温室作业机具室内定位方法研究
2017-02-08张京开李为为王书茂
王 新 许 苗 张京开 刘 旺 李为为 王书茂
(1.中国农业大学工学院, 北京 100083; 2.北京市农业机械试验鉴定推广站, 北京 100078)
温室作业机具室内定位方法研究
王 新1许 苗1张京开2刘 旺2李为为1王书茂1
(1.中国农业大学工学院, 北京 100083; 2.北京市农业机械试验鉴定推广站, 北京 100078)
针对农机具在温室大棚内的定位、作业轨迹跟踪及作业面积核算需求,提出一种基于多源数据融合理论的温室机具室内定位优化算法。首先根据惯性导航测量技术预估被测目标定位初值,再利用无线RSSI测距技术使用加权质心算法获得定位测量结果,利用卡尔曼滤波算法进行定位信息最优化计算,以消除基于单一测量技术存在数据漂移、测试信号受遮挡、电磁干扰造成的误差,获得准确的定位信息,进而实现作业轨迹的实时跟踪以及作业面积的有效核算。在Matlab仿真分析中,首先建立定位算法评价指标以便于定位效果评估,通过仿真计算得出:基于多源数据融合的优化定位算法的定位精度及稳定性均优于单一无线RSSI室内定位算法。温室大棚田间试验的实际测试结果表明,室内定位精度不大于0.125 m,定位误差小于0.4%,能够较好地满足温室内作业机具的定位及作业轨迹实时获取与监测的需求。
温室; 作业机具; 定位; 作业轨迹; 多源数据融合; 卡尔曼滤波
引言
随着设施农业的不断发展,温室大棚面积逐年增加,温室作业的机械化、自动化需求增长迅速,温室内作业机具的作业质量、作业轨迹及作业面积,成为生产实际中急需量化的作业核算指标。此类信息的实时获取与检测对指导农机高效作业、控制生产资料的投入,以及计算农作物单位面积产量等具有很大帮助。
目前,全球卫星定位系统(Global positioning system,GPS)能够为地面用户提供准确实时的经度、纬度和高程等导航定位信息,是支撑精准农业实践的核心技术之一,被广泛应用于农业机械化导航、农田定位和面积测量中,其在面积测量方面具有高精度、全天候、高效率、多功能、易操作等明显优势,但是由于室内环境下GPS信号不可获得,因此不能将其应用于室内农机作业轨迹的采集。目前,目标点的室内定位方法多是基于距离测量的定位算法,包括:基于接收信号强度(Received signal strength indication,RSSI)[1-2],信号到达时间(Time of arrival,TOA),信号到达时间差(Time difference of arrival,TDOA)和信号到达角度(Angel of arrival,AOA),其中基于无线传感网络RSSI定位方法在室内定位应用中较广[3],其使用“接收信号强度-距离”模型进行测距,检测方法简单易行,但在实际测试环境下,由于天线增益、反射、阻挡、多径传播等因素的影响,基于RSSI的作业轨迹跟踪测量系统的测试误差会随着距离d的增大而增大,其传播损耗和传播距离d之间的线性关系也会发生局部的剧烈变化,定位精度会有所降低。此外,由于制造误差、测试系统安装误差和环境因素的影响,测量结果还会存在传感器偏差、灵敏度误差、噪声等其他随机误差。若将这些误差包含在定位数据中进行处理,随着时间的增长和测试距离的积累,将引起极大的位置误差,作业轨迹跟踪的准确程度将大大降低。因此,测量数据误差控制和补偿方法是温室机具室内定位作业轨迹跟踪算法的关键。
