4PZ-1型自走式酿酒葡萄收获机的研制与试验
2017-01-17杨兰涛王丽红李成松袁盼盼
杨兰涛,王丽红※,坎 杂,李成松,袁盼盼,王 哲
(1. 石河子大学机械电气工程学院,石河子 832003;2. 新疆农业大学机械交通学院,乌鲁木齐 830052)
4PZ-1型自走式酿酒葡萄收获机的研制与试验
杨兰涛1,王丽红1※,坎 杂1,李成松1,袁盼盼2,王 哲1
(1. 石河子大学机械电气工程学院,石河子 832003;2. 新疆农业大学机械交通学院,乌鲁木齐 830052)
针对新疆人工采收酿酒葡萄劳动强度大、效率低下,缺乏适应新疆酿酒葡萄种植模式的收获装备问题,研制了一种自走式酿酒葡萄收获机。该机采用全液压驱动,主要由振摇分离机构、收集输送机构及自走式液压底盘三大部件组成,一次作业1行,可一次性完成对酿酒葡萄的分离、输送、除杂及收集作业。田间试验结果表明:在地形平坦,酿酒葡萄含糖量达到18%的情况下,该机以2 km/h的速度进行收获作业时可获得较佳采收效果,该速度下主要指标平均生产率为0.6 hm2/h,平均果实采净率为93.8%,平均果实破损率为9.3%。该研究可为推动中国酿酒葡萄收获机的国产化进程提供参考。
农业机械;设计;农作物;收获机;振摇分离;酿酒葡萄;结构
0 引 言
新疆是中国最早引种和栽培葡萄的地区[1-2],其独特的气候和地理位置环境非常适宜葡萄的生长[3]。近年来,新疆大力发展特色产业和进行农业结构调整,葡萄产业得到快速健康的发展,葡萄种植面积不断扩大[4]。据报道,2015年新疆酿酒葡萄种植面积已超过40 000 hm2,位居中国第一[5]。但目前新疆酿酒葡萄的采收完全依靠人工,采收季节人工用量占葡萄生产全程的30%~50%[6-7],已经严重制约了酿酒葡萄产业的发展,酿酒葡萄的机械化采收已成为必然趋势[8-12]。
国外酿酒葡萄机械化收获作业试验起源于1952年的美国加利福尼亚[13-14],目前欧美国家大面积酿酒葡萄已经实现机械化收获作业,技术较为成熟[15]。现有葡萄及类似浆果采收机械的基本原理主要是通过对浆果植株施加振动,使果粒克服与果蒂的连接力发生分离以实现采收[16-20],该方法可实现连续、大面积采收作业。
尽管新疆酿酒葡萄的品种、栽培架式与欧美国家基本一致,但由于新疆酿酒葡萄需掩埋越冬,其树形大多为多主蔓扇形,而国外酿酒葡萄树形主要为主干形,2种树形在果实分布、振动传递衰减等方面差异较大,故国外酿酒葡萄收获机并不能直接应用于中国新疆酿酒葡萄的采收。本文针对新疆酿酒葡萄多主蔓扇形树形的特点,设计了一种自走式酿酒葡萄收获机,期望推动中国酿酒葡萄收获机的国产化进程。
1 总体结构与工作原理
1.1 总体结构
4PZ-1型自走式酿酒葡萄收获机主要由自走式液压底盘1、振摇分离机构2、收集输送机构3、风机4及料箱5等工作部件组成(如图1所示),该机主要设计技术参数如表1所示。
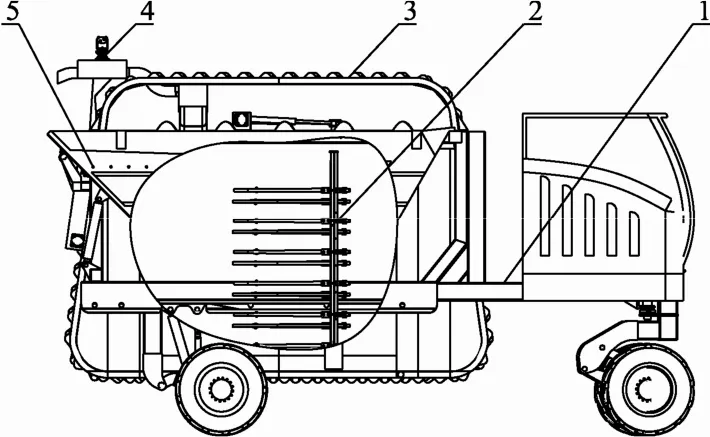
图1 4PZ-1型自走式酿酒葡萄收获机结构示意简图Fig.1 Structural diagram of 4PZ-1 self-propelled wine grape harvester
1.2 工作原理
