分布式超宽带雷达地震被困人员协同探测技术1
2017-02-08孙公德赵蕾莛张忠元
孙公德 郭 勇 沈 建 赵蕾莛 张忠元
分布式超宽带雷达地震被困人员协同探测技术1
孙公德 郭 勇 沈 建 赵蕾莛 张忠元
(成都理工大学信息科学与技术学院,成都 610059)
针对震后在大面积废墟下快速准确检测与定位被困人员的需求,本论文提出了用分布式超宽带雷达探测地震被困人员的技术,主要包括对分布式超宽带雷达协同探测网络构建、超宽带雷达生命迹象探测算法、分布式雷达节点探测数据融合方法等3个方面进行研究,对多雷达干扰抑制、分布式雷达节点自定位、微弱生命迹象稳健探测、废墟穿透定位误差补偿等关键技术难题提供了设计方案,为完成分布式超宽带雷达系统的研制奠定了技术基础。
分布式超宽带雷达 激光测距 Wi-Fi通信 地震被困人员探测
引言
中国地震多发,近年来发生了“5·12”四川汶川8级地震、青海玉树7.1级地震、四川芦山7.0级地震,均造成了巨大的人员伤亡和经济损失。据新华网统计,地震中95%以上的人员伤亡由建筑物倒塌废墟掩埋造成。根据历史大地震灾后救援的实践经验,在紧急救援的黄金72小时内,快速准确地获取废墟内被困幸存人员的位置分布是减少地震伤亡的关键(孔平等,2001;顾建华等,2003;陈维锋等,2003,2008)。
目前用来探测震后废墟中被困人员的技术手段主要有光学、声波振动、红热外等(张立军等,2006;侯培国等,2014)。除此之外,微波雷达也被证明是一种有效的技术手段,主要通过捕获被困人员小幅度的肢体抖动和微弱的呼吸信号实现探测,具有作用距离远、抗干扰性强、灵敏度高和多目标探测能力强等优点(徐雯琪,2006;赵伟等,2009)。但现有生命探测雷达受限于探测视角和作用距离,只适合在范围较小的废墟区域内使用,而用于大面积废墟时(如城镇大楼倒塌废墟),需要在废墟中选取多个位置点进行多次局部探测以覆盖整个废墟区域,这无疑降低了探测效率,而且在多点探测判断有被困人员幸存后,现有生命探测雷达也无法实现对废墟中被困人员进行三维定位。因此现有生命探测雷达难以快速准确地获取大面积废墟中被困人员的位置分布信息(Chen等,1986;Greneker,1998;朱文华,2010),严重影响地震救援效率。
分布式超宽带雷达协同探测技术被证明是解决大面积废墟下被困人员快速准确检测与定位难题的有效技术手段。目前国内已经有研究机构开始研究多点探测的分布式超宽带生命探测雷达协同探测技术(韩明华等,2013)。湖南华诺星空电子技术有限公司在2013年申请了一项名为“一种多模式自定位组网生命探测雷达方法和装置”的专利,该专利仅提出了分布式雷达协同探测的基本思想,但对其中的关键技术问题并未提出解决方案。