异步电机V/f调速轻载振荡抑制方法研究
2017-03-09王天雷张京玲贺跃帮颜健毅
王天雷,张京玲,贺跃帮,王 柱,颜健毅
(五邑大学,江门 529020)
异步电机V/f调速轻载振荡抑制方法研究
王天雷,张京玲,贺跃帮,王 柱,颜健毅
(五邑大学,江门 529020)
针对异步电机V/f控制在空载及轻载状态出现的电流振荡现象,分析得出振荡原因在于定子无功电流分量振荡造成的电机定子磁链及电磁转矩振荡。在定子电压矢量定向坐标系中,对定子无功电流分量进行振荡抑制,电流和转速得以稳定。该方法在通用变频调速装置上由软件实现,不需要额外的硬件成本。实验结果验证所述方法的有效性,目前已应用于通用变频器产品中,取得了良好的经济效益。
异步电机;V/f控制;振荡抑制
0 引 言
目前,异步电机变频调速的控制方式有恒压频比(V/f)控制、矢量控制(VC)、直接转矩控制(DTC)、转差频率控制等方法[1]。VC控制方式虽有较高精度,但其对电机参数高度依赖,准确观测转子磁链的困难,以及矢量旋转变换的复杂性,通常需另加速度传感器,因而限制了该方法的实际应用。通用变频调速技术虽然控制精度稍差,但该方式不依赖电机参数,无需速度传感器,控制方式简单,易实现等特点[2],在实际工程中应用较为普遍。通用设备,如水泵、风机和压缩机等由于对转速精度无很高要求,在采用变频调速系统中,经常是采用V/f控制模式。据统计,目前市面大约有50%低压变频器产品采用V/f控制,其余则采用开环矢量、闭环矢量、DTC或其他控制方式[3]。由此可以看出,对通用变频调速V/f控制方式的性能进行研究改进,消除空载或轻载振荡,使其得到更广泛的应用,具有十分重要意义。
本文研究异步电机V/f控制空载或轻载振荡现象进行,对定子无功电流分量进行振荡抑制,提高了V/f调速系统的稳定性,实验结果验证所述方法的有效性。