工作时,该机骑跨于葡萄行上方进行作业,一次作业 1行。整机向前行走作业时葡萄植株进入到振摇分离机构2,振摇分离机构通过振摇葡萄植株使葡萄颗粒从葡萄藤上脱落,脱落下来的葡萄粒及部分杂质掉落于下方收集输送机构 3的柔性料斗内,并随着收集输送机构顺时针转动,直至葡萄粒及杂质经出料口落入料箱 5内。葡萄粒及杂质在从收集输送机构落入料箱的过程中,风机 4将小于葡萄悬浮速度的葡萄叶等杂质进行清除。待料箱收集满葡萄粒后,液压系统控制料箱下方升降油缸将葡萄粒倾倒于运输车辆车厢内,然后收获机继续工作。整个作业过程中,自走式液压底盘 1为整机的工作及行走提供动力并控制整机工作参数。

表1 4PZ-1型自走式酿酒葡萄收获机主要设计技术参数Table 1 Main design parameters of 4PZ-1 self-propelled wine grape harvester
2 主要工作部件的设计
2.1 振摇分离机构设计
新疆酿酒葡萄树形为多主蔓扇形,其特点为叶幕较宽,葡萄串分布较散,振动衰减较快,设计酿酒葡萄振摇分离机构时,既要保证分离机构振摇部件具有较大的振动摆幅,以克服葡萄藤振动能量衰减快,传递效率低的问题,又要使其振摇部件无序振动较小,以降低对葡萄果实及植株的损伤。
结合国内外单点支撑式和双点支撑式中枢振动机构特点[21-24],设计了如图2a所示的肋条末端驱动式振摇分离机构。该机构通过末端驱动肋条组件的方式周期性振摇葡萄植株,实现酿酒葡萄果粒与果蒂的分离,即减少了肋条组件的无序振动,又可实现肋条组件一种大振幅运动,可满足新疆酿酒葡萄的机械化采收要求。该机构主要由主动轴1、偏心套2、机架4、肋条组件8等部件组成。
图2a中偏心套2、调节连杆3、振动摇杆10同机架4组成一对曲柄呈180°其余杆件对称布置的2转动副(revolute pair)和2球面副(spherical pair)构成的空间四杆机构,以下简称RSSR空间四杆机构;主动摇杆6、连杆7、肋条组件8以及机架组成双摇杆平面四杆机构,该装置作业部分由多对该类型平面四杆机构组成,并在空间位置上呈错位分布;RSSR空间四杆机构的振动摇杆以及多个平面四杆机构中的主动摇杆与主动摇杆转动轴固结,多个双摇杆平面四杆机构中的肋条组件与从动摇杆转动轴固结。由RSSR空间四杆机构及单组双摇杆平面四杆机构构成的振摇分离机构结构简图如图2b所示。
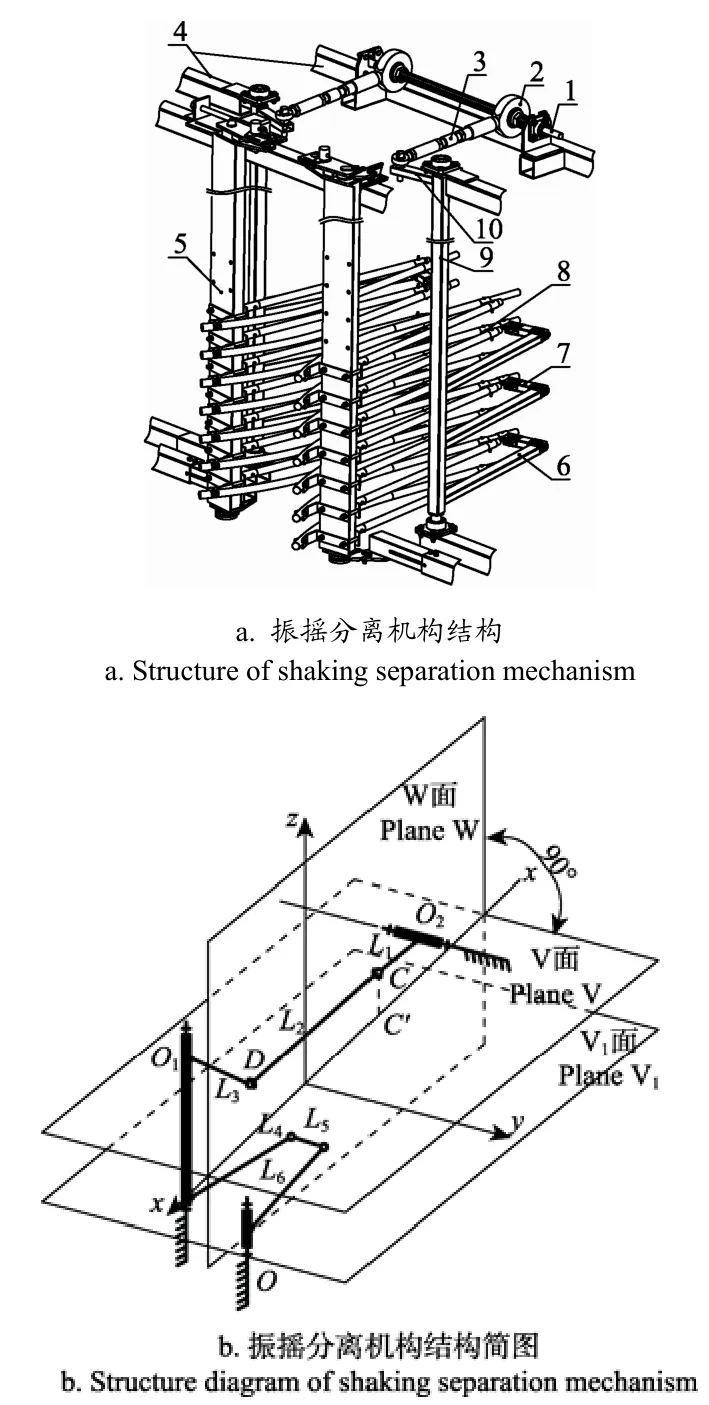
图2 振摇分离机构结构示意图Fig.2 S tructural schematic diagram of shaking separation mechanism
工作时,RSSR空间四杆机构将主动轴1的旋转运动转变为振动摇杆的摆动运动,并通过主动摇杆转动轴将摆动运动传递至平面四杆机构的主动摇杆,主动摇杆强迫摆动肋条组件末端带动肋条组件进行往复运动,将振动运动通过葡萄植株及果穗传递至葡萄果蒂,迫使果粒发生瞬时变向运动,产生克服果蒂连接力的惯性力使果-蒂发生分离,实现采收。
整机工作过程中,在葡萄植株喂入振摇分离机构时,两侧的肋条组件对葡萄藤进行聚拢压缩后振摇,以提高振动能量传送至葡萄果蒂处的效率,实现更好的采收效果。其中,肋条组件采用具有一定弹性的尼龙材料,以减少对葡萄植株的损伤及篱架立柱的有害振动反馈。
为确定影响振摇分离机构对葡萄植株振动力的因素,在图2b的基础上分别建立了振摇分离机构当量平面机构(如图3所示)及平面双摇杆四杆机构的运动示意图(如图4所示)。
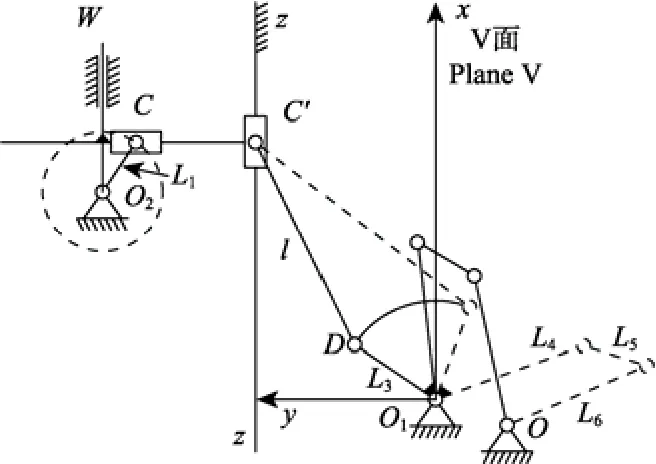
图3 振摇分离机构当量平面机构Fig.3 Equiv alent planar body of shaking separation mechanism