首先,多个雷达节点均使用超宽带窄脉冲信号,同时工作存在相互干扰;其次,使用GPS对雷达节点进行定位,但民用领域GPS的精度约为5m左右,难以实现对废墟内被困人员的准确定位;另外,未考虑如何补偿废墟穿透引入的定位误差。因此国内对分布式超宽带雷达协同探测技术研究还处于起步阶段,在雷达节点自定位、多节点互扰抑制、废墟穿透定位误差补偿等方面还存在许多值得深入研究的关键问题。本论文即是从这些关键问题入手,提出切实可行的解决方案,建立分布式超宽带雷达协同探测技术体系,为完成分布式超宽带雷达系统的研制奠定了技术基础,以满足对震后废墟压埋被困幸存人员进行大范围快速搜索的现实需求。
1 分布式雷达的设计方案
分布式超宽带生命探测雷达系统主要由多个探测雷达节点和中心处理平台组成,其中雷达节点由步进变频雷达模块、激光测距模块和Wi-Fi通信模块组成,中心处理平台由数据处理与显控模块和Wi-Fi通信模块组成,如图1所示。各个模块的功能为:步进变频雷达模块用来产生、发射和接收步进变频连续波信号,该信号的使用避免了多个节点同时工作时的互扰;激光测距模块用来实现雷达节点的自定位;Wi-Fi通信模块用来传递节点探测数据和中心控制指令。
根据图1中分布式超宽带雷达系统在大面积废墟下进行被困人员协同探测的示意图,探测流程为:首先合理布置雷达节点1、2、3、4、5,Wi-Fi通信模块工作后,各节点加入中心处理平台无线局域网,数据通信网络搭建完成;然后,中心处理平台发送控制指令,各节点红外测距模块开始工作,测得各节点间距离,由无线数据通信网络发送给中心处理平台,以雷达节点1为坐标原点解算各雷达节点的位置;随后,中心处理平台发送控制指令,各雷达节点同时发射步进频率连续波信号,并将接收到的回波信号数据发送给中心处理平台;接下来,中心处理平台对各节点数据进行处理判断是否存在被困人员并计算获得在-平面的二维坐标;最后,使用另外的雷达节点6在二维坐标位置的废墟上向下探测,探测数据发送给中心处理平台处理后确定被困人员的压埋深度,即被困人员的坐标,并由图形化界面显示被困人员的三维位置分布,完成对被困人员的快速准确检测与定位。
根据上述探测流程分析,分布式超宽带雷达系统的总体方案框图如图2所示,其中单发单收两个超宽带天线用以超宽带步进变频信号的辐射和收集,雷达节点微控制器用来控制步进变频雷达模块、Wi-Fi通信模块和激光测距模块正常工作,中心处理平台MPU(Microprocessor Unit)和MCU(Microcontroller Unit)主要用以探测数据处理、处理结果显示和全系统控制。
1.1 步进变频雷达模块
1.1.1 步进变频发射机
