立式扭矩传感器磁场与输出电压分析
2017-02-18郭艳玲常子凡那少聃
郭艳玲, 常子凡, 那少聃
立式扭矩传感器磁场与输出电压分析
郭艳玲, 常子凡, 那少聃
(东北林业大学 机电工程学院,黑龙江 哈尔滨 150040)
扭矩传感器是汽车电动助力转向(EPS)系统中的核心部件,基于电磁感应原理提出了一种新型扭矩传感器。介绍了传感器的结构和工作原理,运用电磁场理论推导了立式扭矩传感器的磁场计算公式和输出电压数学模型。采用Ansoft Maxwell对传感器的电磁感应系统进行了建模仿真,仿真结果表明:气隙磁场强度沿圆周方向呈类似方波分布,输出电压信号类似于正弦曲线,磁场分布和输出电压的仿真结果与理论计算吻合。
扭矩传感器; 电磁感应; 数学建模; Ansoft Maxwell仿真
0 引 言
扭矩传感器是电动助力转向系统(EPS)的关键部件之一。EPS控制器根据接收到的扭矩传感器信号控制助力执行装置产生合适的转向助力。国内外现有的EPS采用的扭矩传感器主要有日本JTEKY公司的霍尔式传感器、韩国KIA公司的电位计式传感器以及Hella公司的电磁感应式传感器[1]。其中电磁感应式扭矩传感器,以其结构简单,不受磁场和电信号干扰,不需要额外的磁性材料,不需要温度补偿[1]等优点,成为EPS扭矩传感器主要发展方向之一。
由于Hella公司的扭矩传感器采用的平面电磁感应结构,由一个PCB定子和两个花瓣状冲压金属片转子上下布置组成[2],占用空间较大。同时为了避免内部磁场间的干扰,设计上下结构不同,加工工艺较复杂。基于以上考虑,本文采用柔性电路板(FPC)技术,设计一种扭矩传感器将原传感器圆形平面结构变成同轴立体圆柱结构,从而有效减小传感器整体体积,同时避免了传感器内部可能存在的相互干扰[3],获得国家实用新型专利(CN201520963725.0)。
1 传感器的结构与工作原理
立体传感器整体为“内转子+FPC”结构,模型见图1。内部转子分为上下转子齿片,结构尺寸完全一致,分别固定在EPS输入轴和输出轴上。齿片和空隙交替均匀分布,设转子齿片数量为N。外部FPC中间为螺旋励磁绕组,两端为接收绕组,且励磁绕组作为外部电路的电感元件与处理电路共同形成闭合回路。接收绕组如图2所示,为2N个菱形正反回路构成的环形结构。外部FPC连同处理电路安装在专用的骨架和支座上。当对励磁绕组通入高频正弦励磁电流时,由于涡流耦合作用,在转子片中会产生较大的同频率的涡电流[4],这些涡电流会产生磁场,其方向与原磁场方向相反,对原磁场起到削弱作用,即去磁效应[5],导致气隙间的磁场分布不在均匀。因此随着转子的移动,接收绕组正反回路磁通量变化将引起接收绕组中感应电压幅值发生相应的变化[2]。当转子齿片转过一个正反回路,输出感应电压相位从0°~360°变化,得到转子转角与感应电压幅值的关系。通过测量扭杆两横截面的相对扭转角,并利用材料力学中转角与扭矩成正比的原理可以计算得到扭杆所受扭矩[5]。