利用卡尔曼滤波技术实现温室作业机具定位目标的多源信息融合,将惯性传感技术与基于无线传感器网络[4-7]的RSSI技术相结合,可有效弥补两类室内定位技术的测量误差,实现被测目标位置信息的最优化求解。为解决定位算法的实际应用问题,本文利用Cubature卡尔曼滤波算法对系统数学模型进行简化,降低系统编程难度,并通过仿真分析与田间试验对定位方法及误差进行校正。
1 室内轨迹跟踪的关键技术
基于多源数据融合[8-9]实现定位误差补偿这一基本思想,实验室所构建的温室机具作业轨迹跟踪测试系统由无线测距模块与位姿动态跟踪模块组成。无线测距模块基于RSSI测距方法利用加权质心定位模型进行温室机具位置坐标信息的获取。惯性测量[10-11]模块即在被测温室机具上安装陀螺仪和3轴加速度传感器,通过实时测量温室机具的3轴加速度和角加速度,积分获得被测温室机具的位置偏移和方向(图1)。虽然惯性传感器能够直接动态地测量被测目标的位姿变化,但其同样存在误差漂移及积累等问题,不易单独将其用做室内目标的跟踪定位。综合考虑到两种目标轨迹跟踪方法的特点,基于多源数据融合理论,将惯性测量方法与三边加权质心算法相结合,以弥补两类数据的测试误差,实现被测目标位置信息的最优化自回归求解,获得温室机具室内最优动态轨迹信息。

图1 位置关系及传感器安装Fig.1 Position relationship and installation of sensors
1.1 RSSI测距原理
在无线传感器网络中,无线信号发射功率与接收功率的关系式为
PR=PT/rn
(1)
式中PR——接收功率PT——发射功率r——收发传感器之间的距离n——传播因子,与环境有关
节点的发射功率是由传感器本身决定的,为已知量,用A表示,对式(1)取对数并代入A得到
10lgPR=A-10nlgr
(2)
信号强度单位用dBm表示,则可以得到
PR(dBm)=A-10nlgr
(3)
式(3)即为“接收信号强度-距离”模型的公式表达[12],当1个节点发射信号,另1节点接收信号时,通过测量接收信号的强度,即可根据式(3)算出两节点之间的距离。
1.2 加权质心定位模型
在使用三边测量法[13]的基础上对目标节点进行定位,三边测量法是一种基于距离的定位算法。其算法描述如下:将图2中的3个圆分别记为A、B、C,其圆心坐标分别为(X1,Y1)、(X2,Y2)、(X3,Y3),设未知节点D坐标(X,Y),3个圆的圆心A、B、C到D的距离分别为d1、d2、d3,则可得方程组
(4)

图2 三边测量算法原理图Fig.2 Schematic of trilateration algorithm
对方程组进行求解得到目标节点的坐标,但由于实际情况中测距误差的存在,三边测量法使用中式(4)大多没有实数解,在实际使用中通常需要使用不同方法计算目标节点的坐标。因此,在被测目标定位模型中引入加权质心定位算法[14-15]。具体步骤如下:
(1)分别求A和B、B和C、C和A的交点,并取距离3个圆圆心较近交点的坐标,由此得到(X′1,Y′1)、(X′2,Y′2)、(X′3,Y′3)。根据质心算法估算目标节点的坐标为
(5)
(2)在无线网络中,每个待测节点接收周围的参考节点向它发送的数据包,待测节点根据接收到的RSSI值测算出距离,取信号强度在一定阈值范围内的参考节点,根据质心公式可以计算出它的坐标,即
(6)
其中
ωi=1/d
式中ωi——权值d——参考节点到待测节点的距离估测值X′i——距离3个圆圆心较近交点的横坐标
Y′i——距离3个圆圆心较近交点的纵坐标
Xz——加权质心定位算法算出的目标节点横坐标
Yz——加权质心定位算法算出的目标节点纵坐标
在计算坐标时,引入加权因子ωi,由其决定参考节点对质心坐标的影响程度。
1.3 惯性测量模型
