一种微小型无人船控制系统设计及航向控制方法研究
2017-02-27张浩昱
张浩昱,刘 涛
( 哈尔滨工程大学自动化学院,哈尔滨 150001)
一种微小型无人船控制系统设计及航向控制方法研究
张浩昱,刘 涛
( 哈尔滨工程大学自动化学院,哈尔滨 150001)
无人船在保护海洋环境和开发海洋资源方面具有广泛的应用前景和市场价值;微型无人船研制成本低、机动灵活、携带方便且易于开展实验,相比常规水面无人平台有明显优势;微小型无人船不仅可以用于海洋环境监测,也可以作为海上通信中继平台,在军事应用领域也有其潜在应用价值;文章设计了一种基于ARM的微小型无人船控制系统,同时进行了详细的控制系统硬件设计和软件设计,并通过水池实验结果验证了该控制系统的有效性和实用性;此外,针对无人船航行过程中存在风浪流混合干扰的问题,结合模糊控制技术和传统的PID控制技术,提出了一种模糊PD控制算法,实现了PD控制参数的在线自适应优化调整,进行了相应的水池试验并与传统PD控制算法进行了对比分析。
ARM;无人船控制;航向控制;模糊PD控制
0 引言
无人船是一种新型的海洋运载平台,在民用和军事领域具有极其广泛的应用前景,可以进行海洋环境监测、海洋气象预报、通信中继、领海监视等工作。微型无人船研制成本低、机动灵活、携带方便且易于开展实验,相比常规水面无人平台有明显优势。其控制系统多采用模块化结构设计,易于快速集成,搭载不同的传感器就可以完成不同的工作任务。随着无人水上平台的推广以及相关定位、导航与控制技术的快速发展,越来越多的无人水上自主平台将应用于海洋监测领域[1]。
美国和以色列在无人船的研究方面一直处于领先地位。世界其它国家也积极地开展了无人船的研究。美国研制的斯巴达侦察兵无人船,采用的是模块化的结构设计,是一艘典型的高航速、高机动性、模块化的无人船。以色列的保护者号无人船,如图2所示,是由以色列拉斐尔武器发展局所开发的,船长9米,为刚性充气艇,采用喷水推进,最大航速超过30节。英国普利茅斯大学开发了无人船“Springer”号搭载了水质监测传感器,可应用于海洋环境监测。
运动控制技术研究,是无人船实现无人自主航行的关键技术之一。在无人船的航向控制方面,已有很多学者进行了相关技术的研究。国内不少学者研究了多种不同智能控制及其混合控制方法,如哈尔滨工程大学朱齐丹提出了一种将反步法和非线性滑模观测器相结合的控制方法,并且通过仿真数据证明了算法的有效性[2]。孟浩等人提出了一种基于神经网络参考模型的航向智能自适应算法,设计了神经网络模糊控制器,并通过仿真实验验证了控制算法的有效性[3],但并未开展实际航行测试。一些欧美发达国家的学者将基于PID及其改进控制算法应用到实际应用中,目前对无人船的实际控制研究处于领先地位。意大利热那亚大学设计了基于PD控制算法的航向控制器,之后结合PI控制技术和高增益控制技术提出了一种新的航向航速控制算法,并进行了相应的航行实验[4-5]。为了实现无人船在复杂海况下的自主航向控制,本文设计了一种无人船的模糊PD航向控制算法,并通过水池试验验证了该算法的有效性和可靠性。
1 无人船的自主运动控制系统平台设计
本文所研制的微小型无人船,船体采用玻璃钢工艺加工完成,尺寸为1 600×480×460 mm,配备了水循环冷却系统,设计时速可达25 km/h。船载控制系统以ARM控制器为核心,通过串口与三维电子罗盘、GPS模块、无线电模块通信,采用锂电池作为供电电源;基于μCOS-II嵌入式操作系统实现指令的传输、获取无人船的姿态信息、控制舵机角度和无刷直流电机转速的功能,实现无人船的自主航向控制。采用LabWindows/CVI设计了岸基监控系统,实现了无人船位置、航向、速度等信息的实时监控以及控制参数、航向、航速等指令的实时发送等功能。
1.1 船载控制系统硬件设计
选用意法半导体公司生产的32位微控制器STM32F103ZET6作为船载控制系统的核心处理模块,主频为72 MHz,片内FLASH容量为512k,具有多达80个IO、4个通用定时器、RS232等大量接口资源;采用DCM302B三维电子罗盘测量无人船航向、横摇、纵摇姿态信息,航向测量精度可达0.5°;无线通讯部分采用SX1278的无线电通讯模块,最大通讯距离为5 km,可以实现无线电信息收发,提供岸基与无人船的信息交互;螺旋桨采用直流无刷电机驱动,采用PWM接口进行调速控制;舵机的控制也是PWM脉宽调制接口控制;控制系统的电源部分设计采用了控制用电和动力用电分开的原则,控制用电供电电压为5 V,电池容量5 000 mAh,动力用电为16.8 V,电池容量30 000 mAh,续航时间为20-30分钟。控制系统的硬件系统组成见图1所示。