对于步进变频信号的产生,现有两种主要的频率合成技术:锁相环技术PLL(Phase Locked Loop)和直接数字频率合技术DDS(Direct Digital Synthesizer)。DDS具有频率切换时间短、频率分辨率高、相位变化连续、相位噪声低、数字化程控灵活易实现任意波形信号等诸多优点,目前已在雷达系统中得到了广泛的应用,因此采用DDS实现步进变频发射机的设计。但是目前DDS无法直接产生的超宽带信号,只能采用混频或倍频的方式拼接生成,考虑到晶振的频率稳定性随着频率升高而降低,混频需要采用较高频率的参考信号,其频率稳定性较低,从而降低了输出信号的频谱准确性,同时混频会产生更多的杂散,需要采用高质量的滤波器滤波,增加了发射机的复杂度;虽然倍频对发射机相位噪声的恶化程度高于混频,但由于DDS能够实现很低的相位噪声水平,经过倍频后仍然易于满足相位噪声指标要求。

图1 分布式雷达协同探测示意图
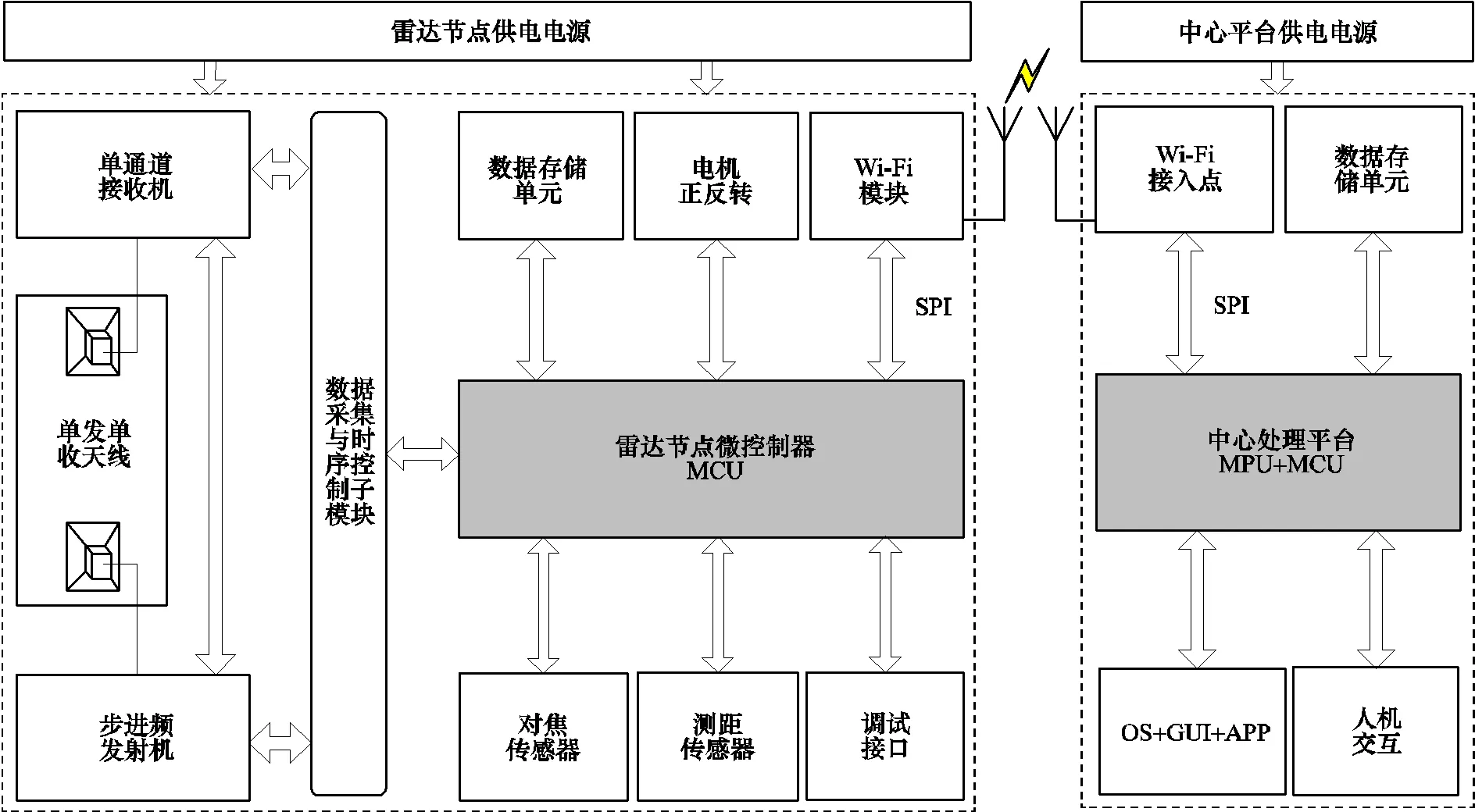
图2 系统总体方案框架
综上所述,本论文对DDS产生的不同频率的单频信号进行合理的倍频处理以产生超宽带步进频率信号,实现对频谱的精确控制。
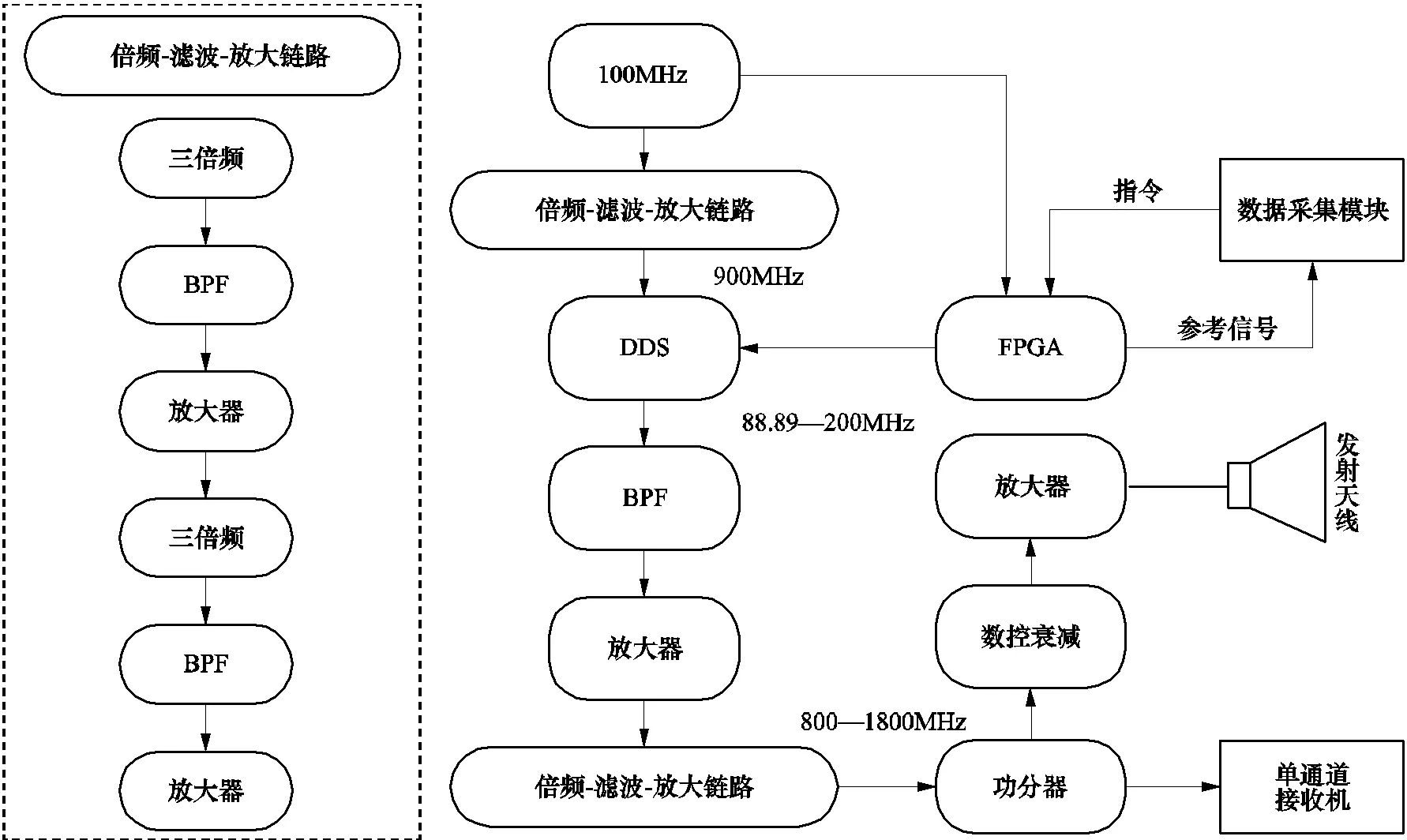
图3 步进变频发射机的设计方案
根据上述分析步进变频发射机的设计方案如图3所示,发射机的工作流程为:晶振输出100MHz的单频信号,通过倍频-滤波-放大链路得到900MHz的单频信号作为DDS的参考信号,利用数据采集模块送入的控制指令实现DDS输出频率范围为88.89—200MHz的步进频率信号,然后经过带通滤波器和放大器以消除杂散并放大至适合倍频-滤波-放大链路,再次通过倍频-滤波-放大链路输出频率范围为的步进频率信号,设置DDS输出步进频率信号的步长,由功分器将步进频率信号分成两路,其中一路本振信号送入单通道接收机进行下变频,另一路发射信号经数控衰减进行发射功率控制,进入发射天线进行辐射。
1.1.2 单通道接收机
单个接收天线配置的雷达节点,采用单通道接收机对接收天线采集的回波信号进行处理。对于接收机的结构,雷达系统主要采用超外差和零中频两种接收机结构,分别对应超外差接收机和直接变频接收机。由于超外差接收机存在结构复杂、成本高、体积大、功耗较高和干扰严重等缺点,因此探测雷达采用基于零中频结构的接收机,能够有效避免上述超外差接收机存在的问题,其存在直流干扰和IQ(Inphase载波,Quadrature phase载波)不平衡的问题能够方便地通过信号处理进行消除。
如图4所示的设计方案,单通道接收机的工作流程为:单个接收天线采集的回波信号并行进入对应的接收通道,首先通过低噪声放大器对回波信号进行放大以满足解调输入需求;然后利用发射机提供的本振信号进行IQ两路解调,直接下变频到IQ两路基带(零频)信号;最后采用运算放大器对IQ两路基带信号进行放大,作为数据采集模块的输入信号。