在温室机具作业轨迹跟踪测试系统中,温室机具的位置信息可由4个自由度来描述,需要用3个惯性传感器(2个加速度计和1个双轴陀螺仪)来测量位置信息的变化情况。整个动态惯性测量系统在x、y轴的位置和方向的测量具有6个相应的状态变量,即

位姿动态跟踪系统的状态方程可表示为
(7)
其中
式中xA(k)、yA(k)——第k时刻x轴和y轴加速度计测量的状态量
ΦAx、ΦAy——系统沿x轴和y轴加速度计测量的状态转移矩阵
ΦGx、ΦGy——系统沿x轴和y轴陀螺仪测量的状态转移矩阵
xA(k-1)、yA(k-1)——第k-1时刻x轴和y轴加速度计测量的状态变量
xG(k-1)、yG(k-1)——第k-1时刻x轴和y轴陀螺仪测量的状态变量
wAx(k)、wGx(k)——传感器系统沿x轴测量的附加噪声
wAy(k)、wGy(k)——传感器系统沿y轴测量的附加噪声
T——间隔时间
2 融合算法及模型简化
2.1 数学模型的建立
在理想状态下,利用无线测距RSSI方法进行测距,结合加权质心算法,可以获得较好的定位精度。但是,在实际应用中,由于温室大棚环境复杂,传感器信号易受到作物、棚内设施及温室结构的遮挡或干扰,引起较大的定位误差。基于卡尔曼滤波原理,首先利用1.1、1.2节所提到的RSSI测距技术及三边质心算法,将其作为待定位目标的测量值;再结合1.3节所提出的惯性传感测量模型,将惯性传感系统测量数据作为定位估计值,对检测数据进行多源数据融合(图3),加速度和角速度由传感器测量得到,获得温室机具作业轨迹跟踪测试系统数学模型的一般式
z(k)=h(x(k))+v(k)
(8)
式中z(k)——无线传感器运用RSSI算法获得的第k时刻的被测目标位置测量值的最优估计值
x(k)——利用惯性传感测量系统获得的第k时刻的测量值的最优估计值
h(·)——将系统状态变量映射为测量变量的变换矩阵
v(k)——与测量不确定因素相关的测量噪声
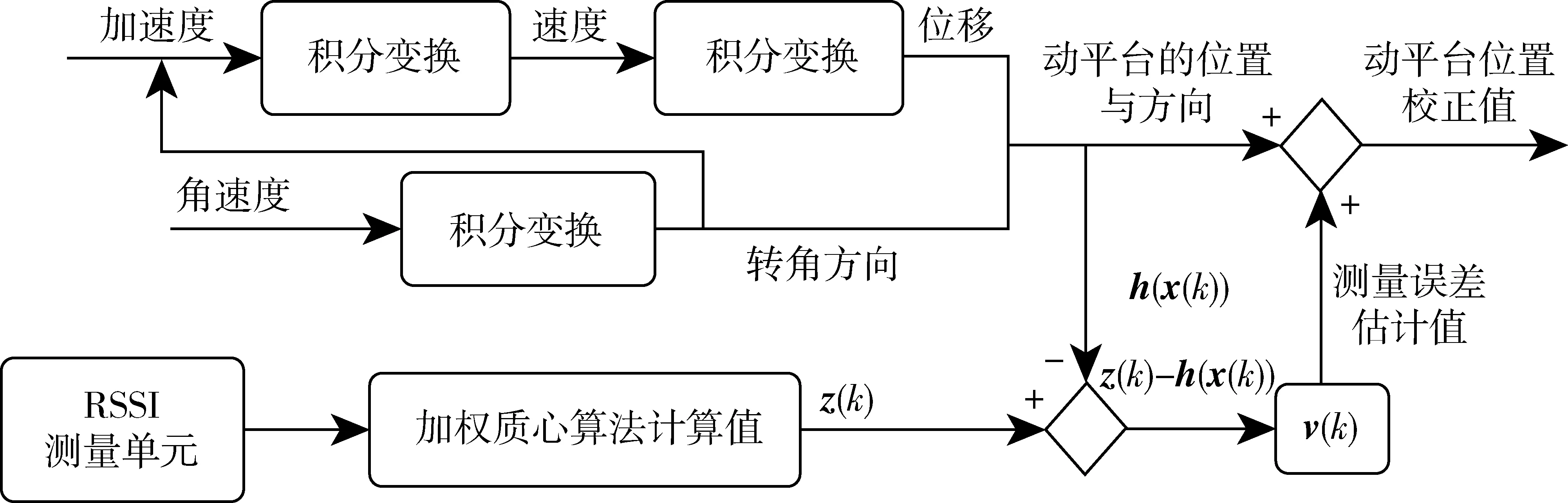
图3 算法实现结构图Fig.3 Chart of algorithm
根据式(6)、(7),式(8)可以转换为
(9)
其中

式中vx(k)、vy(k)——沿x轴和y轴方向的测量噪声
以第k时刻计算定位目标为例,被测目标位置信息的最优解数学模型可表示为
(10)
式中x(k)——沿x轴基于位姿动态检测方法经过滤波处理的被测目标位置k时刻的最优解
y(k)——沿y轴基于位姿动态检测方法经过滤波处理的被测目标位置k时刻的最优解
xp(k)——利用式(10)获得的第k时刻x方向位置信息的最优解
yp(k)——利用式(10)获得的第k时刻y方向位置信息的最优解Kgx(k)、Kgy(k)——第k时刻最优化增益系数
其中,最优化增益Kgx(k)、Kgy(k)是随时间不断变化的,其计算式为
(11)
式中Px(k-1)、Py(k-1)——xp(k-1)、yp(k-1)对应的协方差
Rx、Ry——xz(k-1)、yz(k-1)对应的协方差
2.2 系统数学模型的实用化
为解决定位算法的实际应用问题,利用Cubature卡尔曼滤波算法对系统数学模型进行简化,优化式(9)中的矩阵变换模型,通过动态数据滑动平均算法进行等效,从而降低了系统编程难度。
非线性滤波[16-18]在处理状态估计任务时均要对由这些状态变量表示的均值和方差进行积分,这些积分都可统一表示为高斯权重积分形式
I(F)=∫UnF(x)e-xTxdx
(12)
式中F(x)——任意函数Un——积分区域
利用Spherical-Radial Cubature准则进行积分,取x=rt(tTt=1,r∈[0,∞)),因此式(12)可分离为Radial积分和Spherical积分,即
