一种基于联邦卡尔曼滤波的信息融合定位算法
2017-02-14吴延昌赵
◆吴延昌赵 敏
(1.中国矿业大学物联网研究中心 江苏 221008; 2.平顶山工业职业技术学院物联网研究中心 河南 467000)
一种基于联邦卡尔曼滤波的信息融合定位算法
◆吴延昌1,2赵 敏2
(1.中国矿业大学物联网研究中心 江苏 221008; 2.平顶山工业职业技术学院物联网研究中心 河南 467000)
本文设计了一种基于联邦卡尔曼滤波的WLAN系统与RFID系统联合定位的信息融合算法。针对室内移动节点单一定位系统存在的定位精度不够、定位时间过长及算法复杂度不理想等问题,提出将WLAN系统和RFID系统作为联邦滤波器的两个独立子系统,采用无迹卡尔曼滤波算法进行独立的量测更新和时间更新,主滤波器用无反馈模式对子系统输出的信息进行融合。仿真结果表明,该算法分散和减少了无迹卡尔曼滤波的计算量,较之于单一定位系统,大幅减少了最大偏差和最小偏差,定位精度显著改善。
联邦卡尔曼滤波; WLAN系统; RFID系统; 定位算法; 融合算法
0 前言
随着移动终端设备数量的增加和智能化程度的提高,定位技术[1]作为各种移动应用的核心支撑功能,受到研究者的高度重视。目前常见的室内定位技术有超声波定位技术、WLAN定位技术、Zigbee定位技术[2]、红外线定位技术和RFID定位技术[3]等。但是在实际应用中单一的定位技术很难取得满意的应用效果,因此多传感器信息融合技术[4][5]已成为室内移动节点定位研究领域的重要课题之一。
WLAN定位技术近年来得到快速发展,目前主要包括依据采集分析接入点的信噪比或是信号质量的Nibble系统[6],利用接收AP的信号强度定位的WHAM!定位系统[7]、Ekahau 定位系统[8]、Horus 定位系统[9]和 Rice 系统。而RFID系统因为其非视距和非接触等优点备受关注,虽然定位时间较短、精度较高但是定位范围受限于发射器和接收器之间的距离。本文基于联邦卡尔曼滤波实现WLAN定位系统和RFID定位系统的信息融合,可以有效提高移动节点的定位精度和实时性,具有一定的实用价值。
1 理论基础
1.1 联邦卡尔曼滤波模型
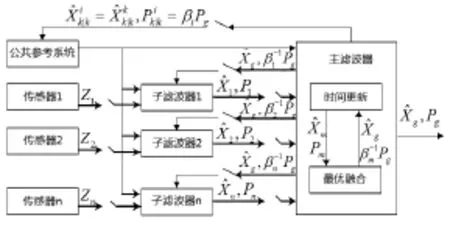
图1 联邦滤波器的一般结构
传统卡尔曼滤波技术面向多传感器数据融合的方法一般包括集中式卡尔曼滤波和分散化卡尔曼滤波。而Carlson[10]提出的联邦滤波器因其计算量小、容错性能好且设计灵活,取得了较好的实际应用效果。
基于联邦卡尔曼滤波的融合算法又分为各子滤波器估计不相关时的融合算法和各子滤波器估计相关时的融合算法。由于在实际使用中无法保证各个子滤波器是局部不相关的前提,因此本文主要研究各子滤波器的估计相关时的融合算法,采用方差上界技术将滤波算法进行变换,从而使得各子滤波器局部估计从相关变成不相关状态。
如图1所示,联邦滤波器是一种两级滤波结构。假设各子滤波器的状态估计可以表示为式中是各子滤波器的公共状态cX的估计,是第i个滤波器专有的状态估计。
1.2 联邦卡尔曼滤波器的流程设计
一般情况下,联邦滤波器的工作流程主要包括信息分配、信息的时间更新、信息的量测更新和信息融合这四个过程。
第一步,进行信息分配,确定主滤波器与各个子滤波器之间信息分配的比例系数,如式(1)。表示系统的过程信息。