图4 平面双摇杆机构运动示意图Fig.4 Schematic diagram of flat double rocker mechanism motion
式中J3为肋条组件、从动摇杆转动轴等工作部件转动惯量,kg·m2;α3为肋条组件角加速度,rad/s2;R表示葡萄植株到两从动摇杆转动轴轴线平面的距离(图4中O、E点间距),m。
经前期分析可知,影响振摇分离机构对葡萄植株振动力F3的主要因素为主动轴转速ω、振动摇杆长度L3以及O、E点间距R。
结合项目组前期研究基础[25-26]可知,酿酒葡萄采摘试验装置主动轴转速为750 r/min、振动摇杆长度为125 mm、振动位置为550 mm时,分离效果较好,而当葡萄振动频率范围为2.11~3.69 Hz,葡萄穗梗处振幅为169.8 mm时,可达到酿酒葡萄较佳的果蒂分离率。因此,收获机实际采收过程中,振摇分离机构采用以上作业组合参数。
2.2 收集输送机构设计
酿酒葡萄收获机收集输送机构由双侧对称的两条呈“回”形的双铰接输送链轨道组成,链轨道主要由导轨1、接料斗2、顶部挡板3、两侧挡板6、双铰接链7、驱动装置8及后挡板9等部分组成,如图5所示。
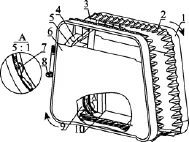
图5 收集输送机构结构Fig.5 Structure of collecting and conveying mechanism
整机骑跨在葡萄行上进行作业时,收集输送机构的导轨1均布在葡萄藤的两侧,两侧的柔性接料斗2紧贴葡萄藤两面,在重力作用下采收的酿酒葡萄粒向下运动全部掉落至下方柔性接料斗内。驱动装置8驱动双铰接链7运动,接料斗在双铰接链的带动下以顺时针方向转动,在后挡板9及顶部挡板3的贴合护送下将酿酒葡萄粒输送至出料口4进入料箱。其中,后挡板、顶部挡板与柔性接料斗紧密贴合形成封闭空间,以防止葡萄粒在运输过程中掉落。两侧的导轨底部向内侧平行收缩,两侧双铰接链上的柔性接料斗在安装时预设一定挤压力,且相互交错,形成一密闭底部,确保收集输送机构工作时的可靠性。
为保证收集输送机构不刮伤葡萄植株且不被损伤,双铰接链的线速度同整机行走速度大小相等,方向相反,因此其速度调整范围设为1~3 km/h,驱动装置主动轮转速设为40~120 r/min。若以每公顷产量为13 500 kg,酿酒葡萄种植行距为3 m为例进行计算可求得每行葡萄内每米约有葡萄4 kg,于是为确保分离后的酿酒葡萄颗粒都能够被收集且输送到料箱,将底部接料斗容纳空间提高20%(防止其他杂质占用空间),得到收集输送机构主要结构参数:底部接料斗区域宽800 mm,前后长1 200 mm,每个料斗容积为0.08 m3。
2.3 自走式液压底盘设计
自走式液压底盘在该酿酒葡萄收获机的作业过程中主要承担为整机的工作及行走提供动力并调整整机作业参数,以满足不同收获环境需求。
自走式液压底盘结构主要由升降机构1、底盘机架2、发动机3、转向机构4及驾驶室5等组成(如图6所示)。为适应整机骑跨式作业,底盘机架采用龙门式框架结构,驾驶室布置在机架左前方,发动机及液压泵布置在机架右前方。自走式液压底盘采用四轮驱动及前轮转向的行走控制方式,以防止行走轮在地间凹陷,提高了整机的通过性。为适应不同作业环境收获需要,该底盘四轮均采用折叠式升降机构,工作时,根据葡萄串在垂直方向上的分布,通过升降机构可调整整机高度以达到较佳作业状态,在道路行驶时,升降机构又可降低整机重心,保证整机行走的稳定性。