(13)
S(r)=∫SnF(rt)dρ(t)
(14)
其中
ρ∈Sn
式中Sn——n维单位球面
Radial积分可由拉格朗日积分转换为
(15)
其中
Spherical积分可由基于3阶精度单项式Cubature规则近似为
(16)
其中
式中uS——集合〈1〉的第i列,对于n=2,有〈1〉=(〈1,0〉T,〈-1,0〉T,〈0,-1〉T,〈0,1〉T)
结合式(15)、(16),并整理得到Spherical-Radial Cubature规则
(17)
对于标准高斯分布
(18)
结合式(11)、(17)有
(19)

式中n——状态维数
由此可见,CKF选取2n个同等权值的Cubature点计算高斯权重积分,计算出Cubature点(ηi,ui)后可以通过时间更新得到CKF滤波算法。
根据式(19)可知
(20)
其中
根据式(20)即可通过数据的反复迭代编程,实现定位信息最优解的获取。
3 仿真分析
为验证上述轨迹跟踪数学模型的定位准确性,运用Matlab 7.10.0软件作为仿真工具,对温室机具室内作业过程进行仿真分析。
3.1 定位算法评价指标
(1)定位误差

(21)
定位误差越小,算法性能越好。
(2)定位覆盖率
定位覆盖率为可实现定位的未知节点与节点总数之比,定位覆盖率越高,算法性能越好。假设估计位置坐标(x,y,z)同时满足以下关系时才认为可以实现定位
(22)
式中xmax、ymax、zmax——被测空间的长度、宽度、高度的最大值
(3)误差分析
误差分析包括:最大误差距离、最小误差距离、平均误差距离以及误差距离的标准差。其中,误差距离的标准差表示定位算法的稳定性。
(4)位置数据和定位效果图
为从直观上看到算法的性能,以N(N≥100)定义仿真中与真实位置之间的距离最接近于平均误差距离的估计位置坐标数据(在图4中简称“真实位置”和“估计位置”),并画出仿真效果图。
3.2 仿真环境和参数设置
在长为100 m,宽为40 m,高为4 m的三维空间中按照图4中红色箭头标注的轨迹生成150个均匀分布的待定位节点,为验证算法在实际测试过程的补偿作用,在仿真分析中加入随机粗大误差来模拟无线测距模块受到遮挡、干扰、反射时的测试误差,与此同时,引入白噪声随机误差信息以模拟信号漂移。每个待测节点与参考节点进行100次测距,取其平均值用于计算待测节点的定位估计值。试验模拟温室机具在温室大棚中的往复式作业情景,以0.2 m/s的速度匀速行进作业,分别运用加权质心算法和多源数据融合算法对被测目标的位置进行估计,通过数据融合后的定位效果仿真图如图4所示。

图4 多源数据融合算法定位效果图Fig.4 Positioning figure of multi-source data fusion algorithm
3.3 仿真结果分析
从仿真结果(图5及表1)可知,运用多源数据融合算法进行目标跟踪定位,在引入粗大误差及传感器检测白噪声的前提下,定位平均误差最大不超过100 mm,且其测试精密度、定位覆盖率等指标明显优于加权质心算法,具有较高的定位精度。从图5中可以看出,在使用单一算法进行定位时,受粗大误差及传感器测量噪声的干扰较大,系统鲁棒性较弱。因此,多源数据融合算法的引入可以有效提高原有单一定位算法的测试准确度和抗干扰能力。

图5 Matlab仿真结果Fig.5 Test results of Matlab simulation
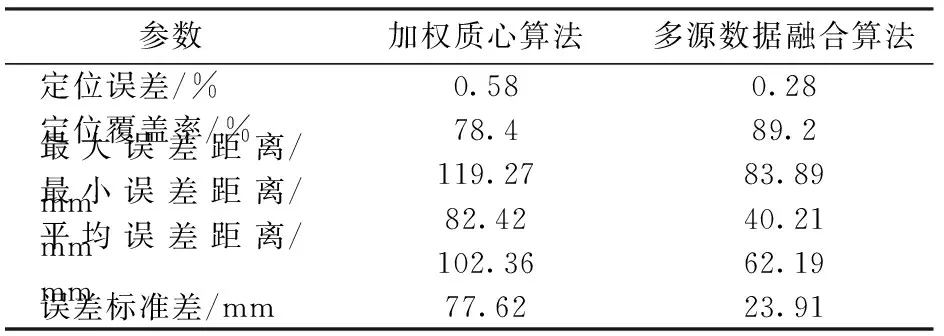