1.1.3 数据采集与时序控制子模块
步进变频雷达模块的数据采集与时序控制子模块主要完成3个功能:

图4 单通道接收机的设计方案
(1)对来自单通道接收机的IQ模拟基带信号进行AD(Analog-to-Digita)转化形成IQ数字基带信号;
(2)接收来自显控终端的控制参数,译码为控制指令调整系统各模块工作参数,保证系统按用户需求工作;
(3)对整个系统完成时序控制,保证发射机产生满足要求的步进频率连续波信号,并且同步数据采集与传输。
针对上述3个功能,根据确定的ADC(Analog-to-Digital Converter)采样位数和采样速率的指标,数据采集模块的方案设计如图5所示。

图5 数据采集与时序控制子模块方案图
1.2 激光测距模块
激光测距模块的基本思想是测得各终端间的距离和角度,解算雷达节点位置并且构建绝对坐标系。其中每个超宽带雷达节点上都有一个激光测距模块,包含两个对焦(收发)传感器和一个测距单元。每个测距模块工作时以一定的角速度在基座上进行360度内正反转,当与相邻终端均正确对焦后停止转动。


图6 雷达节点位置信息图


图7 直线定向示意图

即可根据点坐标算出点坐标,依次类推,确定其余各点的坐标。
1.3 Wi-Fi通信模块
针对分布式雷达节点与中心处理平台无线通信的需求,本论文采用无线Wi-Fi构建协同探测通信网络,其结构框图如图8所示。无线Wi-Fi通信网络主要负责分布式雷达节点探测数据向中心处理平台的上行发送和中心处理平台控制指令向分布式雷达节点的下行发送。

图8 无线Wi-Fi通信网络结构框图
中心处理平台下行发送至各个分布式雷达节点的控制指令主要用以控制激光测距模块有序工作与参数调整、步进变频雷达模块同时工作与参数调整,而由各个分布式雷达节点上行发送至中心平台的探测数据主要包括激光测距模块获取的距离和方位信息、步进变频雷达模块获取的目标回波数据。
1.4 生命迹象检测算法
为了保证在复杂废墟环境中对被困人员微弱生命迹象检测的稳定性,采用基于多脉冲积累的超宽带雷达生命迹象检测算法,算法处理流程如图9所示。其中,MTI(Moving Target Indicator)平均对消滤除强静止杂波,带通滤波抑制低高频强杂波,在杂波水平明显下降的条件下,再由FFT(Fast Fourier Transformation)多脉冲相干积累实现信噪比的大幅提升,保证二维恒虚警(CFAR,Constant False-Alarm Rate)检测具有较高的检测概率,实现被困人员的稳健检测,同时获取被困人员的距离信息,为后续协同探测网络进行被困人员三维定位提供必要条件。