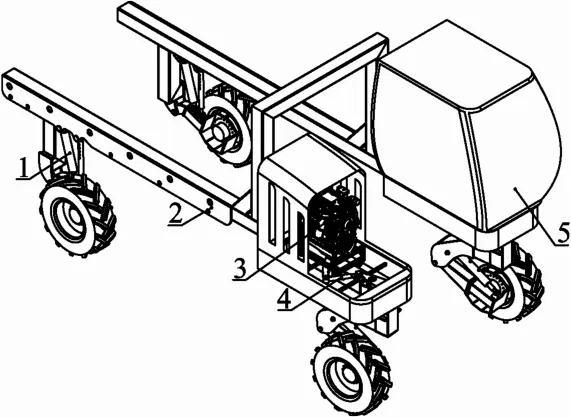
图6 自走式液压底盘结构Fig.6 Structure of self-propelled hydraulic chassis
3 液压系统
收获机体积庞大,为实现精准的传动效果,适应复杂的作业环境,本机采用液压传动进行整机的驱动与控制。该液压系统由振动马达回路 1、输送及风机马达回路2、卸料油缸控制回路 3、车身调整回路 4、以及全液压行走回路5等组成(如图7所示),其中全液压行走回路采用闭式回路,其他4个部分采用开式回路,各回路的油泵动力均来自于发动机。节流阀安装在进油油路中,可起到节流调速的作用,使运动部件动作平稳,有利于提高执行元件的工作稳定性。

图7 液压原理图Fig.7 H ydraulic principle diagram
4 田间试验
4.1 试验条件
4PZ-1型自走式酿酒葡萄收获机由石河子开发区石大锐拓机械装备有限公司生产,样机配套发动机功率为70 kW、外形尺寸为5 700 mm×4 100 mm×5 150 mm(长×宽×高)。该样机于2015年在新疆生产建设兵团第八师144团葡萄机械化关键技术试验示范园进行了田间试验(如图8所示),参照《农业机械试验条件测定方法的一般规定》[27],对收获期赤霞珠品种酿酒葡萄的田间状况进行调查,得到收获机田间试验条件如表2所示。
4.2 试验方法
根据农业部行业标准《葡萄栽培和葡萄酒酿制设备葡萄收获机试验方法》[28]对收获机现场作业性能进行测试,主要选取收获机的生产率、平均果实采净率、平均果实破损率3个性能指标进行测试,同时考察整机各部件工作性能。

图8 样机田间试验Fig.8 Prototy pe field experiment

表2 4PZ-1型自走式酿酒葡萄收获机试验条件Table 2 4PZ-1 self-propelled wine grape harvester test condition
4.3 试验结果与分析
由田间试验结果可知,该酿酒葡萄收获机可完成对新疆酿酒葡萄的收获作业,且在地形平坦,酿酒葡萄含糖量达到18%的情况下,自走式酿酒葡萄收获机以2 km/h的速度进行作业时可获得较佳收获效果。与国外部分酿酒葡萄收获机[20,29-30]相关作业性能指标对比分析可知(如表3所示),该机平均生产率为0.6 hm2/h,平均果实采净率为93.8%,平均果实破损率为9.3%,已基本达到国外酿酒葡萄机采水平,但平均果实破损率略高,其主要原因为国内外作业环境条件相差较大,国外葡萄果实挂果较为集中,振动部件可通过振动葡萄主干以避免直接击打葡萄果实而造成果实破损,而新疆酿酒葡萄果实分布较散,若想实现采收,振动肋条不可避免地要与葡萄果实发生接触[31],故破损率较高。但通过对葡萄酒厂调研可知,葡萄粒破损后若能在8~10 h内进行加工,对葡萄酒品质影响不大。
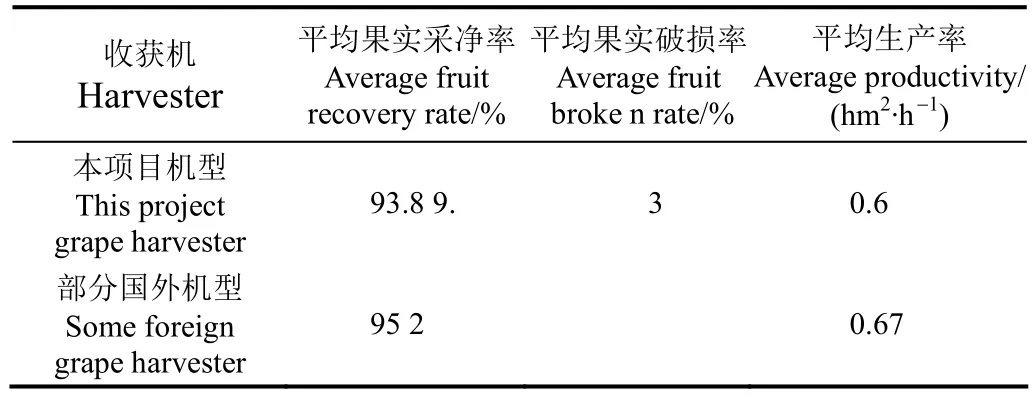
表3 酿酒葡萄收获机主要性能指标对比Table 3 Main performance index contrast of wine grape harvesters
该机在田间作业时主要存在问题如下:1)该机清选除杂过程主要由风机完成,含杂率较高,后期预在收获机清选除杂方面展开研究,研发适用于该酿酒葡萄收获机的清选除杂装置,以降低葡萄果实含杂率,提高整机收获质量;整机作业性能稳定性与可靠性尚待进一步提高;2)葡萄行地头回旋半径过小,收获机作业时转弯掉头困难,影响整机工作效率;葡萄行水泥立柱外形尺寸过大,易倾斜,抗震性差,易对收获机振摇分离机构肋条造成磨损,并且不利于整机通过,影响收获机的作业流畅性。