参数加权质心算法多源数据融合算法定位误差/%0.580.28定位覆盖率/%78.489.2最大误差距离/mm119.2783.89最小误差距离/mm82.4240.21平均误差距离/mm102.3662.19误差标准差/mm77.6223.91
4 试验
4.1 温室大棚室内试验验证方案设计
虽然多源数据融合算法在仿真中获得了较为理想的定位精度,但是实际测试条件较仿真相比更加复杂,检测数据时常受到被测目标的振动、电磁干扰、障碍物遮挡等不确定因素的影响,因此,需要在实际温室大棚室内环境下进一步进行验证试验(简称温室试验)。利用实验室开发的CMT-20LP无线测距模块进行测距(图6b),CMT-20LP无线模块工作于2.4 GHz ISM频段,既可以高速传输数据(最高可达2 Mb/s),又可以精确测距(室外测距精度高达1 m),且测距和数据通信可以同时完成。CMT-20LP模块采用线性调频(CSS)调制方式,信号带宽为22 MHz和80 MHz,采用符合 IEEE802.15.4a标准的无线收发器芯片nanoLOC TRX Transceiver(NA5TR1),增加了输出PA(功率放大器)、输入LNA(低噪声放大器)、收发转换控制电路,输出匹配到50 Ω,使用方便,并且向下兼容nanoPAN 5375模块,可以直接代换,室内定位系统结构如图7所示。

图6 测试系统结构图Fig.6 Structure diagrams of testing system1.芯片核心板 2.电池 3.芯片底板

图7 室内定位系统结构Fig.7 Structure of indoor positioning system1.数据采集终端 2.参考点 3.机器人
4.2 试验结果及分析
将温室机具作业轨迹室内定位系统安装在长40 m、宽30 m的温室大棚中进行田间验证试验,试验中检测系统模拟仿真情况,温室机具作业轨迹跟踪测试设备沿固定路线,从起点开始,以0.1 m/s的速度匀速行进,运动过程中固定于温室大棚顶部的参考节点获得与运动节点的距离信息,利用ZigBee无线通信网络[19-22]将定位信息发给数据采集终端,与此同时,位姿动态跟踪模块将检测系统运动的惯性参数实时上传到数据采集终端中,利用多源数据融合算法对采集信号进行处理,获得检测系统的位置信息。本试验反复进行10次,数据传输频率50 Hz,根据采样时间,每10 s取一固定点,根据起点位置、运动速度与运动轨迹(图4)通过计算获得该点理论坐标位置,再在测试结果中提取该点10次测试结果,分别利用单一加权质心算法和多源数据融合算法计算定位测试结果。按照该方法,在试验结果中随机取21点进行分析,试验数据及分析结果如图8、表2所示。
将温室试验结果与仿真结果进行比较,其在定位误差、误差覆盖率中的数据一致性较好,在误差分析结果中,两种算法误差标准差明显增大,这主要是由于在实际温室测试环境中,检测设备受到人或作物的遮挡以及外围电气设备电磁干扰的概率增大,测试结果的可靠性及一致性下降,影响到定位准确性,但是即便如此,从温室试验结果可以看出,多源融合数据算法进行定位时,其各项指标明显优于仅依赖RSSI测距结果的加权质心算法,其定位误差最大值不超过0.125 m,定位误差小于0.4%,达到较高定位精度。

图8 温室试验单一算法与多源数据融合算法试验结果比较Fig.8 Comparison of single algorithm and multi-source data fusion algorithm in greenhouse test