1 V/f调速轻载振荡分析
采用PWM供电方式,交流异步电机在轻载或者空载时,往往会在一个较宽的频段产生局部运行不稳定现象。测试与分析均表明,电机运行在这段时间,出现较大的电流幅值变化和输出频率变动,即产生电流振荡。上述现象可能结果是系统因为过电流发生误报警,导致系统工作时可靠性和稳定性下降。产生振荡原因有很多,如定子电阻、转子惯量、死区时间、DC滤波电容、载波频率、系统共振频率等,比较普遍的观点是电机和变频器在能量交换过程中引起的[4-5]。
对死区效应进行补偿后,往往并不能将振荡彻底抑制。当系统产生振荡时,实时地改变相应的输出频率或电压,并通过电流形成一个负反馈系统,是一种有效方法[6]。但由于不同电机产生振荡的频率范围存在差异,从而限制了该方法适用范围。此外,该方法还可能导致控制的效果下降,系统的鲁棒性降低。文献[7]提出了一种更为精确、有效智能控制方法,但该方法实现困难,主要原因是硬件条件要求高,比软件算法较复杂,难以推广。
本文采用的方法是对电机电流进行同步坐标变换,将定子电流进行分解,直接控制影响能量交换的磁通励磁电流分量,即分解异步电机的有功电流分量和无功电流分量,抑制无功电流的振荡成份,达到较好的抑制采用V/f调速时异步电机时出现的振荡,提高系统的稳定性和鲁棒性。
2 V/f调速轻载振荡的抑制
2.1 系统稳定性方法
相关理论分析表明,空载、轻载振荡主要与无功电流振荡造成的电机定子磁链及电磁转矩振荡有关,通过抑制无功电流振荡,可以避免电机振荡[8]。文献[9]对无功电流电流振荡抑制是采用对无功电流进行闭环调节以使无功电流稳定的方法。本文采用电压补偿控制方法抑制异步电机V/f调速轻载振荡,基本思路是使无功电流稳定,使电机定子磁链稳定。具体方法是无功电流增大时减小定子电压,使无功电流减小,而无功电流减小时增大电机定子电压,使无功电流增加,保证感应电机V/f控制系统始终处于稳定运行状态。