5 结 论
本文研制了一种自走式酿酒葡萄收获机,可一次性实现对酿酒葡萄的分离、输送、除杂及集果等功能,减少了作业成本,降低了劳动强度。
该机振摇分离机构通过末端驱动肋条组件的方式实现肋条组件一种大振幅、小无序振动的振摇效果,可满足新疆酿酒葡萄机械化采收要求;该机收集输送机构采用导轨支撑的双铰接链输送形式,“回”形圆弧导轨缩短了输送路线,两侧接料斗采用柔性材料并紧密啮合避免了整机作业过程中伤树及漏果问题;该机自走式液压底盘采用四轮驱动及前轮转向的行走控制方式,四轮均采用折叠式升降机构,提高了整机的通过性及灵活性。
经田间试验验证表明,该机以2 km/h的速度进行作业时可获得较佳收获效果,该速度下平均生产率为0.6 hm2/h,平均果实采净率为93.8%,平均果实破损率为9.3%,已基本达到国外酿酒葡萄机采水平。
该机田间作业性能可靠性与稳定性以及清选除杂设备有待改进优化;部分葡萄栽培农艺并不利于收获机作业,后期应改进与规范,以使农艺更好地服务农机。
[1] 刘俊.张家口市葡萄产业发展建议[J].河北林业科技,2013(2):44-54.Liu Jun. The d evelopment suggestion of Zhangjiakou grape industry[J]. Hebei Forestry Science and Technology,2013(2):44-54.(in Chinese with English abstract)
[2] 陈习刚.葡萄、葡萄酒的起源及传入新疆的时代与路线[J].古今农业,2009(1):51-61.Chen Xigang. On the origin o f grap e and gr ape win e and their s pread time and rout e to Xinji ang[J]. Ancient and Modern Agricu lture,2009(1):51-61.(in C hinese wi th English abstract)
[3] 蒲胜海,张计峰,丁峰,等.新疆葡萄产业发展现状及研究动态[J].北方园艺,2013(3):200-203.Pu Haisheng,Zhang Jifeng,Ding Feng,et al. Development status and research emphases of the grape industr y in Xinjiang[J]. Northern Horticulture,2013(3):200-203.(in Chinese with English abstract)
[4] 赵中华.新疆葡萄生产机械应用现状及发展方向[J].农业技术与装备,2008(4):33-34.Zhao Zhonghua. Application status and development direction of Xinjiang gr ape production machin ery[J]. Agricu ltural Technology and Equipment,20 08(4):33-34.(in Chinese with English abstract)