参数加权质心算法多源数据融合算法定位误差/%0.5420.369定位覆盖率/%80.188.4最大误差距离/mm177.45121.10最小误差距离/mm50.9920.52平均误差距离/mm105.7669.20误差标准差/mm65.9243.91
5 结论
(1)将惯性传感器技术运用于温室机具室内动态跟踪系统中,基于最优化自回归理论,提出了多源数据融合定位方法,该方法运用无线RSSI测距原理,使用加权质心算法进行测距定位,针对其存在的定位误差进行校正,获得了较好的定位精度。
(2)阐述了多源数据融合算法建立过程,以及测量变量与状态变量间关系矩阵的推导过程,通过仿真,获得单一定位算法与多源数据融合算法的比较结果。
(3)通过温室大棚室内验证试验结果分析表明,基于多源数据融合算法的实际测试定位精度不大于0.125 m,定位误差小于0.4%,能够获得较为准确的温室机具室内作业定位及动态作业轨迹跟踪结果,但通过仿真与温室试验的比较可知,该算法受到实际测试环境的干扰时,其测试结果的准确性受到一定程度的影响,其测量误差的控制有待于进一步提高。
1 LUTHY K A, E GRANT D, HENDERSON T C. Leveraging RSSI for robotic repair of disconnected wireless sensor networks[C]∥Proceedings of 2007 IEEE International Conference on Robotics and Automation, 2007: 10-14.
2 KWON O H, SONG H J, SANGJOON P. The effects of stitching orders in patch-and-stitch WSNs localization algorithms[J].IEEE Transactions on Parallel and Distributed Systems,2009,20(9):1380-1391.
3 徐玉滨,邓志安,马琳.基于核直接判别分析和支持向量回归的WLAN室内定位算法[J].电子与信息学报,2011,33(4):896-901. XU Yubin, DENG Zhian, MA Lin. WLAN indoor positioning algorithm based on KDDA and SVR[J]. Journal of Electronic & Information Technology, 2011,33(4):896-901. (in Chinese)
4 邓彬伟,黄光明.无线传感器网络移动节点辅助定位算法[J].仪器仪表学报,2011,32(3):564-570. DENG Binwei, HUANG Guangming. Mobile-assisted localization algorithm for wireless sensor network[J]. Chinese Journal of Scientific Instrument, 2011,32(3):564-570. (in Chinese)
5 WANG Xin, FU Han, CHEN Du, et al. Anti-interference optimal design of grain combine harvester multiple target working speed control mode[J]. Materials Processing and Manufacturing III,2013,21(7): 23-26.