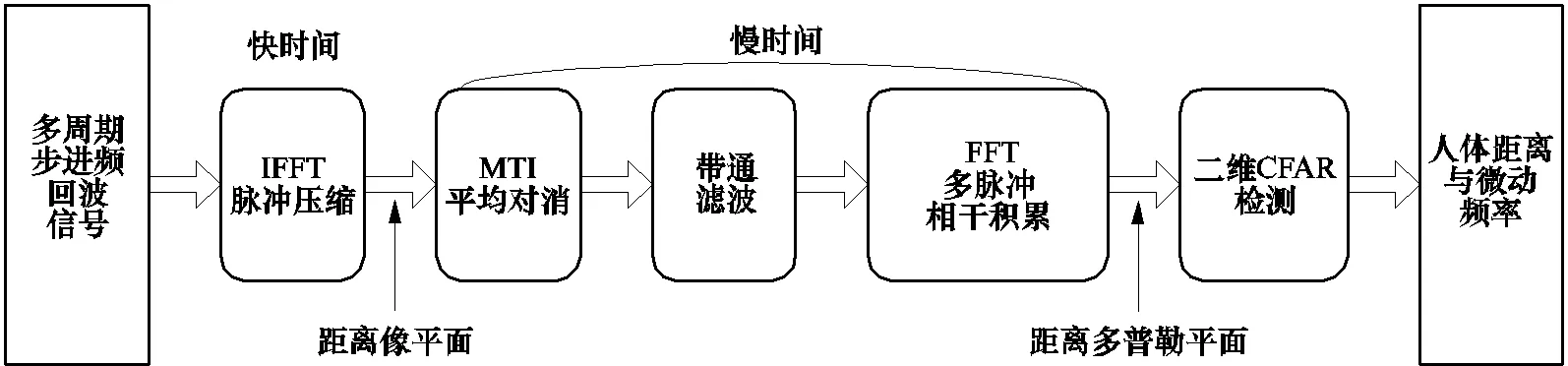
图9 基于多脉冲积累的超宽带雷达迹象检测算法流程图
1.5 定位误差补偿算法
在定位过程中,确定被困人员三维位置的过程分为两步,第一步:利用处于-平面的分布式雷达节点的立体测距结果确定被困人员位置的与坐标;第二步:在此坐标位置的废墟上方使用雷达节点向下探测,确定被困人员位置的坐标。但废墟穿透会造成立体测距误差,而利用立体测距结果解算与二维平面坐标本身也会带来定位误差,两者叠加可能造成严重的三维定位误差。所以本研究采用基于等效介质穿透和最小二乘融合的定位误差级联补偿算法,首先利用等效介质穿透的思路近似补偿每个雷达节点的立体测距误差;然后通过每两个雷达节点的目标距离测量值解算出存在误差的目标与坐标;最后利用已算出的与坐标,对由等效介质穿透和立体测距二维定位所引起的误差进行有效补偿,从而获得较为准确的被困人员的与坐标,也为后续准确确定坐标进而实现对被困人员的准确定位提供了保障。
1.5.1 基于等效介质穿透的距离补偿算法
电磁波穿透废墟介质时会发生传播路径扭曲的现象,导致从雷达节点回波信号中提取的目标距离信息存在误差,从而引起定位误差。距离补偿的关键是对废墟介质电磁传播特性进行准确描述,但废墟通常是地板、墙体、天花板等多种建筑材料堆积而成,属于复合非均匀介质,无法准确描述其电磁传播特性,因此无法进行精确的距离补偿。本论文采用基于等效介质穿透的距离补偿算法,将复合非均匀介质等效成单层均匀介质来对待,其等效介电常数根据对典型地震废墟进行多次测量统计得出,基于此进行距离补偿,算法流程如图10所示。

图10 基于等效介质穿透的距离补偿算法
根据图10所示的算法处理流程,首先对多周期步进变频连续波信号脉压之后形成的距离像平面中多个脉冲进行相加积累,提取最大幅值对应的距离信息作为废墟表面距离(废墟表面为第一层反射面,回波幅度最大);然后利用基于多脉冲相干积累的生命迹象检测算法提取被困人员的距离信息;随后用被困人员距离减去废墟表面距离即为废墟穿透距离,利用测得的等效废墟介质介电常数对其进行距离补偿;最后将补偿后的废墟穿透距离与废墟表面距离相加得到近似补偿后的被困人员距离。
1.5.2 基于最小方差融合的定位误差补偿算法
利用等效介质穿透补偿算法求得雷达节点到目标的距离后,对于协同探测网络内任意两个雷达节点使用两圆交叉定位方法即可将目标距离转换为目标在-平面上的位置信息。但由于被困人员处于废墟中的三维空间中,测得的距离信息包含了人体坐标的影响,造成定位出的目标二维位置偏离目标真实位置,如图11所示。针对协同探测网络确定的多个目标二维位置误差的互补特性,本文采用基于最小方差融合的定位误差补偿算法,利用最小方差线性加权融合策略合并多个目标二维位置,既能够补偿立体测距带来的固有定位误差,又能够抑制等效介质补偿残留距离误差带来的定位误差。