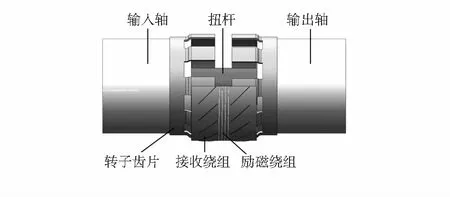
图1 立体磁电式扭矩传感器半剖结构图
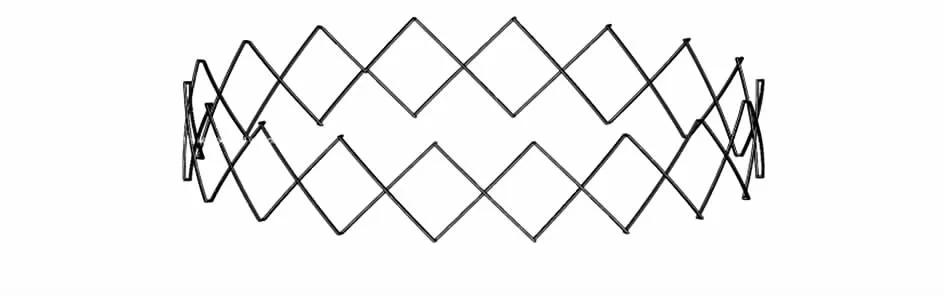
图2 接收绕组绕线样式
2 传感器磁场系统的理论计算
为了便于建立扭矩传感器中励磁绕组磁场及涡流场的数学模型,现假定如下:
1)转子齿片安装在EPS转向管柱上,在此忽略传感器系统内各部分电磁感应与金属管柱以及与金属管柱紧配合的转子圆环的耦合现象,即将转子片简化为沿圆周方向均布的矩形齿片。
2)由于接收绕组产生的感生电压和远小于励磁电压,因此,忽略感生电流对励磁磁场和涡流磁场的影响。
3)由转子齿片涡电流产生磁通只分布在转子齿片对应的矩形区域内,不考虑漏磁情况。
4)由于转子齿片与接收绕组间气隙较小,可以认为在有效气隙内磁场强度沿径向均匀分布。
2.1 励磁绕组磁场计算
(1)
由于励磁绕组为无铁芯FPC印刷绕组,且R≫L,所以,由励磁电流所产生的时变磁场主要集中在绕组周围,不适合使用磁路计算方法。在圆柱三维磁场中,只有沿径向磁场Br对转子齿片的的电磁感应现象有贡献,即转子齿片电涡流主要由Br产生。考虑到AnsoftMaxwell对其进行三维仿真时通常采用直角坐标系进行描述,所以,对传感器建立以轴线为z轴的直角坐标系,由于传感器电磁系统具有轴对称性,故取yoz平面进行计算。如图3所示。
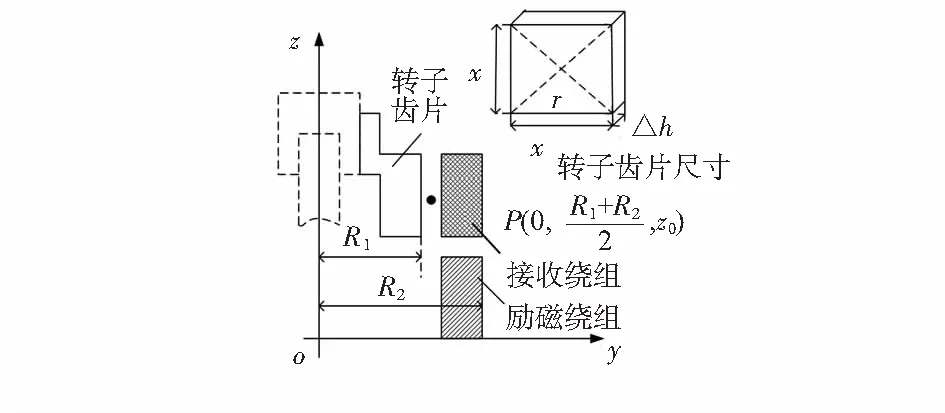
图3 传感器位置图
(2)
(3)
利用Mathematica积分计算径向电磁感应强度可知[7],当y轴固定时,Br在一定范围内沿z轴成线性分布,取P点磁场场量作为转子齿片有效气隙内磁感应强度的均值,即Bs=Br。
2.2 转子齿片涡流磁场计算
立体扭矩传感器的主要原理是利用转子齿片的涡流效应,其中转子齿片的涡流电动势为εe=εj+εd。其中εj是由导体在时变磁场中因磁通变化产生的感生电动势,εd是导体作切割磁感线运动而产生的动生电动势。将转子齿片与接收绕组相对应的圆弧区域简化为边长为x的正矩形,则当转子片随输入轴以转速n转动时
(4)
(5)
式中x为转子齿片正矩形边长,m;v为转子片的转动线速度,m/s,v=2πR2n;n为转子转速,r/s。
矩形转子齿片电阻为
(6)
式中 ρ为转子片的电阻率,Ω·m;r为矩形外接圆半径,m;Δh为电流等效透入深度,m。
则转子齿片区域上的电涡流为
(7)