图1 无人船控制系统原理图
1.2 船载控制系统软件设计
船载控制系统采用基于μCOS-II的嵌入式操作系统实现多任务软件模块并行工作,包括航向控制任务模块、航迹控制任务模块、电子罗盘输入任务模块、无线电指令输入任务模块、GPS输入任务模块等。
本文在STM32控制器上移植了μCOS-II的嵌入式操作系统,并实现了船载控制系统的多任务调度。软件部分具体设计主要包括利用定时器定时读取三维电子罗盘角度信息,设定每隔200 ms读取一次当前的航向;控制IO引脚发出脉宽调制信号,脉宽调制信号通过定时器产生,实现舵机的偏转和对无刷直流电机的调速控制;与无线电模块进行数据通讯,无线电指令的收发主要是基于串口操作,船载控制系统通过串口中断函数接收数据,并根据事先设定的数据传输协议控制无人船进行不同的动作;航向控制软件算法通过读取电子罗盘的输出信息,与预期航向相比较得出偏差信号及其变化率,软件算法实现的模糊控制器以偏差信号及其变化率为输入,PD控制参数为输出,实现了对PD控制器控制参数的优化,优化后的无人船航向控制自适应模糊PD控制器产生控制信号,通过改变PWM波的占空比来改变舵偏,最终实现了无人船的航向控制。
1.3 岸基监测界面设计
岸基监测系统主要包括无线电模块和岸上计算机,采用LabWindows/CVI软件设计开发了监测界面,具有指令收发功能,实时显示无人船的经纬度地理坐标、航向和航速等信息,能够远程操控无人船,还能够修改控制参数。
2 无人船的模糊PD航向控制
无人船航向参数自整定模糊PD控制器可以实现PD控制器控制参数对各时刻航向角偏差、航向角偏差变化率的自适应功能。利用模糊控制器实现对PD控制器各控制参数的优化,最终得到了无人船航向控制的自适应模糊PD控制器,系统结构见图2所示。

图2 自适应模糊PD控制器
上图中模糊控制器部分的设计中以无人船航向偏差及偏差变化率作为模糊控制器的输入变量;模糊隶属度函数的选择为最常见的三角型隶属度函数;解模糊化的方法采用面积中心平均法。由于需要同时控制改变PD控制器的两个参数变量Kp和Kd,因此需要设计两个模糊控制器来实现同时控制两个参数的变化,各参数的控制调整规则参见下表1、表2[7],其中第一行代表e,第一列代表de/dt。

表1 Kp模糊控制规则表

表2 Kd模糊控制规则表
3 水池航行实验
系统集成、调试完成后,在哈尔滨工程大学综合试验水池实现了微小型无人船的航向控制试验,水池长50 m,宽20 m,无人船螺旋桨转速控制在1 000 r/min。无人船可以将当前航向数据通过无线电传送到岸上监测系统,岸上计算机保存航向数据,绘制相关曲线。水池实验场景如图3所示,无人艇船模型如图4所示。