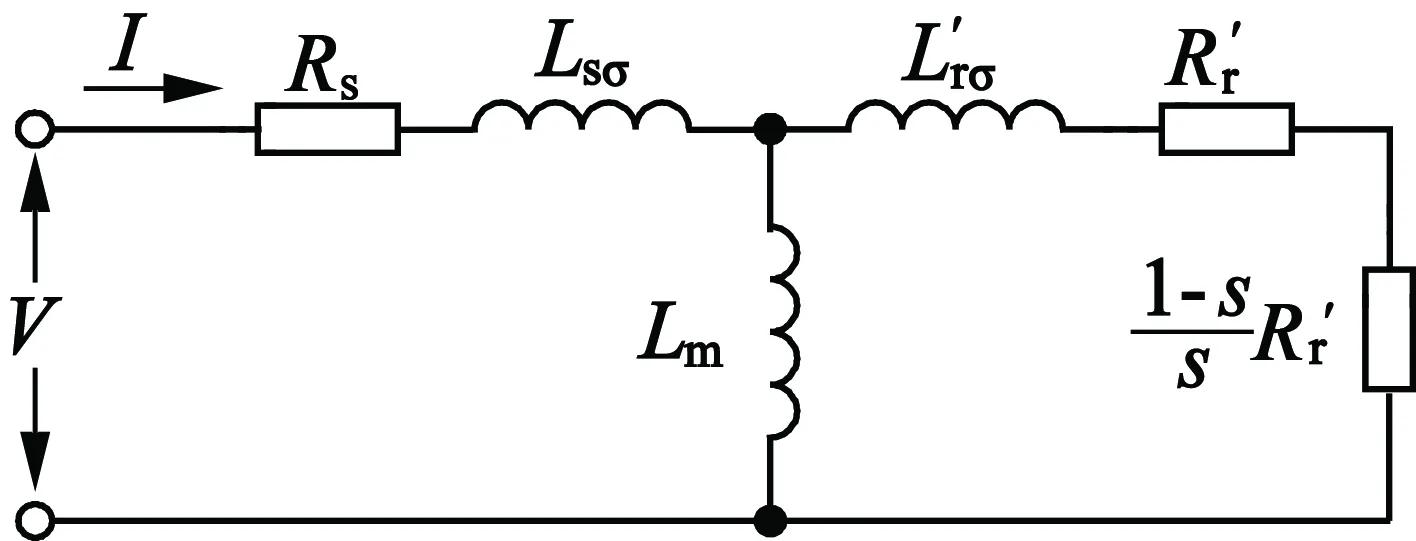
图1 异步电机稳态等效电路
由图1可以看出异步电机稳态电路呈阻感特性,定子电流可以分解为有功分量id和无功分量iq,无功分量滞后有功分量90°。在两相同步旋转d-q坐标系中分析,定义d-q坐标系的d轴按定子电压矢量V定向,在d-q坐标系下,定子矢量I滞后电压矢量V,电流矢量在d-q坐标系的两个分量id,iq分别为有功电流、无功电流,如图2所示。
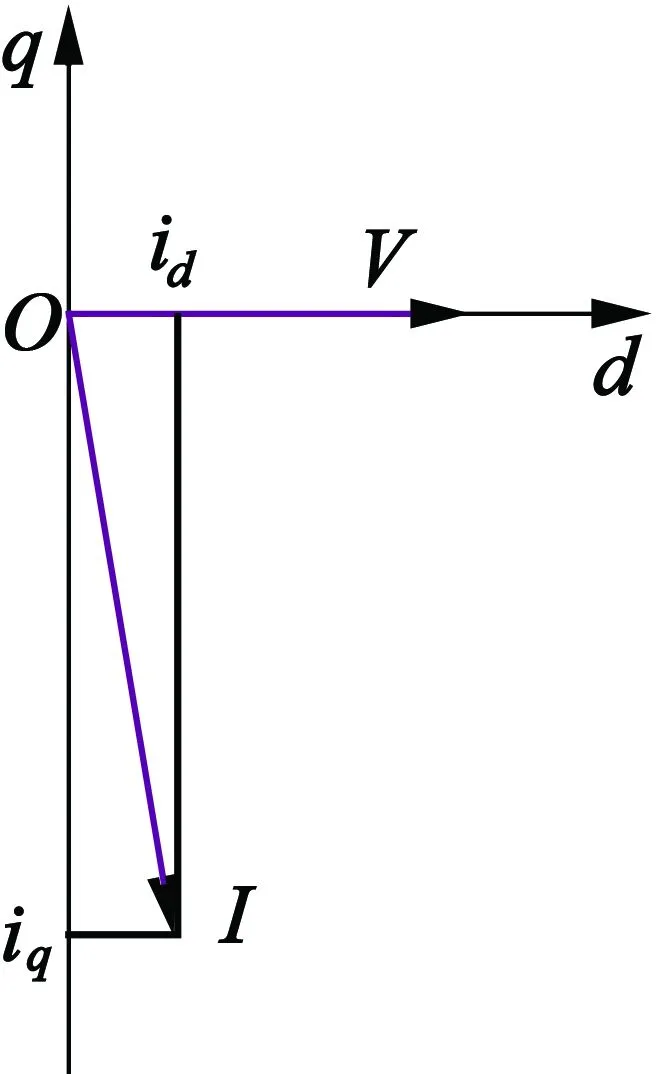
图2 定子电流矢量分解示意图
结合以上分析可知,电机稳定运行时,iq恒定,而电机振荡时,iq振荡明显。为抑制电机振荡,需提取iq的振荡成分并通过调整定子电压幅值使振荡成分衰减至0,这是通过下述式(1)和式(2)来实现的。
通过式(1)可提取iq的振荡成分Δiq。
(1)

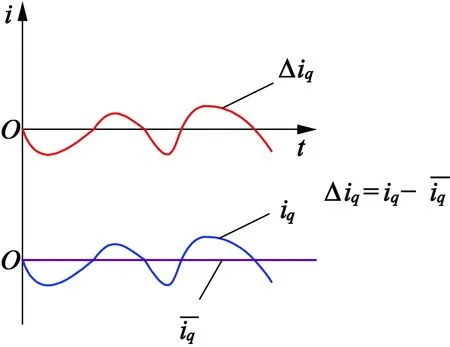
图3 无功电流振荡分量示意图
根据Δiq对定子电压幅值进行调整:
(2)
式中:V′为V/f曲线输出电压,k为振荡抑制系数。式(2)中,k>0,结合图3,在d-q坐标系中,iq<0,式(2)的调整效果使得:当iq幅值增大时(此时Δiq<0)定子电压幅值减小,使iq幅值往减小方向调整;当iq幅值减小时(此时Δiq>0)定子电压幅值增大,使iq幅值往增大方向调整。则式(2)的调整过程是稳定的,调整的结果是Δiq趋于0。
根据以上分析可以得到带振荡抑制措施的V/f调速系统,如图4所示。因V/f控制无限制起动和制动电流的功能,给定频率需经过给定积分器产生平缓的加速或减速信号;采用空间电压矢量脉冲宽度调制(SVPWM),根据定子电压矢量的幅值V和相位θ生成6路PWM信号,控制逆变器中的IGBT,完成逆变驱动。