图11 目标立体测距示意图
对于协同探测网络产生的多个带有误差的被困人员二维坐标(,),最小方差线性加权融合的基本原理为:假设1、2是被困人员坐标的两个估计结果,其期望、方差表示为:

则最小方差线性加权融合后的被困人员坐标为:


通过上述公式可见最小方差线性加权融合是对两个坐标估计值进行加权,且误差越大,加权值越小,也即对融合坐标值的贡献越小。因此利用同样的方法对纵坐标进行融合,得到误差补偿后的目标的y值。
图12中给出了本算法的仿真结果,仿真中设置了6个雷达节点在高度为0的平面内,即雷达节点的坐标为0,目标的三维坐标为=1m,=6m,=2m,直接用6个节点到目标的三维坐标距离进行定位。仿真结果显示,每两个节点的定位结果(圆点)均明显偏离了目标真实位置(星号),通过最小方差线性加权融合得到的结果(圆圈)十分接近目标真实位置(星号),验证了算法的可行性。
1.6 数据处理与显控模块设计
中心处理平台的主要构成部分是数据处理与显控模块,主要实现对分布式雷达节点探测数据处理、被困人员探测结果显示以及人机交互。本研究采用ARM(Constant False-Alarm Rate)微处理器和DSP(Digital Signal Processing)处理芯片设计数据处理与显控模块,其中DSP主要负责对探测数据处理,而ARM主要负责探测结果显示与人机交互。该模块的基本结构如图13所示。
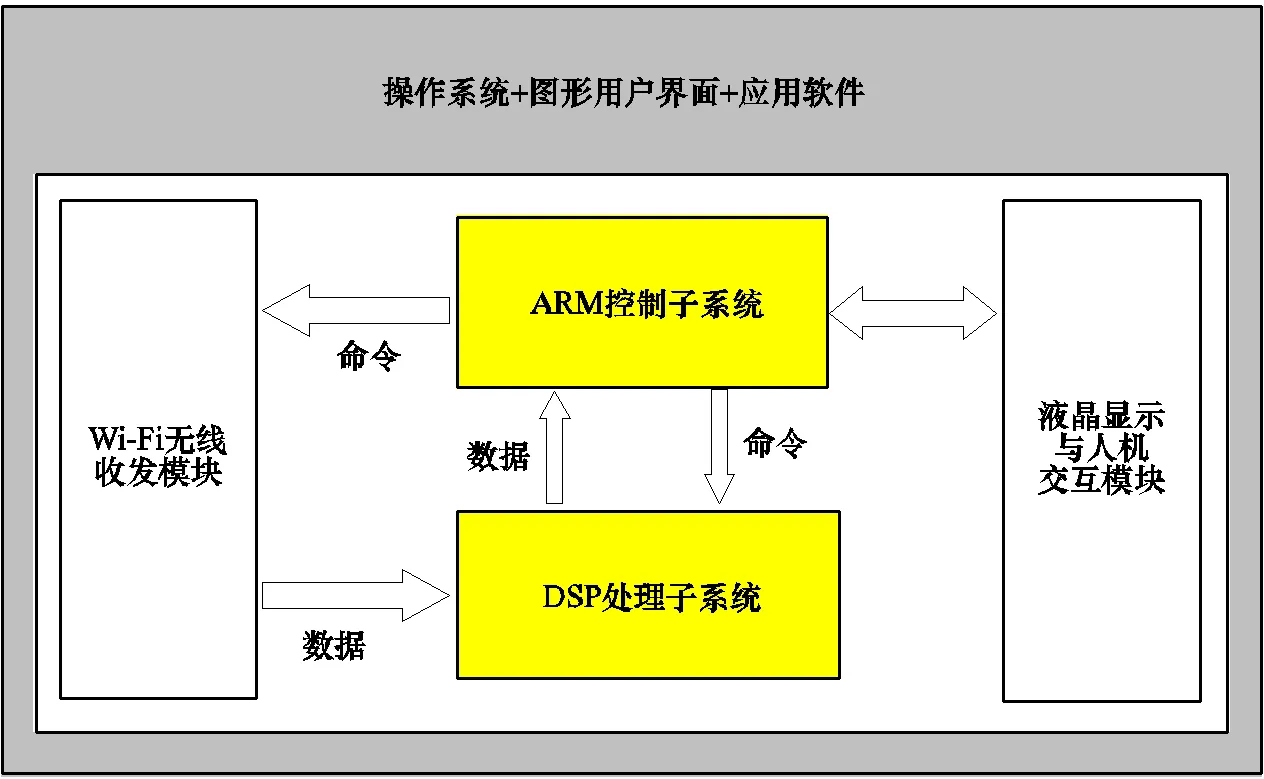
图13 数据处理与显控模块
如图13中所示,ARM系列的高性能低功耗微控制器作为控制子系统,高性能数字信号处理器(DSP)作为数据处理子系统。数据处理与显控模块采用多处理器协同工作的方式。首先响应用户通过人机交互(触摸屏和按键)的方式输入命令和操作,控制无线通信部分传输探测数据到显控中心的数字信号处理器(DSP)进行相关处理,然后控制系统将处理后的数据通过显示界面实时的呈现给用户。操作系统部分采用目前比较流行的LINUX或者Android系统,方便移植和维护;在此系统上拟设计的人机交互图形化界面概念图如图14所示,左侧显示各雷达节点的工作状态,中间主显示区主要显示各雷达节点的位置和被困人员的位置,右侧为人机交互控制面板。
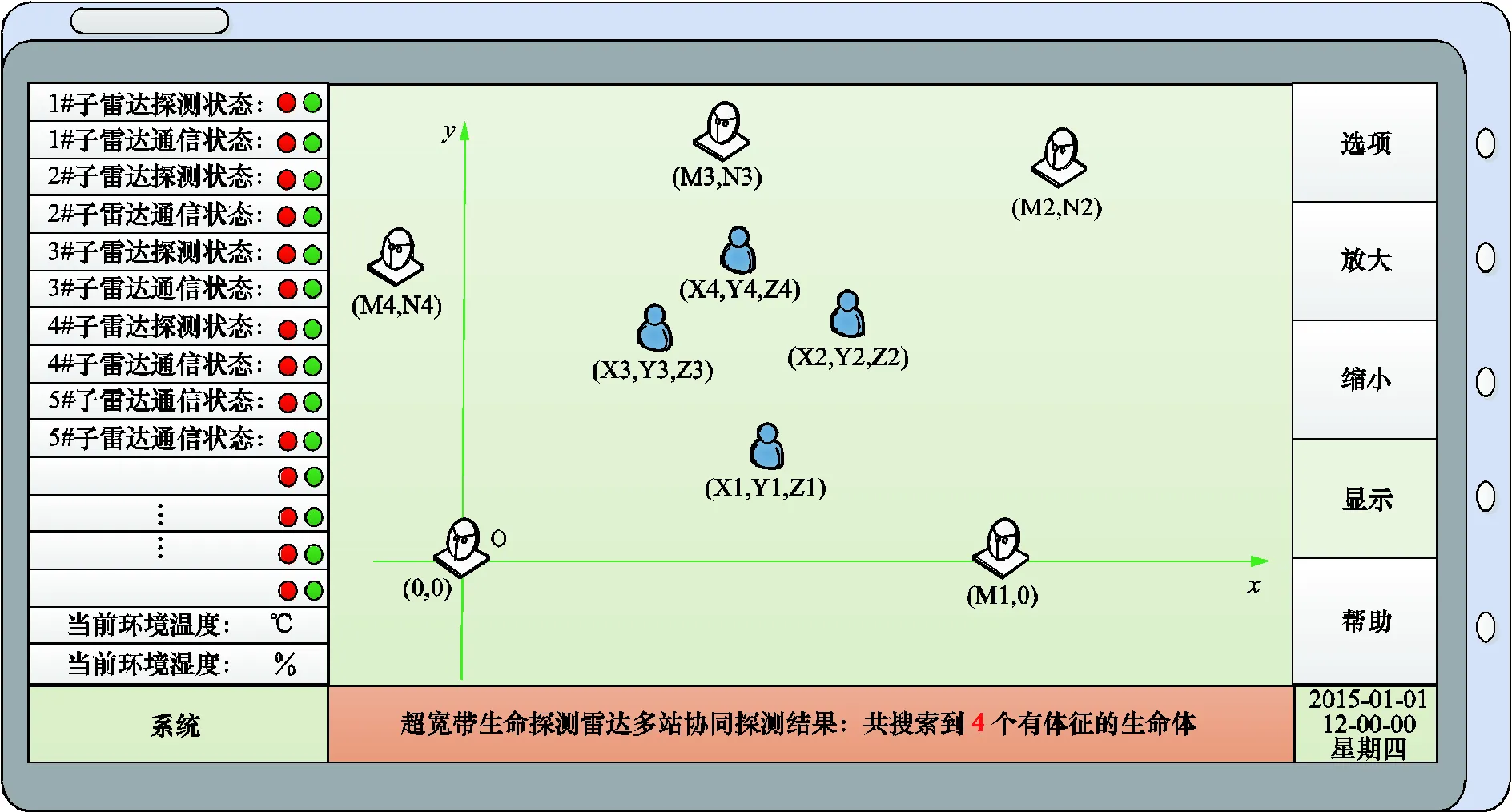
图14 人机交互图形化界面概念图
2 结束语