[5] 糖酒门户网.新疆酿酒葡萄种植面积位居全国第一[EB/OL].(2015-09-17)[2015-11-01].http://www.cntjmh.c n/news/19754612.html.
[6] Sanders K F. Orange harvesting systems review[J]. Biosystems Engineering,2005,90(2):115-125.
[7] 陈度,杜小强,王书茂,等.振动式果品收获技术机理分析及研究进展[J].农业工程学报,2011,27(8):195-200.Chen Du,Du Xiaoqiang,Wang Shumao,et al. Mechanism of vibratory fruit harvest and rev iew of current adv ance[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions o f the CSAE),2011,27(8):1 95-200.(in Chinese with English abstract)
[8] 曲淑丽,杨先遇.烟台市葡萄生产机械化实践与探讨[J].农业机械,2010(14):22-23.
[9] 胡志超,田立佳,彭宝良.国内外葡萄生产机械化的研究与应用[J].新疆农机化,2010(4):48-49.
[10] 冯玉磊,坎杂,李成松,等.基于振动原理的酿酒葡萄采摘试验装置的设计[J].江苏农业科学,2013,41(11):404-406.Feng Yulei,Kan Za,Li Ch engsong,et al. Design of wine grape picking test device based on mechanics of vibration[J]. Jiangsu Agricultural Sc ience,2 013,41(11):40 4-406.(in Chinese with English abstract)
[11] 袁盼盼,王梦,张学军,等.酿酒葡萄收获机输送装置试验[J].农机化研究,2016,38(12):198-201,259.Yuan Panpan,Wang Meng,Zhang Xuejun,et al. Experiment of wine gr ape harvester conveyer[J]. Journal of Agricultural Mechanization Research,2016,38(12):198-201,259.(in Chinese with English abstract)
[12] 袁盼盼,张学军,坎杂,等.末端驱动式酿酒葡萄分离机构的设计及分析[J].农机化研究,2016,38(9):104-107.Yuan Panpan,Zhang Xuejun,Kan Za,et al. Design and analysis of en d driven s eparation m echanism for wine grape[J]. J ournal of Agri cultural M echanization Res earch,2016,38(9):104-107.(in Chinese with English abstract)
[13] 胡志超,王海鸥,胡良龙,等.美国葡萄生产机械化[J].中国农机化,2005(6):107-109,104.