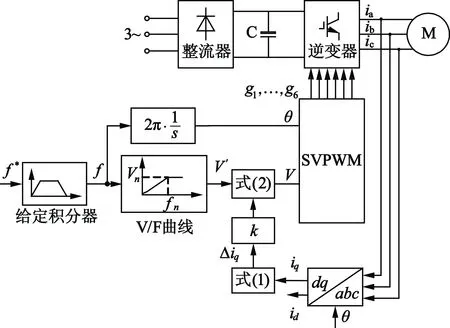
图4 稳定化的V/f调速系统框图
感应电机V/f控制系统由硬件驱动部分和软件程序部分组成,本文设计了感应电机通用变频调速系统硬件平台,该平台采用了数字电机专用芯片DSP(TMS2812)作为主控芯片,并通过软件实现了在该平台上的感应电机V/f调速控制。
2.2 硬件设计
感应电机V/f控制系统硬件主要包括主电路、DSP控制和驱动电路,此外还包括检测、保护、开关电源和外部接口电路等。采用TMS320F2812作为V/f调速系统主控芯片。该芯片有32位定点处理器,具有运算能力强和外设模块完备等特点,可使驱动控制器硬件电路的设计得以简化,提高系统实时处理能力,满足各种先进控制算法的实现。功率模块采用富士PIM模块7MBR50SB-120,该模块内含三相整流器和逆变器,用于不控整流和逆变处理。V/f调速系统硬件框图如图5所示。
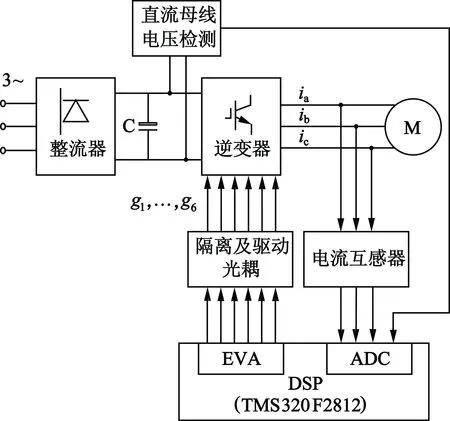
图5 V/f调速系统硬件框图
2.3 软件设计
软件设计主要包括初始化程序和定时中断程序。初始化程序对DSP事件管理器、中断向量表、I/O端口、A/D转换器等进行设置,并对变量赋初值。
本文设置TMS320F2812事件管理器EVA的定时器T1工作在连续增/减计数模式,定时周期为0.1 ms,定时器T1是EVA比较单元的时基,可输出3组6路PWM信号,在定时器T1下溢中断服务程序中执行大部分的算法程序都在这部分实现,如电流采样、V/f控制策略、SVPWM的产生等。初始化完成后使能中断进入主循环等待中断发生,定时器T1中断程序流程如图6所示。