本论文讨论了分布式超宽带雷达地震被困人员协同探测技术,给出了直接数字式步进变频发射机、零中频接收机和数据处理与显控模块的技术方案,并对多脉冲相干积累的超宽带雷达生命探测算法和基于等效介质穿透与最小方差融合的定位误差级联补偿算法提供了流程,为分布式雷达系统的研制奠定了基础,有助于提升地震救援的技术水平。
陈维锋,彭晋川,顾建华等,2003.地震救助生命搜索与定位技术研究进展.地震地磁观测与研究,24(6):89—94.
陈维锋,王云基,顾建华等,2008.地震灾害搜索救援理论与方法.北京:地震出版社.
顾建华,王云基,陈维锋等,2003.搜索理论与建筑物评估和标记问题的讨论.国际地震动态,(7):5—12.
韩明华,吴锋涛,王生水等,2013.一种多模式自定位组网雷达生命探测方法和装置:中国,201310019228.0. 2013-01-18.
侯培国,李宁,宋涛,2014.生命探测技术研究现状与发展.传感器与微系统,33(7):1—3,8.
孔平,任利生,2001.地震应急救助技术与装备概论.北京:地震出版社.
徐雯琪,2006.生命搜索中超声探测的机理研究及超声探生仪的初步设计.成都:成都理工大学.
张立军,郭勇,江勇,2006.便携式声波振动探生仪实用化设计.仪器仪表用户,13(4):102—103.
赵伟,黄春琳,2009.生命探测技术研究.见:2008年中国高校通信类院系学术研讨会论文集(下册).北京:电子工业出版社.
朱文华,2010.生命探测雷达显示控制器软件设计.西安:西安电子科技大学.
Chen K. M., Misra D., Wang H., et al., 1986. An X-band microwave life-detection system. IEEE Transactions on Biomedical Engineering, 33(7): 697—701.
Greneker E. F., 1998. Radar flashlight for through-the-wall detection of humans. In: Proceedings of SPIE, 3375 Targets and Backgrounds: Characterization and Representation IV. Orlando, FL: SPIE, 280—285.
Collaborative Detection Technology for Detecting Trapped Personnel by Distributed UWB Radar Earthquake
Sun Gongde, Guo Yong, Shen Jian, Zhao Leiting and Zhang Zhongyuan