6 王俊,李树强,刘刚.无线传感器网络三维定位交叉粒子群算法[J/OL]. 农业机械学报,2014, 45(5):233-238. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140536&flag=1. DOI:10.6041/j.issn.1000-1298.2014.05.036. WANG Jun, LI Shuqiang, LIU Gang. Three-dimensional localization method of agriculture wireless sensor networks based on crossover particle swarm optimization[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(5):233-238. (in Chinese)
7 宋震龙,蒋刚毅,黄晁,等.基于偏度-峰度检验的无线局域网室内定位算法[J].通信学报,2012,33(5):99-105. SONG Zhenlong, JIANG Gangyi, HUANG Chao, et al. WLAN indoor positioning algorithm based on skewness-kurtosis testing[J]. Journal on Communication, 2012,33(5):99-105. (in Chinese)
8 高红菊,刘艳哲,陈莎.基于改进K-means算法的WSN簇头节点数据融合[J/OL]. 农业机械学报,2015, 46(增刊):162-167. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2015S027&flag=1.DOI: 10.6041 /j.issn.1000-1298.2015.S0.027. GAO Hongju, LIU Yanzhe, CHEN Sha. Fusion of WSN cluster head data based on improved K-means clustering algorithm[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(Supp.):162-167. (in Chinese)
9 王纪章,彭玉礼,李萍萍.基于事件驱动与数据融合的温室WSN节能传输模型[J/OL].农业机械学报,2013,44(12):257-261. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20131243&flag=1. DOI: 10. 6041/j.issn.1000-1298.2013.12.043. WANG Jizhang, PENG Yuli, LI Pingping. Energy transmission model of WSN in greenhouse based on event-driven and data fusion[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013,44(12):257-261. (in Chinese)
10 任春华,陈灿,王满喜,等.一种惯性测量与距离组合的定位修正方法研究[J].仪器仪表学报,2013,34(11):2513-2519. REN Chunhua, CHEN Can, WANG Manxi, et al. Research on a positioning correction method with inertial measurement in combination with distance[J]. Chinese Journal of Scientific Instrument,2013,34(11):2513-2519. (in Chinese)
11 张美娜,尹文庆,林相泽,等.RTK-DGPS融合惯性传感器的农用车辆导航参数计算方法[J/OL].农业机械学报,2015,46(5):7-12. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150502&flag=1. DOI: 10.6041 /j. issn.1000-1298.2015.05.002. ZHANG Meina, YIN Wenqing, LIN Xiangze, et al. A method for calculating navigation parameters via RTK-DGPS fusing inertial sensor for agricultural vehicle[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2015, 46(5):7-12. (in Chinese)
12 韩文霆,王毅.西红柿温室内无线传感器网络2.4 GHz信道传播特性[J/OL].农业机械学报,2014,45(10):264-271. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20141041&flag=1.DOI: 10.6041/j.issn.1000-1298.2014.10.041. HAN Wenting, WANG Yi. Signal transmission characteristics of 2.4 GHz wireless sensor network in tomato greenhouse[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014,45(10):264-271. (in Chinese)
13 熊志广,石为人,许磊,等.基于加权处理的三边测量定位算法[J].计算机工程与应用,2010,46(22):99-102. XIONG Zhiguang, SHI Weiren, XU Lei, et al. Trilateration localization algorithm based on weighted disposal[J]. Computer Engineering and Applications, 2010, 46(22):99-102. (in Chinese)
14 汪苑,林锦国,卓晓冬.基于ZigBee与加权质心法的室内定位方案研究[J].机床与液压,2012,40(1):61-64. WANG Yuan, LIN Jinguo, ZHUO Xiaodong. Study of indoor location scheme based on ZigBee combined with weighted qualitative method[J]. Machine Tool & Hydraulics, 2012,40(1):61-64. (in Chinese)
15 张慧敏,柴毅,许磊.无线传感器网络加权质心相对定位算法[J].计算机工程与应用,2010,46(28):22-24. ZHANG Huimin, CHAI Yi, XU Lei. Weighted centroid relative localization algorithm in wireless sensor network[J]. Computer Engineering and Applications,2010,46(28):22-24. (in Chinese)
16 尹晓红,赵韩,吴焱明,等. 基于卡尔曼滤波的自动引导车串级轨迹跟踪控制[J]. 农业机械学报,2010,41(2):180-184. YIN Xiaohong, ZHAO Han, WU Yanming, et al. Canscade tracking control for AGV based on Kalman filter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010,41(2):180-184. (in Chinese)17 顾玲,管荣根.基于卡尔曼滤波数据融合的并联机床动态定位方法[J].机械工程学报,2007,43(7):195-201. GU Ling, GUAN Ronggen. Dynamic positioning method for parallel machine based on Kalman filtering data fusion[J]. Chinese Journal of Mechanical Engineering, 2007,43(7):195-201. (in Chinese)