通过电磁学中的研究可知[7]:在高频交变磁场中,涡流的电流密度J在转子齿片内并不是均匀分布的,而是随深度增加按指数规律衰减[8],涡流密度减少到导体表面涡流密度的1/e,即大约37 %的对应的深度[9]称作透入深度,涡流电流主要分布在转子片靠近励磁绕组一侧的表层中。工程计算中采用等效透入深度Δh来计算。
转子片在高频交变磁场下,其透入深度为
(8)
式中 δ为导体材料电导率,S/m;μ为导体材料的磁导率,H/m。
通过分析涡流分布形式,利用电磁感应定律可以得到涡电流磁场在有效气隙内的磁感应强度Be。
2.3 接收绕组感应电压
在假设条件(2)下,转子齿片对应位置气隙的磁场强度B为励磁绕组励磁Bs和转子齿片产生涡流去磁Be共同作用的结果[5],即B=Bs-Be,转子气隙对应位置磁场为原磁场B=Bs。在计算接收绕组感应电压时,当转子片随EPS管柱转动一定角度时可以看作是转子不动,接收绕组绕轴线转动某一角度,即可以看作气隙磁场的分布形式和大小都将不变,只是相对于接收绕组的位置发生改变。将立体圆柱结构展开成平面结构,绘制接收绕组与气隙磁场相对位移示意图,如图4所示。纵坐标为气隙磁场强度,横坐标为周向磁场分布。接收绕组中点代表正回路,叉代表反(负)回路,回路面积为S。
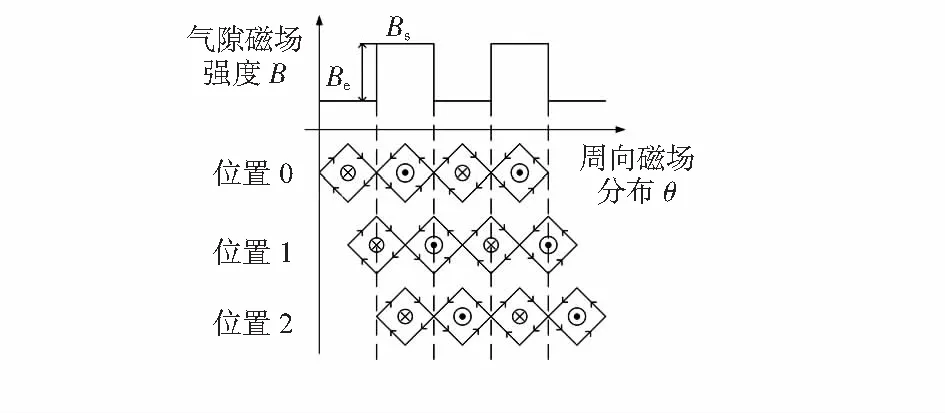
图4 传感器转角示意图
3 电磁仿真分析
3.1 静态时的磁场分布
本文通过使用电磁场分析软件AnsoftMaxwelll对所设计的扭矩传感器进行建模仿真[10]。因为传感器采用上下对称结构,为简化分析过程,保留模型上半部分,且励磁绕组半径R1=15mm,长度L=5mm,单位长度线圈匝数m=10,通入励磁电流I=100mA,频率f=4MHz,转子齿片半径R2=14.25mm,转子齿片个数N=9。在传感器气隙内建立以轴线为中心,半径为r=14.8mm的圆柱形面域,分析气隙内磁场的分布状态,如图5所示。通过仿真结果可知,由励磁绕组产生的磁感应强度在绕组附近最强,沿着轴线方向递减,转子齿片对应位置的磁感应强度明显减小。
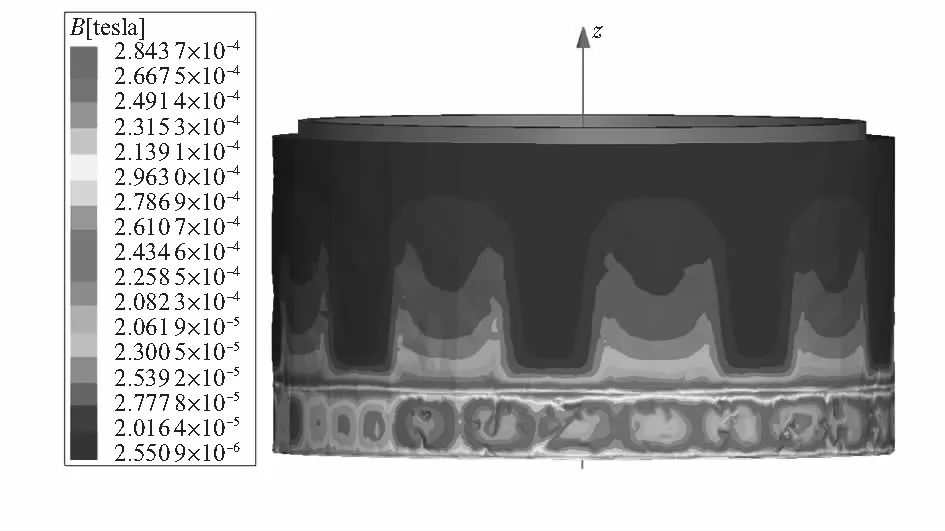
图5 r=14.8 mm面域磁感应强度云图
取过转子齿片中心点处的圆周路径进行场量分析,得到此路径磁感应强度曲线,如图6所示。可知磁场在圆周路径上近似呈方波分布,且由励磁绕组产生的磁感应强度均值为65μT,而转子齿片对应位置的磁场最小为7.5μT,说明由转子齿片的涡流去磁效应十分明显。仿真曲线与2.2中计算曲线偏差主要是由转子齿片以及与连接齿片的转子圆环漏磁导致的。
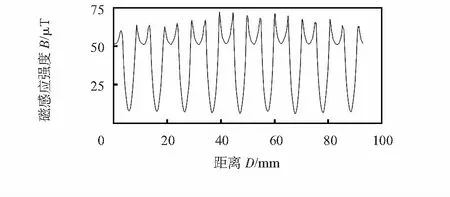
图6 r=14.8 mm路径磁感应强度
3.2 动态时输出电压分析