(College of Information Science and Technology, Chengdu University of Technology, Chengdu 610059, China)
In this paper, a distributed ultra-wideband radar cooperative detection technology is proposed, which mainly includes the construction of distributed ultra-wideband radar cooperative detection network and the detection of UAV radar life signs. We studied the algorithm, distributed radar node detection data fusion method, and designed the distributed ultra-wideband life detection radar system, multi-radar interference suppression, distributed radar node self-localization, weak life signs robust detection, ruin penetration positioning error compensation. The results provide a technical base, in order to complete the development of distributed ultra-wideband radar system in the future.
Distributed ultra wideband radar; Laser ranging; Wi-Fi communication; Earthquake trapped detectors
10.11899/zzfy20170424
“十二五”国家科技支撑计划课题“城镇地震灾害应急处置关键技术研究”(2015BAK18B03);成都理工大学2016中央财政支持地方发展专项“现代信息检测及智能处理技术学科建设”;国家自然科学基金面上项目“分布式超宽带雷达地震被困人员协同探测技术研究”(41574136)
2017-04-12
孙公德,男,生于1993年。硕士研究生。主要从事生命探测雷达信号处理。E-mail:664932201@qq.com
孙公德,郭勇,沈建,赵蕾莛,张忠元,2017.分布式超宽带雷达地震被困人员协同探测技术.震灾防御技术,12(4):966—977.