在式(1)中,参数iβ被称为信息分配系数,满足条件0iβ>及式(2)的分配原则。

第二步,进行信息的时间更新。该过程分别在主滤波器和各个子滤波器之间独立进行,并采用相同的滤波算法,见式(3)。

第三步,进行信息的量测更新。该更新在系统各子滤波器中进行,而主滤波器不需要进行该步骤。各子滤波器的量测更新算法见式(4)。

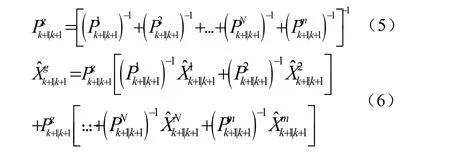
第四步,进行信息融合。将各子系统的局部估计信息按照设定的算法公式进行融合计算,以得到估计全局最优。该步工作位联邦滤波器的核心环节,融合算法见式(5)和(6)。
经过上述四步的流程设计,虽然因为方差上界技术导致的信息局部丢失,但是在信息融合过程中这种非最优性又被重新合成,在全局方程上最终获得了最优解。
2 AN/RFID信息融合定位算法
基于WLAN系统和RFID系统联合定位的信息融合算法中,联邦滤波器由一个主滤波器和两个子系统组成,如图2所示。为两个子滤波器输出的状态估计值;1P、2P分别为两个子滤波器的协方差阵和gP为联邦滤波器的最优估计值和协方差阵。
子系统WLAN和子系统RFID分别采用无迹卡尔曼滤波算法进行独立的量测更新和时间更新,量测信息在子系统内并行处理。主滤波器用无反馈模式对子系统输出的信息进行融合,从而获取高精度的定位信息。
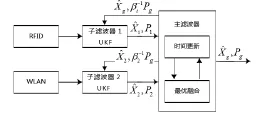
图2 RFID/WLAN融合定位结构简图
2.1 系统状态方程
系统移动节点的定位是在二维平面内进行,因此公共状态变量X取为:

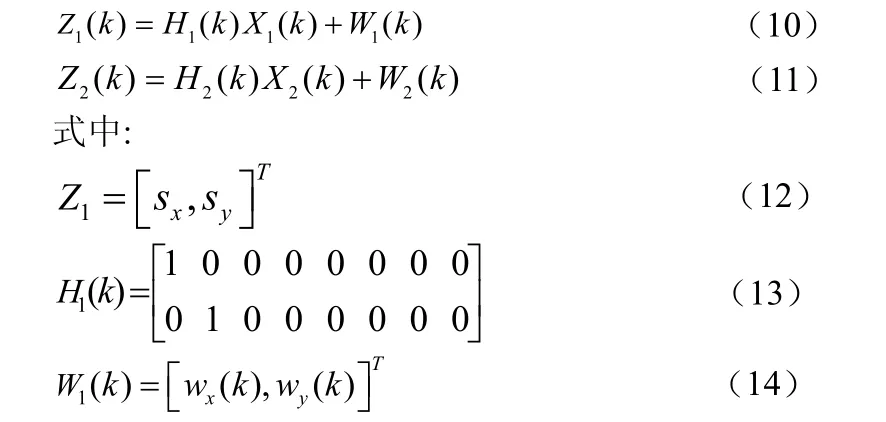
其中,xs和ys分别表示移动节点在横坐标X方向和纵坐标Y方向的位置,xv和yv分别表示移动节点X和Y方向的速度。
两个子滤波器为:

其中,W表示WLAN系统误差,V表示RFID系统误差。
2.2 系统的观测方程
子滤波器的观测方程分别表示为:
2.3 WLAN和RFID的信息融合
由于WLAN系统和RFID系统相互独立工作,互不影响,因此在图2所示的联邦滤波器中,信息融合算法的第一步信息分配时,取公共参考系统的系数mβ为0,在计算时,不需要进行滤波计算,只需要进行两个子系统的信息综合,同时将主滤波器的估计值设定为全局估计。主滤波器的算法表示如下:

信息融合中主滤波器的全局估计,由各个子滤波器状态向量估计融合后获得。子系统的分配系数iβ不同,其在主滤波器输出中的权重就不同。但是,虽然主滤波器对子滤波器的利用权重由于iβ不同而不同,但仍然利用了各子系统的所有信息,其融合后的最优性与iβ无关。本文通过实验验证了这一结论,如表1所示,分别取WLAN子系统的分配系数为0.9,0.1,0.5,RFID子系统的分配系数为0.1,0.9,0.5,主滤波器的分配系数均为0。实验结果表明,信息分配系数对主滤波器的融合结果影响较小。
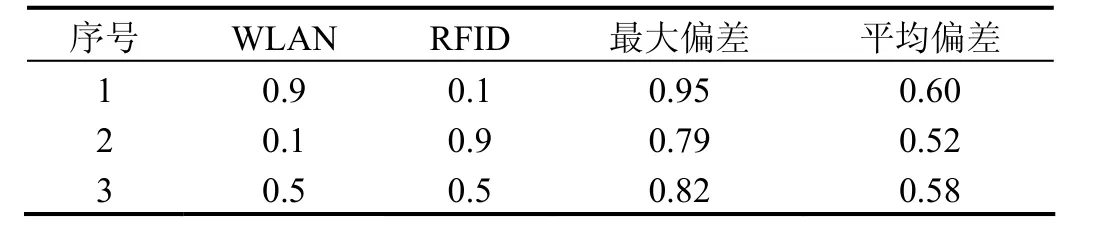
表1 实验结果对比表
3 仿真结果分析
融合算法的仿真实验在物流实验室进行,室内封闭空间,15m×10m,面积约150m2。以实验室内AGV小车携带移动节点,共进行了三组实验,实验过程如下。
3.1 实验环境搭建
三组实验分别为WLAN系统单独定位实验,RFID系统单独定位实验,WLAN/RFID联合定位实验。WLAN系统由3个路由器组成,分别用W1、W2、W3表示,路由器保持和移动节点的无线网卡在同一平面内。RFID系统采用7个RFID标签来进行实验,分别表示为R1、R1…R7,读写器由移动节点携带。人为在实验室内划分0.5m*0.5m的单元格,并建立坐标体系。实验时,路由器和RFID标签的坐标分别为:W1(3.0m,1.0m), W2(1.0m,4.0m),W3(5.5m,6.0m),R1(2.5m,0.5m),R2(0.5m,1.5m),R3(0.5m,4.5m),R4(2.0m,6.0m),R5(5.0m,6.0m),R6(5.5m,4.0m),R7(4.0m,3.0m)。在实验时,分别选取一部分点作为实验的采样节点。
移动节点在二维平面内按照预设路径做四段连续的直线轨迹运动,起始节点为(4m,0m),运动时间为240秒沿预设路径以0.02m/s匀速前行。信息融合算法中,采样时间间隔为33s,
3.2 实验结果分析
三组实验的结果如表2所示。图3为实验结果的综合比较图。实验结果表明,采用联邦滤波结构构造的信息融合系统,分散和减少了无迹卡尔曼滤波的计算量,WLAN/RFID联合信息融合定位算法比较于单独的WLAN系统定位、RFID系统定位,最大偏差分别减少了52.72%、42.86%,最小偏差分别减少了71.74%、62.86%,定位精度显著改善。

表2 三组实验结果对比表
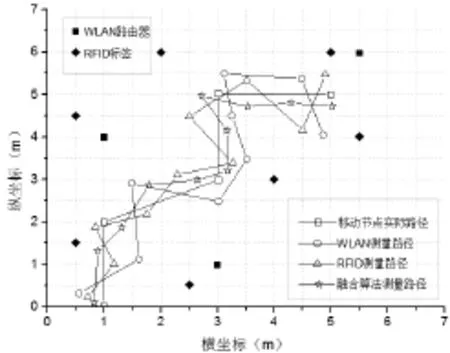
图3 三组实验结果比较图
4 结束语
随着移动网络技术的发展和“互联网+”应用的不断丰富,移动定位技术作为核心支撑,已经取得了一定的研究成果,但是还无法满足某些场合或者条件下,存在的种种客观条件的制约。本文设计了一种基于联邦卡尔曼滤波的信息融合定位算法。该算法在不增加算法复杂度的前提下,有效提升了单一定位系统的定位精度和实时性。仿真实验结果也表明,该算法在移动定位中是一个高效的定位信息融合算法。
参考文献:
[1]曹永升,梁胜祥,谢冠恒,郑喜艳,赵书俊.移动定位技术的现状与发展趋势[J].电子技术应用,2015.
[2]胡庆新,程阵.基于ZigBee的无线传感器网络定位系统的设计[J].电子技术应用, 2009.
[3]张颖,李凯.基于RFID技术的多标签定位系统设计[J].电子技术应用,2012.
[4]吴延昌,张佰慧.基于Zigbee和RFID的施工现场智能监控系统设计[J].煤矿机械,2015.
[5]吴延昌,王洪.物联网感知技术在危险源预警系统中的应用[J].工矿自动化,2013.
[6]P.Castro,P.Chiu,T.Kremenek,R.Muntz.A probabilist-ic room location service for wireless networked enviro-nments [C].In Proceedings of the 3rd International Confe-rence on Ubiquitous Computing (UbiComp),Georgia, U-SA,2001.
[7]D.L. Lee,Q.Chen.A model-based WiFi localizationme thod[C]. In:Proceedings of Infoscale.2007.
[8]S.C.Yeh,Y.Chiou,Y.J.Peng.A research for indoor LBS technology based on RSSI prediction model[J].Jou-rnal of Inf ormatics & Electronics,2006.
[9]M.Youssef,A.Agrawala.Handling samples correlate-on in the horus system[C].In IEEE Infocom,2004.
[10]N.A.Darlson,M.P.Berauducel.Federated kalman filter simulation results[J].Navigation,1994.