采用瞬态磁场对传感器电磁系统进行动态仿真。对齿片转子施加旋转驱动,使用外加电路,由于电脑设备限制,为了输出较为直观的波形,设定齿片转子的转速为常量n=3 700r/s,仿真时间为转子齿片在此转速下的旋转过1.5个回路区间(转角θ=60°)的时间,即stoptime=9μs。接收绕组输出电压的仿真结果如图7所示,当齿片转子匀速转动,接收绕组输出电压为高频感应电压[11],其频率与原电压频率相同,其幅值随转子齿片与绕组回路相对位置变化做呈正弦变化,电压峰值为19mV。
4 结 论
仿真结果表明:设计的立体扭矩传感器中转子齿片的涡流去磁效应十分明显,当转子随输入扭矩转动时,菱形
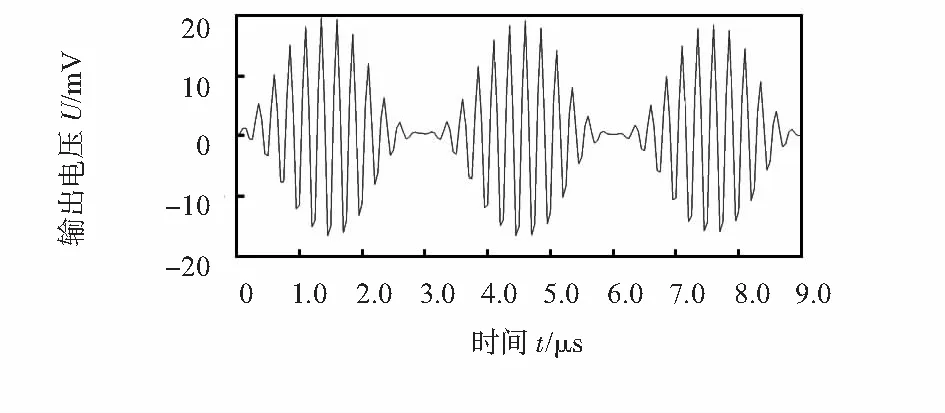
图7 接收绕组输出电压
绕组输出电压为高频正弦信号,幅值与转子转速相关。仿真结果与理论计算值基本一致,对传感器整体结构尺寸设计及信号后处理具有一定指导意义。
[1] 石延平,陈季萍,周庆贵.一种新型磁电感应式动态非接触扭矩传感器[J].仪表技术与传感器,2010(5):3-6.
[2] 方玉良.用于EPS的电磁感应式扭矩传感器研究[D].哈尔滨:东北林业大学,2014.
[3] 李志鹏,常子凡,那少聃.立式非接触电磁感应扭矩传感器:中国,CN2015209637250.0[P].2016—02—29.
[4] 祝长生.时变磁场下径向电涡流阻尼器的动力特性[J].机械工程学报,2009(8):31-36.
[5] 衣丰艳,徐 刚,于明进,等.发动机电涡流缓速器制动力矩的计算[J].机械设计与研究,2009(4):40-43.
[6] 欧大生,张剑平,秦建文.磁电相位差式转矩测量技术研究[J].电子测量技术,2007(4):100-103.
[7] 惠小强,陈文学.有限长通电螺线管空间的磁场分布[J].物理与工程,2004(2):22-23,25.
[8] 张晓燕,季学武.电磁感应式转向盘转速传感器的研究[J].仪器仪表学报,2009(12):2551-2556.
[9] 李 凌,杨 明,叶 林.感应式非接触角度传感器电磁耦合系统设计[J].传感器与微系统,2011,30(10):130-132,140.
[10] 吴 畏,聂鲁燕,马利民,等.Ansoft Maxwell电磁场分析在短路匝传感器输出特性中的应用[J].传感器与微系统,2011,30(6):131-134.
[11] Hiroyui Wakiwaka,Muneo Mititamua.New magnetostrictive type torque sensor for steering shaft[J].Sensors and Actuators A: Physical,2001,911:915.
DOI:10.13873/J.1000—9787(2017)02—0025—03
Magnetic field and output voltage analysis of 3D torque sensor
GUO Yan-ling, CHANG Zi-fan, NA Shao-dan
(College of Electromechanic Engineering,Northeast Forestry University,Harbin 150040,China)
Torque sensor is a core component of automotive electric power steering(EPS)system,a new kind of torque sensor based on electromagnetic induction principle is proposed.Structure and working principle of the sensor are introduced.Calculation formula of magnetic field and mathematic model for output voltage are deduced with the theory of electromagnetic field.Electromagnetic induction system of sensor is modeled and simulated by using Ansoft Maxwell.The simulation result reveal that the magnetic field of circumferential air-gap similar to square wave and the output voltage signal is similar to sine curve,the simulation result of magnetic field distribution and the output voltage are consistent with the theoretical calculation.
torque sensor; electromagnetic induction; math modeling; simulation of Ansoft Maxwell
10.13873/J.1000—9787(2017)02—0018—03
2016—03—29
TP 212
A
1000—9787(2017)02—0018—03
郭艳玲(1962-),女,教授,主要从事机电一体化应用技术研究工作。