图3 无人船水池实验图

图4 无人船模型图
本文采用传统PD控制和模糊PD控制两种控制方法实现了无人船的航向控制,实验数据曲线如图5~6所示,两种控制方法试验结果数据对比如图7~8所示。
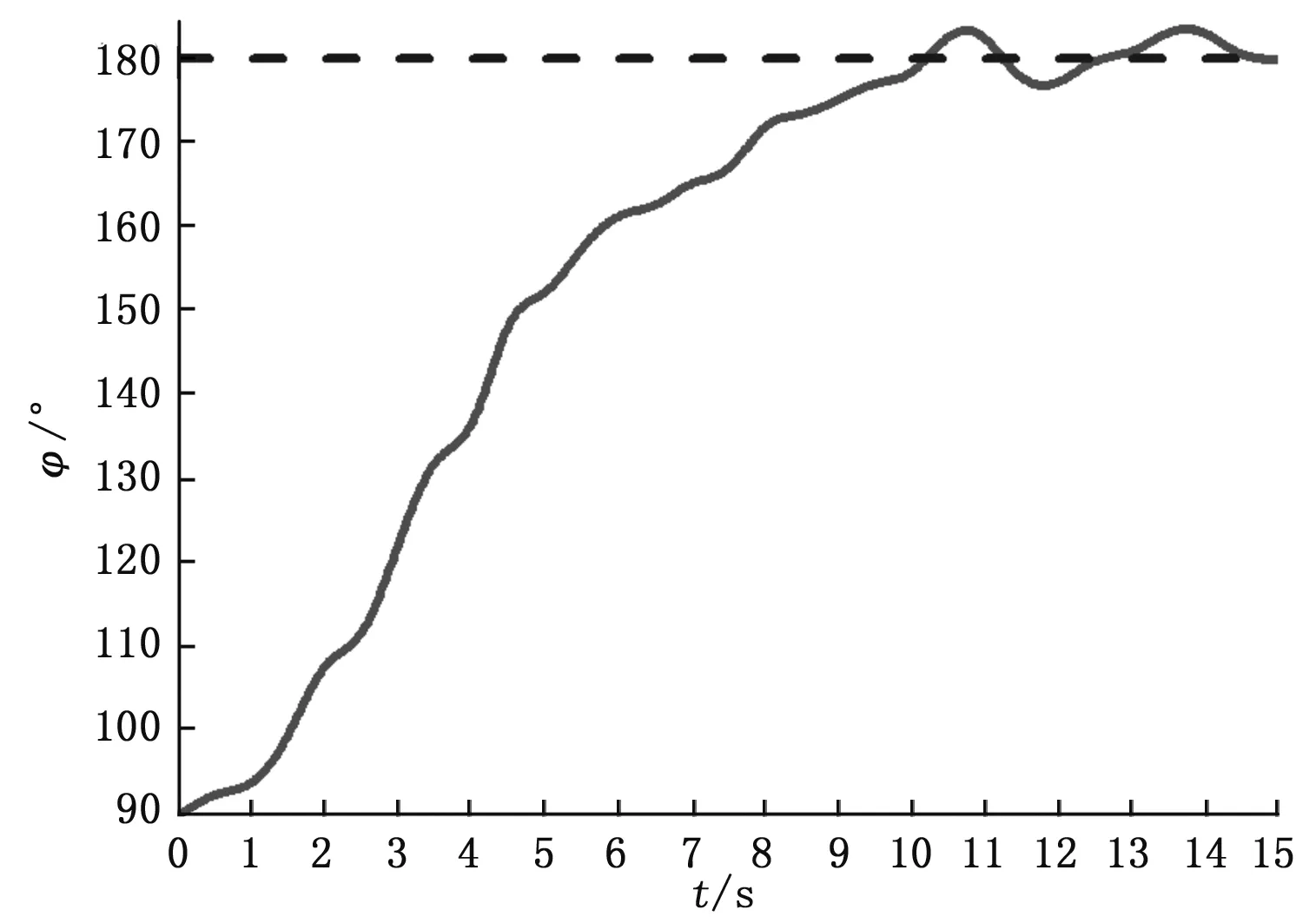
图5 模糊PD控制器90°-180°航向控制实验