18 李莉,张彦娥,汪懋华,等. 现代通信技术在温室中的应用[J].农业机械学报,2007,38(2):195-200. LI Li, ZHANG Yan’e, WANG Maohua, et al. Communication technology for sustainable greenhouse production[J]. Transactions of the Chinese Society for Agricultural Machinery,2007,38(2):195-200. (in Chinese)
19 王新,赵斯琪,王力扬,等.果园作业车稳定性控制方法研究[J/OL].农业机械学报,2015,46(5):13-18.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150503&flag=1. DOI: 10.6041/j.issn.1000-1298.2015.05.003. WANG Xin, ZHAO Siqi, WANG Liyang, et al. Stability control method fororchard vehicle [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(5):13-18. (in Chinese)
20 孙玉文,沈明霞,张祥甫,等.基于嵌入式ZigBee技术的农田信息服务系统设计[J].农业机械学报, 2010,41(5):148-151. SUN Yuwen, SHEN Mingxia, ZHANG Xiangfu, et al. Design of embedded agricultural intelligence services system based on ZigBee technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010,41(5):148-151. (in Chinese)
21 盛平,郭洋洋,李萍萍.基于ZigBee和3G技术的设施农业智能测控系统[J/OL].农业机械学报,2012,43(12): 229-233. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20121241&flag=1. DOI:10.6041/j.issn.1000-1298.2012.12.041. SHENG Ping, GUO Yangyang, LI Pingping. Intelligent measurement and control system of facility agriculture based on ZigBee and 3G[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2012,43(12): 229-233. (in Chinese)
22 MAO Xu, WANG Xin, ZHANG Junchao, et al. Design of electric orchard vehicle four-wheel steering control system [J]. Applied Mechanics and Materials, 2013, 4(2): 245-248.
Greenhouse Agricultural Machinery Indoor Positioning Method
WANG Xin1XU Miao1ZHANG Jingkai2LIU Wang2LI Weiwei1WANG Shumao1
(1.CollegeofEngineering,ChinaAgriculturalUniversity,Beijing100083,China2.AgricultureMachineryTestingAppraisalandExtensionStationofBeijing,Beijing100078,China)
The agricultural machinery positioning, dynamic tracking and working area calculation in greenhouse were focused on, and an optimum indoor positioning algorithm was proposed based on multi-source data fusion theory. The above method firstly relied on inertia navigation measurement technology to estimate initial value of target positioning; then wireless RSSI ranging technology and weighted centroid algorithm were adopted to obtain positioning measurements; and optimum calculation was conducted with Kalman filtering algorithm to eliminate errors in the end, which were common in present measurement using single measurement technology and caused by data drift, signal obstruction, electromagnetic interference and other factors, in order to acquire accurate positioning information, realize real-time dynamic tracking and calculate working area. In Matlab simulation analysis, the positioning algorithm evaluation indexes were established to assess positioning effect and it was found that the proposed algorithm had better positioning accuracy and stability than single wireless RSSI indoor positioning algorithm. In the field test, the results showed that indoor positioning accuracy was not more than 0.125 m and error was less than 0.4%, which could effectively meet demands of agricultural machinery positioning and real-time dynamic tracking in greenhouse.
greenhouse; agricultural machinery; positioning; working track; multi-source data fusion; Kalman filtering
10.6041/j.issn.1000-1298.2017.01.004
2016-09-25
2016-11-01
国家自然科学基金项目(51405492)和北京市科技计划项目(D151100003715001)
王新(1982—),女,副教授,博士生导师,主要从事农业装备智能测控技术研究,E-mail: wangxin117@cau.edu.cn
S625.3
A
1000-1298(2017)01-0021-08