当定时器T1下溢中断到来,启动A/D转换,采样定子电流、直流母线电压等变量,根据V/f曲线,计算定子电压矢量幅值和相位,提取无功电流振荡成分,调整定子电压矢量幅值并由SVPWM(空间矢量脉宽调制)生成6路占空比,合成定子电压矢量,据此更新定时器T1的比较寄存器。
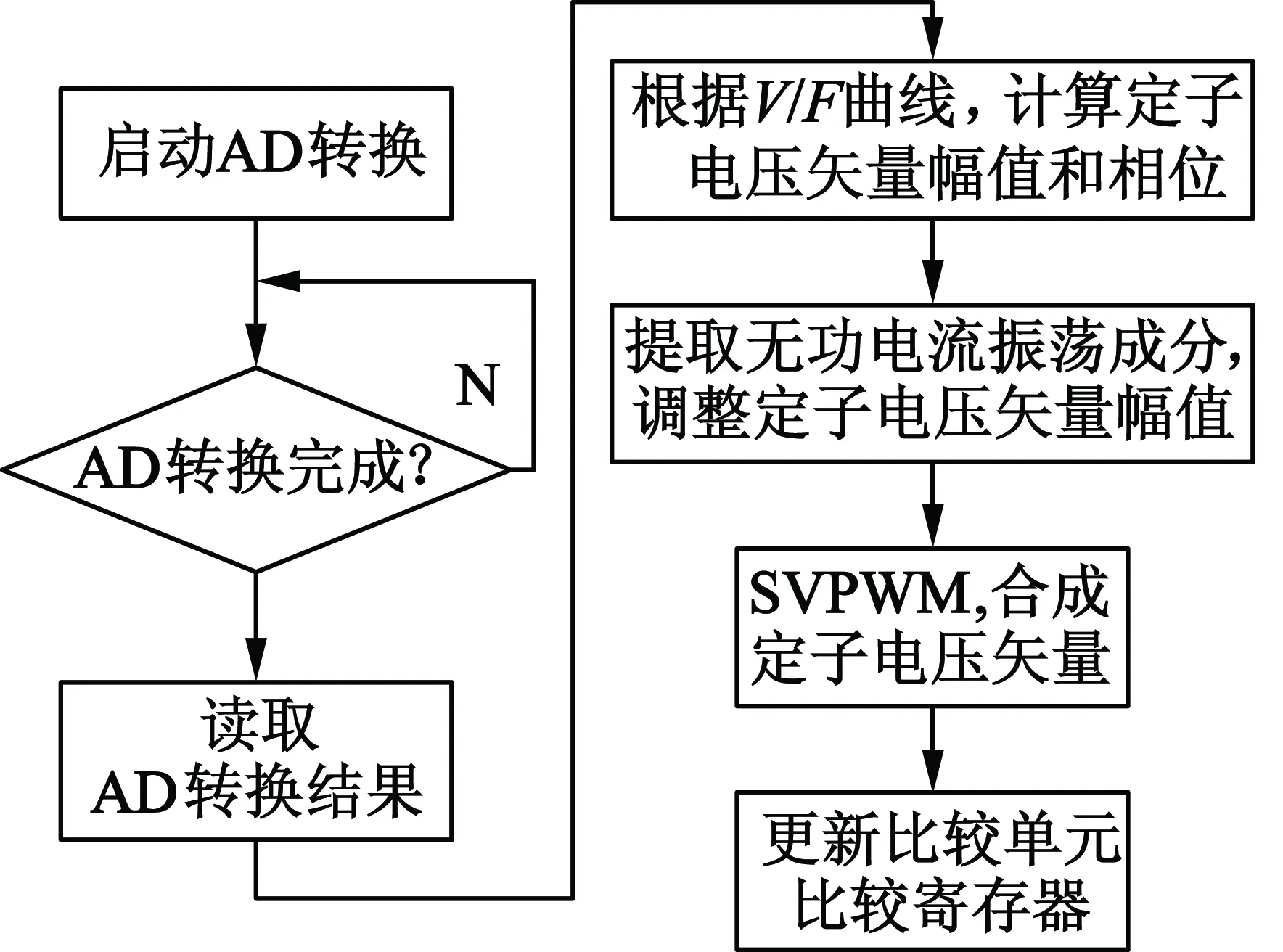
图6 定时中断程序流程图
3 实验分析
在5.5 kW的实验平台对提出的振荡抑制方法进行了验证。实验异步电机参数为:额定功率5.5 kW、额定电压330 V,额定电流13.5 A,极数4极,额定频率50 Hz。
没有采用振荡抑制措施时,实验电机空载运行,振动频段大致在18~38Hz。记录实验波形如图7~图9。图7为电机加速过程随频率上升进入振荡区,振荡逐步加剧;图8为30 Hz运行,振荡严重;图9为电机加速过程随频率上升进入稳定区,振荡消失。加入振荡抑制措施后,系统的振荡现象得到消除,如图10和图11,在整个调速区间无振荡现象,电机运行平稳。
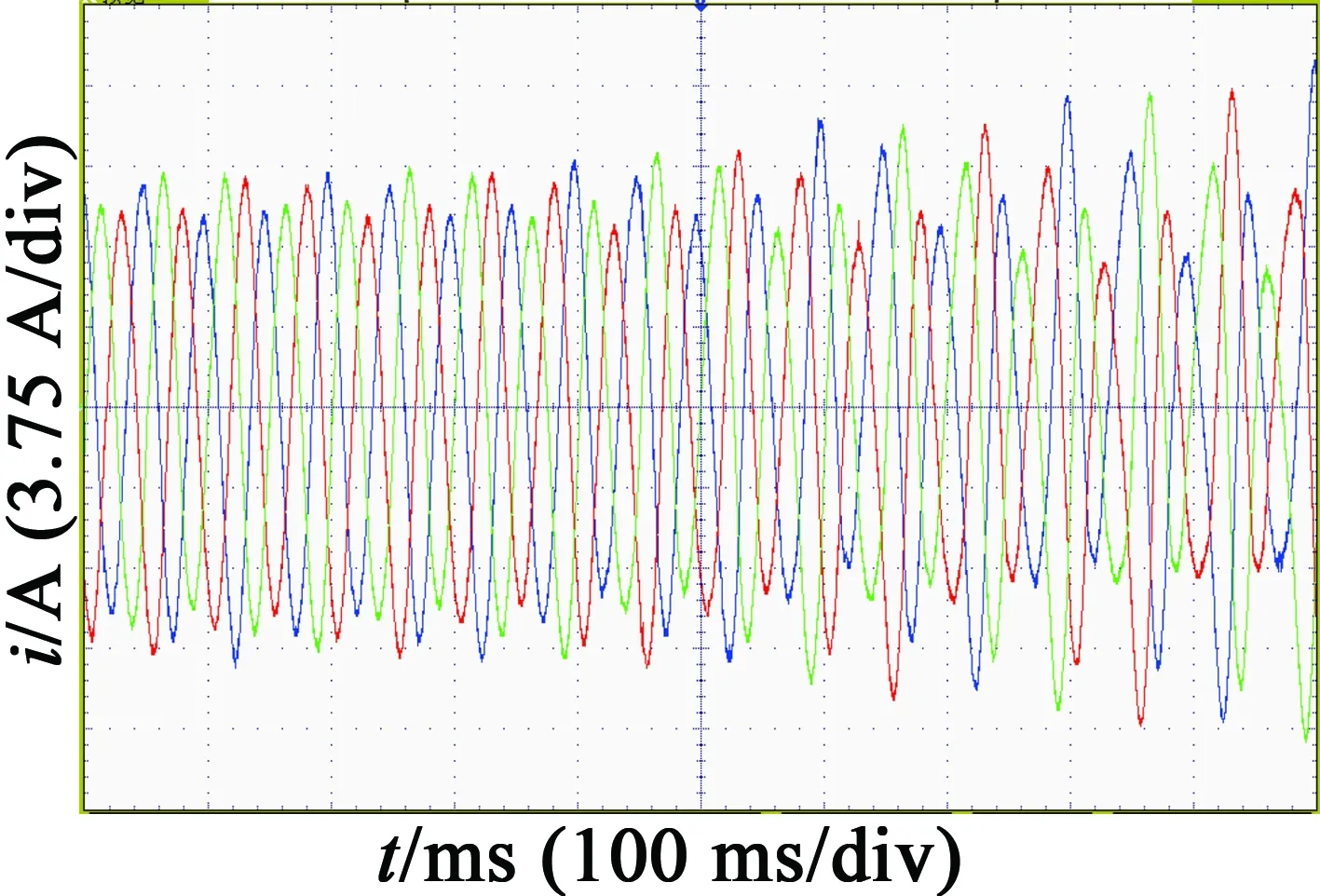
图7 无振荡抑制措施15~20 Hz加速过程截图
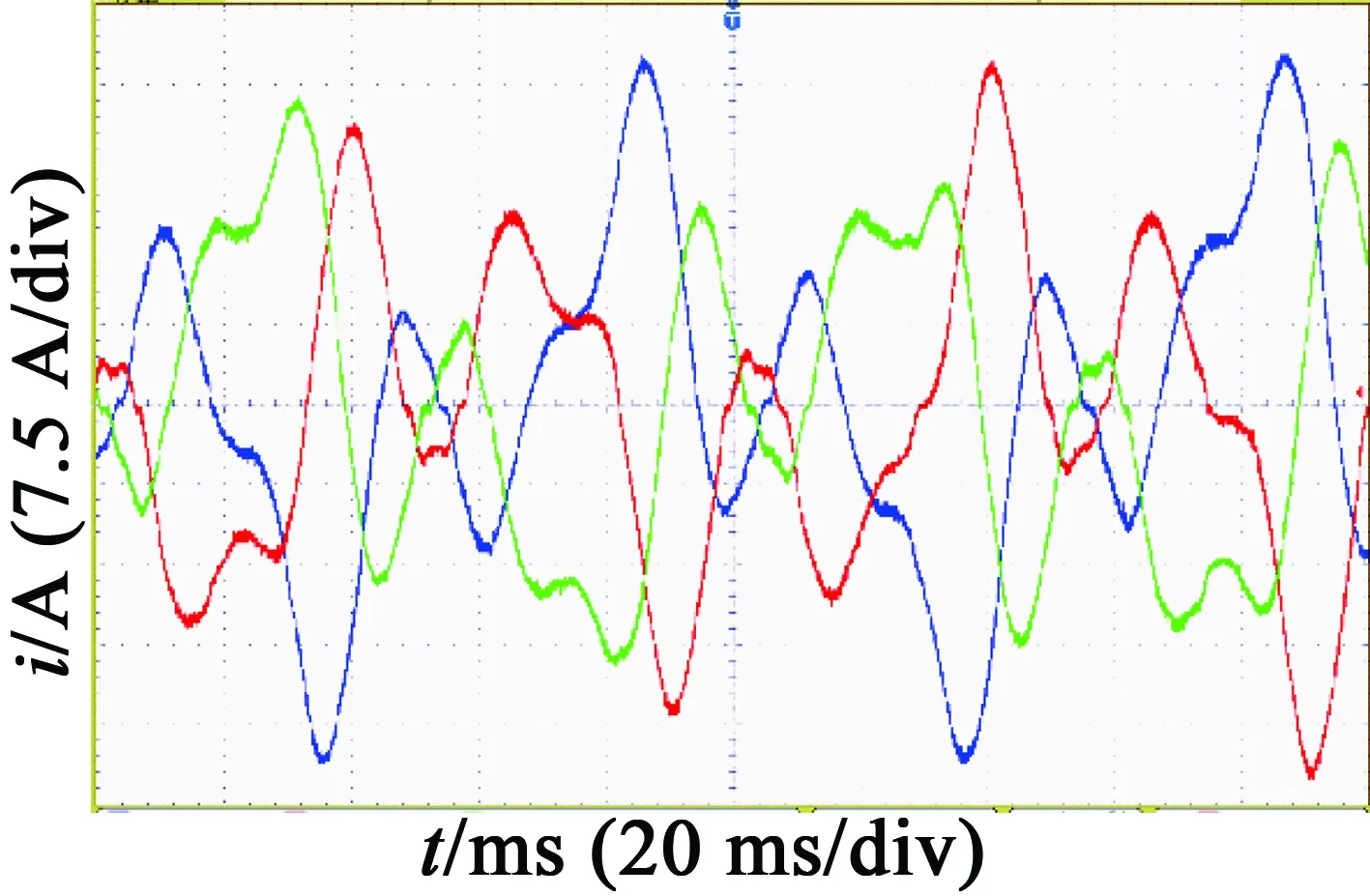
图8 无振荡抑制措施30 Hz运行截图
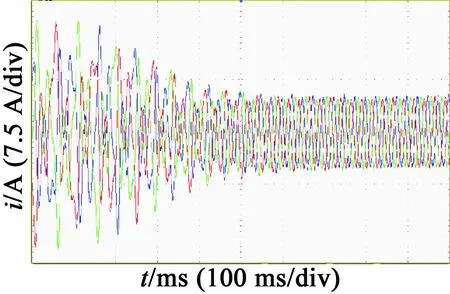
图9 无振荡抑制措施30~40 Hz加速过程截图
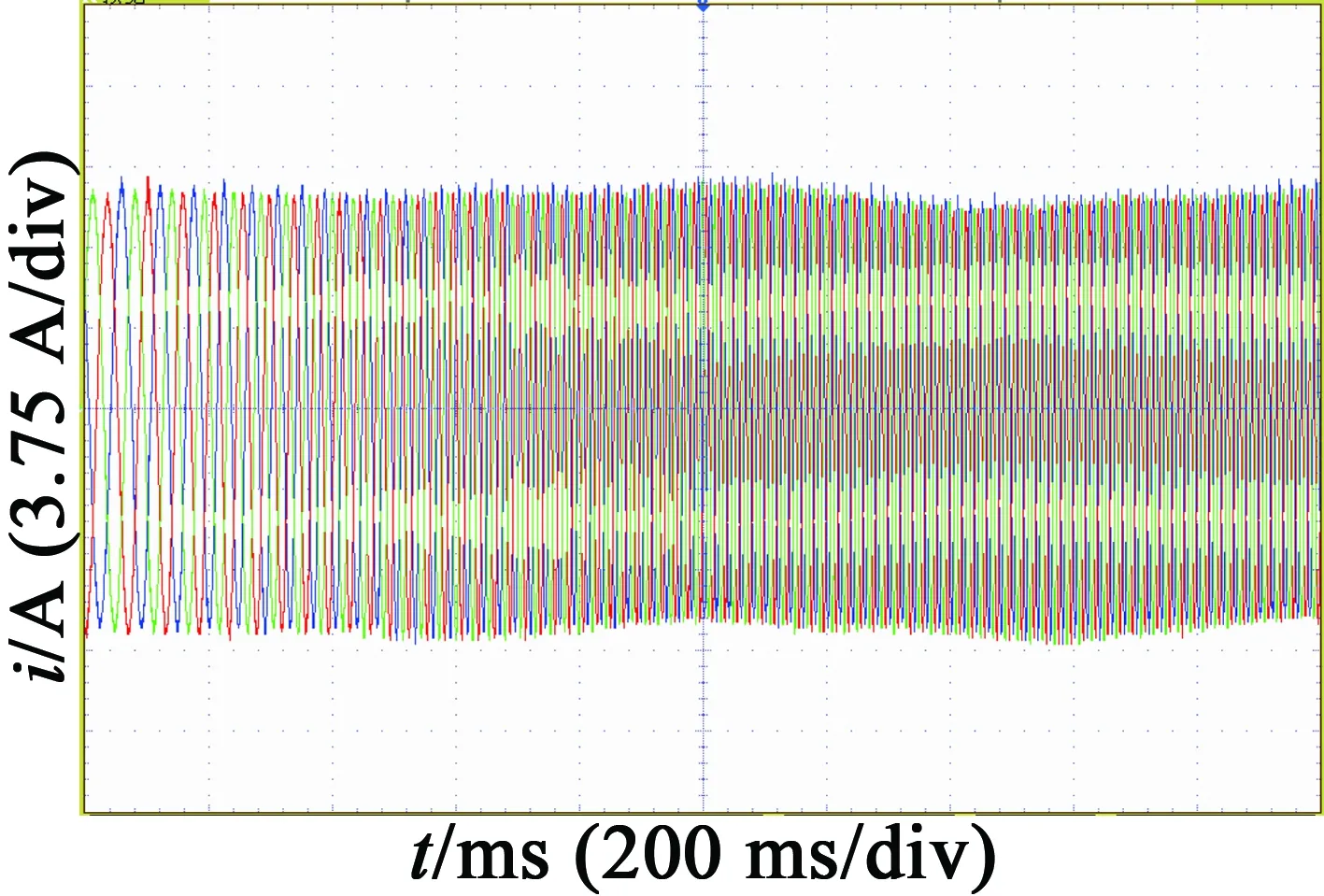
图10 有振荡抑制措施10~50 Hz加速过程截图
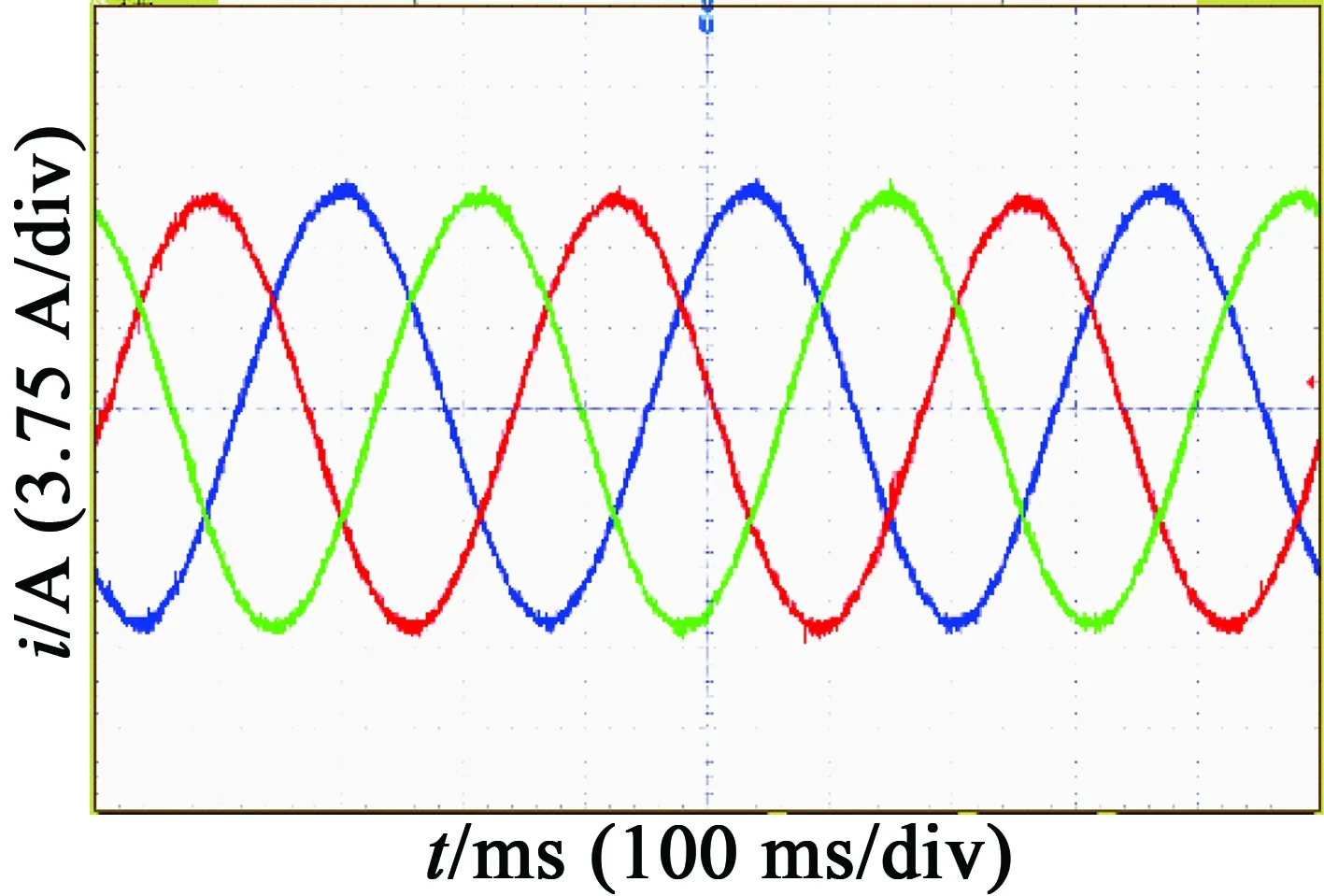
图11 有振荡抑制措施30 Hz运行截图