图6 传统PD控制器60°-90°航向控制实验

图7 60°航向控制试验结果对图

图8 80°航向控制试验结果对比图
从实验结果可以看出,两种控制方法都能够实现无人船的航向控制。从控制效果来看,传统PD控制器响应速度较慢,超调量较大,可以将航向精度控制在5°以内,当航向稳定时,受外界干扰影响较大;利用本文所设计的模糊PD控制器响应速度较快,超调量较小,可以将航向控制精度控制在2°以内,当航向稳定时,受外界干扰影响较小。这是由于模糊PD控制器可以根据当前的误差及其变化率自主改变PD控制器的控制参数,在实验中遇到干扰时可以更好地对当前干扰做出反应。因此,本文所提出的模糊PD控制器具有优良的航向控制能力,并且具有抗干扰功能。
4 结语
本文介绍了一种基于ARM控制器的微小型无人船控制系统的软硬件设计,设计了一种模糊PD航向控制方法,进行了相应实艇航行试验,验证了算法的有效性和可靠性。所开发的岸基监控系统可通过无线传输模块实现控制指令收发,实时显示无人船的航向信息,进行自主控制、远程遥控。水池实验结果表明,所设计的模糊PD航向控制算法相比广泛采用的PD控制算法,航向控制精度更高,控制稳定性更好。
[1] 天 鹰. 从无人水面艇的军事应用看中国海军无人水面艇的发展前景[J]. 舰载武器, 2012(2): 28-34.
[2] 朱齐丹, 周 芳, 赵国良, 等. 基于反步法和滑模观测器的船舶航向控制[J]. 华中科技大学学报, 2009, 37(4): 122-125.
[3] 孟 浩, 赵国良. 基于神经网络参考模型的船舶航向智能自适应控制系统[J]. 哈尔滨工程大学学报, 2003, 24(4): 395-399.
[4] Bibuli M, Bruzzone G, Caccia M, et al. Seil-oscillation based identification and heading control for unmanned surface vehicles[A]. RAAD 2008 17th International Workshop on Robotics in Alpe-Adria-Danube Region[C]. Ancona, Italy, September, 2008,15-17: 1-6.
[5] Bibuli M, Bruzzone G, Caccia M, et al. Swarm-based path-following for cooperative unmanned surface vehicles[J]. Institution of Mechanical Engineers Part M-Journal of Engineering for the Maritime Environment, 2014, 228(2): 192-207.
[6] 廖煜雷. 无人艇的非线性运动控制方法研究[D]. 哈尔滨:哈尔滨工程大学, 2012.
[7] 董早鹏,无人艇运动模糊控制技术研究[D]. 哈尔滨:哈尔滨工程大学, 2013.
[8] 梁冠辉. 基于ARM的无人船控制系统[D]. 青岛:国家海洋局第一海洋研究所, 2011.
[9] 金久才, 张 杰, 邵 峰, 等. 一种海洋环境监测无人船系统及其海洋应用[J]. 海岸工程, 2015, 34(3): 87-92.
[10] Caccia M, Bono R, Bruzzone G. Design and exploitation of an autonomous surface, vessel for the study of sea-air interactions[A]. 2005 IEEE International Conference on Robotics and Automation[C]. Barcelona, Spain, 2005: 3582-3587.
[11] Desa E, Maurya P K, Pereira A, et al. A small autonomous surface vehicle for ocean color remote sensing[J]. IEEE Journal of Oceanic Engineering, 2007, 32(2): 353-364.
[12] Naeem W, Sutton R, Chudley J. Modelling and control of an unmanned surface vehicle for environmental monitoring[A]. UKACC International Control Conference 2006[C]. Glasgow, Scotland, 2006: 1-6.
[13] 刘金琨. 先进PID控制Matlab仿真(2版)[M]. 北京: 电子工业出版社, 2005.
Miniature Unmanned Ship Control System Design and Research of Heading Control Methods
Zhang Haoyu,Liu Tao
(College of Automation, Harbin Engineering University, Harbin 150001, China)
Unmanned ships have broad application prospects and market value for protecting the marine environment and developing the marine resources. Miniature unmanned ships have the advantages of low cost, flexible mobility, easy to carry and easy to carry out experiments; Micro unmanned ship can not only be used for marine environmental monitoring, but also become a communication relay platform. This paper has designed a kind of micro unmanned ship control system based on ARM, at the same time designed the control system hardware and software, and verify the validity and practicability of the control system by the tank experiment results. In addition, for unmanned ship heading control in the presence of wind, wave and current hybrid interference, a fuzzy PD control algorithm has been put forward, combined with the fuzzy control technology and traditional PID control technology; the PD control parameters online adaptive optimization and adjustment has been realized; the corresponding pool experiments and the traditional PD control algorithm comparative analysis have been finished.
ARM;unmanned ship control; heading control;fuzzy PD control
2016-08-10;
2016-09-13。
国家自然科学基金项目(51409059);黑龙江省自然科学基金资助项目(F201342)。
张浩昱 (1994-),男,江苏盐城人,主要从事嵌入式控制系统方向的研究。
1671-4598(2017)01-0088-03
10.16526/j.cnki.11-4762/tp.2017.01.025
TP3
A