[14] 李超,邢洁洁,徐丽明,等.柔性梳脱式酿酒葡萄脱粒机构设计与试验[J].农业工程学报,2015,31(6):290-296.Li Ch ao,Xing J iejie,Xu Liming,et al. Design and experiment of wine grape threshing mechanism with flexible combing strip ing monomer[J]. Transactions of th e Chinese Society of Agr icultural Eng ineering(Transactions of th e CSAE),2015,31(6):290-296.(in Ch inese with English abstract)
[15] 李成松,冯玉磊,王丽红,等.国外酿酒葡萄收获机振动采摘部件结构及应用现状[J].江苏农业科学,2014,42(3):335-337.Li Chengsong,Feng Yulei,Wang Lihong,et al. Analysis of structure and application status of th e for eign wine gr ape harvester vibr ation separ ate parts[J]. Jia ngsu Agric ultural Science,2014,42(3):335-337.(in Chin ese with English abstract)
[16] 张克孝,林素元,许家美.黑豆果机械采收工作部件的理论分析[J].农业工程学报,1986,2(4):87-95.Zhang Kexi ao,Lin Suyuan,Xu J iamei. Th e theor etical analysis of th e harvest m achine parts for bla ck currant[J]. Transactions o f the Chin ese Socie ty of Agricultural Engineering(Transactions of the CSAE),1986,2(4):87-95.(in Chinese with English abstract)
[17] 王业成,陈海涛,邱立春.黑加仑干枝的试验模态分析[J].农业工程学报,2011,27(14):45-49.Wang Yecheng,Chen Haitao,Qiu Lichun. Modal experiment analysis on blackcurran t bran ches[J]. Trans actions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),201 1,27(14):45-49.(in Chinese with English abstract)
[18] 王业成,陈海涛,林青.黑加仑采收装置参数的优化[J].农业工程学报,2009,25(3):79-83. Wang Yech eng,Chen Haitao,Lin Qing. Optimization of parameters of black currant harves ting mechanism[J]. Transactions o f the Chin ese Socie ty of Agricultural Engineering(Transactions of the CSAE),2009,25(3):79-83.(in Chinese with English abstract)
[19] 王丽红,袁盼盼,李成松,等.酿酒葡萄振动脱落机构运动分析及研究平台设计[J].农机化研究,2015,37(8):53-56,61.Wang Lihong,Yuan Panpan,Li Chengsong,et al. Analy sis of vibratory mechanism movement for wine grape and design of virtual pro totype r esearch platform[J]. Journal of Agricultural Mechanization R esearch,2015,37(8):53-56,61.(in Chinese with English abstract)
[20] Pezzi F,Caprara C. Mechanical grape harvesting:Investigation of the transmission of vibrations[J]. Biosystems Engineering,2009,103(3):281-286.
[21] Peter G eorge Ochse,Berri. Fru it p icking shak er rod:U.S,5765350[P]. 1998-07-16.
[22] Pellenc R,Gialis J M. Berry harvesting machine,especially grape harvesting machine,equipped with a shaking system and mechatronic shaking control for this system:U.S,8511051[P]. 2013-08-20.
[23] Posselius J H,Larson D W. Fruit harvester with system and method for detecting and redu cing for ces exerted against rigid standing objects:U.S,7748206[P]. 2010-07-06.
[24] Caprara C,Pezzi F. Measuring the stresses transmitted during mechanical gra pe h arvesting[J]. Bios ystems Engineering,2011(3):97-105.
[25] 李成松,高振江,坎杂,等.双支撑酿酒葡萄果实振动分离装置作业机理[J].农业工程学报,2015,31(4):26-32.Li Chengsong,Gao Zhenjiang,Kan Za,et al. Operation mechanism of double support vibration separation device for wine grape berry[J]. Transactions of th e Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(4):26-32.(in Chinese with English abstract)
[26] 李成松,高振江,坎杂,等.酿酒葡萄果-蒂振动分离试验[J].农业工程学报,2015,31(9):39-44.Li Chengsong,Gao Zhenjiang,Kan Za,et al. Experiment of fruit-pedicle vibration separation of wine grape[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(9):39-44.(in Chinese with English abstract)
[27] 农业机械试验条件测定方法的一般规定:GB/T5262-2008 [S].北京:中国标准出版社,2009.
[28] 葡萄栽培和葡萄酒酿制设备葡萄收获机试验方法:GBT25393-2010[S].北京:中国标准出版社,2011.
[29] 中国农机网.葡萄收获机6分钟一亩地[EB/OL].(2013-07-09) [2016-11-16]. http://www.nongjx.com/news/detail/26070.html.
[30] 新疆昌吉市农机局.新疆昌吉组织观摩葡萄收获机现场作业[EB/OL].(2013-09-16)[2016-11-16].http://www.nongjx.c om/news/detail/26070.html.
