仿真系统综述[J].航天电子对抗,2014,30(4):45-48.
[3] 胡晓峰,罗批,司光亚,等.战争复杂系统建模与仿真[M].北京:国防大学出版社,2005.
[4] 周云,黄教民,黄柯棣.美国“深绿”计划对指挥控制的影响[J],火力与指挥控制,2013,38(6):1-5.
[5] National Research Council of the National Academies. Defense Modeling, Simulation, and Analysis-Meeting the Challenge[R].USA: The National Academies Press, 2006.
[6] JR Surdu,K Kittka.The Deep Green Concept [C]∥Spring Simulation Multionference, Military Modeling and Simulation Symposium(MMS),14-18 April 2008,Ottawa, Canada. MSIAC Journal November 2008:4-12.
[7] 徐忠富,杨文,熊杰.美军联合红旗军演研究[J].指挥控制与仿真,2014,36(3):137-142.
[8] BAA 08-09 Deep Green Broad Agency Announcement (BAA) for Indormation Processing Technology Office (IPTO), Defense Advanced Research Projects Agency (DARPA),availableon-line: http∥www.darpa.mil/ipto/solicit/baa/BAA-08-09-PIP.pdf.
[9] J.R. Surdu, K.Kittka. Deep Green: Commander′s tool for COA′s Concept[C]. Computing, Communications and Control Technologies: CCCT 2008, Orlando, Florida.
[10]B. Surdu, K.Kittka. The Deep Green Concept[J].MSIAC Journal, 2008,3(3).
[11]刘永辉,林平.嵌入式仿真在舰艇作战系统的应用[J].军事运筹与系统工程,2010,24(3):17-19.
[12]樊世友,朱元昌,全厚德.C4I系统嵌入式仿真研究[J].火力与指挥控制,2006,31(12):68-70.
[13]NSF Workshop Report. Dynamic Data Driven ApplicationSystems [EB/OL].(2000-3-8).www.cise.nsf.gov/dddas.ApplicationsSystems[EB/OL]. http:∥www.cise.naf.gov/dddas, 2006-01-20/2007-09-08.
[14]刘建平,陈亚洲.美军建模与仿真管理特点及启示[J].指挥控制与仿真,2013,35(6):142-146.
[15]National Science Foundation Program Solicitation. DDDAS-Dynamic Data DrivenApplications Systems[EB/OL]. http:∥www.cise.naf.gov/dddas, 2006-01-20/2007-09-08.
[16]Simulation Interoperability Standards Organization: Standard for Military Scenario Definition Language(MSDL)[D].SISO-STD-007-2008, 14 October 2008.
[17]常非.美军主要推演和仿真系统模型体系与建模机制研究[J].军事运筹与系统工程,2015,29(2):75-80.
Conception of the Application of Parallel Simulation Technology in Command and Control System
DOU Lin-tao, CHU Yang, ZHOU Yu-fang, LIU Zhi
(Jiangsu Automation Research Institute, Lianyungang 222061, China)
In order to improve Command and Control (C2) system’s capability of operational plan and quick decision aid, utilizing parallel simulation technology, this paper proposes a conception of embedding simulation into C2 system and using simulation to support complex operational plan or even the ongoing military operation. This paper researches the application situation and influence of the using of Parallel simulation technology in different country’s C2 system, proposes a C2 system’s frame on the basis of Parallel simulation technology, and researches some related key technologies, attempting to provide a inspiration and reference for the construction of future C2 system.
parallel simulation; operational plan deduction; online decision aid; command and control
2016-11-09
窦林涛(1980-),男,河北唐县人,高级工程师,研究方向为系统仿真。 初 阳(1985-),男,工程师。 周玉芳(1968-),女,研究员,硕士生导师。 刘 志(1992-),男,硕士研究生。
1673-3819(2017)01-0062-08
TJ810.3+7;E917
A
10.3969/j.issn.1673-3819.2017.01.014
修回日期: 2016-11-17