图7为未采用无振荡抑制措施时,实验电机在15~20 Hz加速过程,图8为无振荡抑制措施30 Hz运行,图9为无振荡抑制措施30~40 Hz加速过程,图10为采用振荡抑制措施10~50 Hz加速过程,从图中可看出加入抑制振荡方法后系统振荡能得到很好的抑制。图11为采用振荡抑制措施30 Hz运行曲线。
4 结 语
本文针对传统的异步电机采用V/f控制系统调速时出现轻载不稳定的问题,采用电压补偿控制方法,即在定子电压定向的同步旋转坐标系中,将定子电流分解为有功分量和无功分量,根据无功电流的振荡成分来调整定子电压幅值,有效地抑制了异步电机V/f调速轻载振荡现象,调速系统稳定性良好。
实验验证了本文方法的有效性,空载时,电机在整个频率段都能平稳运行。目前,本文方法已应用于通用变频器产品中,取得了良好的经济效益。
[1] 陈伯时.高动态性能交流调速系统的发展与演变(Ⅰ)——按转子磁链定向的矢量控制系统[J].电力电子,2004,2(1):33-35.
[2] 陈伯时,陈敏逊.交流调速系统[M].3版.北京:机械工业出版社.2013:64-77.
[3] 熊文凯.感应电机控制系统低速性能研究[D].哈尔滨:哈尔滨工业大学,2009.
[4] JANARDHANA IYENGAR R S,SASTRY V V.Oscillations in voltage controlled induction motor drives[C]//Proceedings of the International Conference on Power Electronics Drive Systems.IEEE,1995:123-128.
[5] 王庆义.浅谈改善变频器性能的若干技术[J].变频世界,2006(2):11-16.