[31] 李成松.酿酒葡萄振动分离机理及装置的研究[D].北京:中国农业大学,2015.Li Ch engsong. Study on Vibr ation Sep eration Mech anism and Equipment of Wine Grape[D]. Beijing:China Agricultural University,2015.(in Chinese with English abstract)
Development and test of 4PZ-1 self-propelled wine grape harvester
Yang Lantao1,Wang Lihong1※,Kan Za1,Li Chengsong1,Yuan Panpan2,Wang Zhe1
(1. College of Mechanical and Electrical Engineering,Shihezi University,Shihezi 832003,China;2. College of Mechanical Engineering and Traffic,Xinjiang Agricultural University,Urumqi 830052,China)
A t prese nt,t he w ine gra pe harvest in X injiang t otally de pends on la bor,w hich serio usly res tricts th e development of the wine grape industry,and therefore,its harvesting mechanization has become an inexorable tendency. In addition,the wine grapevines in Xinjiang need to be buried to resist the cold in winter,its tree style is multiple-trunk fan-shaped while the style of foreign wine grape tree is trunk-shaped primarily,and there are large differences in fruit distribution and vibration transmission attenuation between them. Thus,the foreign wine grape harvesting machine can’t be directly applied to the harvest of wine grape in Xinjiang. To solve these problems,a self-propelled grape harvester was designed and manufactured. The harvester operates with one line at a time,and ca n complete many jobs such as separation,conveying,cleaning and collection of wine grape at one time. It is mainly composed of shaking separation mechanism,collecting and conveying mechanism and self-propelled hydraulic chassis,and all parts of the harvester are powered hydraulically. In order to get better harvesting effect,the way driving the end of the rib com ponents in the shaking separation mechanism is used to achieve one kind of shaking effect with large am plitude and little disorder,which can overcome the is sue that wine grapevines in Xinjiang have the fast vibration energy attenuation and low transfer effic iency. C ombining the ki nematic an d dynamic analysi s for the shaking se paration m echanism’s key components and preliminary experimental study of the shaking separation test apparatus on the wine grape harvesting,the optimal workin g c ombination p arameters of th e sha king se paration were determined. When the c ollecting a nd conveying mechanism works,2 rows of symmetrical guide-supported double hinge chains are driven to do rotary motion and take both sides of the hoppers to collect and convey the grape fruits to the bins. The hoppers on the double hinge chains are made of flexible material and tightly meshed with each other in order to avoid damage to the vines and fruit leakage respectively. The main structural parameters of t he collecting and conveying mechanism were dete rmined as follows:the l ength and width of t he hopper bottom area were 1 200 and 800 mm respectively,and e ach receiving hopper’s volume was 0.08 m3. The main function of the self-propelled hydraulic chassis is providing power for th e harvester and adjusting the harvester’s operating parameters. The driving four wheels and steering front-wheel are used in the self-propelled hydraulic chassis,and its four wheels utilize the folding lift mechanism;in this way,the harvester’s flexibility and adaptability in the field are improved. Finally,the harvester’s field performance was teste d. The test results showed that when t he terrain was flat and the grape sugar content reached 18%,the harvester achieved the best harvesting effect at the 2 km/h working speed. At this speed,the averag e productivity was 0.6 hm2/h,the fruit average recovery rate reached 93.8% and the fruit average broken rate was l ess than 9.3%. The average productivity and fruit average recovery rate of this harvester have approached the level of foreign wine grape harvester basically,but the fruit average broken rate is relatively high. This is because the fruit distribution of Xinjiang wine grape is scattered,which increases the odds that the vibration ribs touch the grapes. However,the harvester gives the relatively poor harvest stability and reliability,and displays the high impurity rate;and this test also finds that some viticulture agronomy is not conducive to the mechanized harvesting for wine grape. The later work is mainly to improve and optimize the whole harvester structure to enha nce the harvester’s performance and harvest quality. This research provides a r eference for promoting the localization process of wine grape harvest machine in China.
agricultural machinery;design;crops;harvester;shaking separation;wine grape;construction
10.11975/j.issn.1002-6819.2017.01.005
S225.99
A
1002-6819(2017)-01-0038-07
杨兰涛,王丽红,坎 杂,李成松,袁盼盼,王 哲. 4PZ-1型自走式酿酒葡萄收获机的研制与试验[J]. 农业工程学报,2017,33(1):38-44.
10.11975/j.issn.1002-6819.2017.01.005 http://www.tcsae.org
Yang Lantao,Wang Lihong,Kan Za,Li Chengsong,Yuan Panpan,Wang Zhe. Development and test of 4PZ-1 self-propelled wine grape harvester[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(1):38-44.(in Chinese with English abstract)doi:10.11975/j.issn.1002-6819.2017.01.005 http://www.tcsae.org
2016-09-19
2016-11-22
国家自然科学基金资助项目(51465051);新疆生产建设兵团工业科技攻关计划项目(2013BA009)
杨兰涛,男,甘肃武威人,研究方向为现代机械设计研究。石河子石河子大学机械电气工程学院,832003。Email:ylt_shz@163.com
※通信作者:王丽红,女,河北邯郸人,教授,主要研究方向为农业机械装备工程。石河子石河子大学机械电气工程学院,832003。Email:wlh_shz@163.com