[6] MUTOH N,UEDA A,SAKAI K,et al.Stabilizing control method for suppressing oscillations of induction motors driven by PWM inverters[J].IEEE Transactions on Industrial Electronics,1990,37(1):48-56.
[7] CHOI J W,SIL S K.A new compensation strategy reducing voltage/current distortion in pwm vsi systems operating with low output voltages[J]. IEEE Transactions on Industrial Application,1995,31(9):1001-1008.
[8] 王庆义,尹泉.一种改善VVVF变频调速系统稳定性方法[J].电机与控制学报,2007,11(2): 138-142.
[9] 陈伟,杨荣峰,于泳,等.新型感应电机V/f控制系统稳定性方法[J].电机与控制学报2009,13(S1):11-14.
ResearchontheMethodofV/fSpeedControlofInductionMotorwithLightLoadOscillation
WANG Tian-lei,ZHANG Jing-ling,HE Yue-bang,WANG Zhu,YAN Jian-yi
(WuyiUniversity,Jiangmen529020,China)
Accordingtothecurrentoscillationphenomenonintheno-loadandlightloadcondition,theV/fcontroloftheinductionmotorwasanalyzed,andthereasonofthestatorfluxandtheelectromagnetictorqueoscillationcausedbythestatorreactivecurrentcomponentoscillationwereanalyzed.Inthestatorvoltagevectororientedcoordinatesystem,thestatorreactivecurrentcomponentwassuppressed,andthecurrentandspeedcanbestabilized.Themethodisimplementedonlybysoftwareontheuniversalfrequencyconversiontimingdevice,anddoesnotrequireadditionalhardwarecost.Theexperimentalresultsverifytheeffectivenessofthemethod.Ithasbeenappliedinthegeneralinverterproducts,andhasachievedgoodeconomicbenefits.
inductionmotor; V/fcontrol;oscillationsuppression
2016-06-24
广东高校优秀青年创新人才培养计划(育苗工程)(2014KQNCX157);五邑大学2015年度青年科研基金项目(2015zk12)
TM
A
1004-7018(2017)01-0073-04
王天雷(1981-),男,硕士,讲师,主要研究方向为通信与信号处理、电机驱动、无损检测。
