基于双目视觉测距技术的导弹筒箱精确对接方法
2017-01-16唐伟峰
刘 涛,唐伟峰
(海军航空工程学院 飞行器工程系,烟台 264001)
基于双目视觉测距技术的导弹筒箱精确对接方法
刘 涛,唐伟峰
(海军航空工程学院 飞行器工程系,烟台 264001)
当前导弹筒箱对接工作中普遍采用人工操作方法,通过目视指挥操作实现卡口对接,精确性差,步骤繁琐,效率低下;针对此问题,基于双目视觉测量技术提出了一种自动对接方法,利用双摄像头测量对接卡口的成像偏差,计算筒弹调整的距离和角度,实现筒弹支脚和对接卡口的准确对准;然后研究了系统测量误差,利用非线性回归拟合方法分析了误差计算公式,利用等距标尺设计了测量误差标定实验方案,并针对摄像头安装不便的问题,给出了中点延长安装方法和计算补偿方法,最后设计了筒弹自动化对接系统的基本结构;试验结果表明,该方法能够有效获取筒弹对接偏差距离和角度,为位置调整系统提供有效输入,从而实现导弹筒箱的自动对接。
筒箱对接;双目视觉;误差分析;标定
0 引言
导弹装填工作是导弹武器系统技术准备的主要工作之一,装填速度直接决定着导弹武器系统的保障效率和战斗力再生成。导弹筒箱支脚对接到装填设备或发射装置上是导弹装填工作的重要组成部分。现在的对接工作一般由操作员操作起重装备起吊导弹筒箱进行对接,操作员难以看到对接过程,仅依靠指挥员口令及手势指挥操作员完成,精确度差、效率低下,特别是向舰艇装载导弹筒箱,由于缺乏精确对接技术和设备,往往需要舰面中转,过程非常繁琐,严重影响装备保障成效和战斗力的快速生成。本文利用双目视觉测量技术,提出一种精确的筒弹装填技术方法,能够快速准确完成装填工作。
1 问题阐述
导弹装填工作中对接部分的本质就是将筒弹支脚装入相关设备接口上并固定,如发射装置卡口、舰载筒弹入库装填车卡口等。图1为导弹筒箱对接俯视示意图,A1、B1、C1、D1为筒箱的4个支脚,A2、B2、C2、D2为对接设备的4个卡口,对接工作就是将矩形A1B1C1D1通过转动、移动和下移,实现与A1B1C1D1的重合。将A1B1C1D1与A2B2C2D2投影到同一水平面内,得到对接工作流程为:首先将筒弹转动角度∠D1FD2(设为θ),然后再测量EA1(设为S1)和EA2距离(设为S2),并在水平面内水平移动S1和S2,最后筒箱垂直下放,即可完成导弹筒箱支脚的对接工作。因此,θ角和水平距离S1、S2的精确测量是精确对接装填工作的关键。
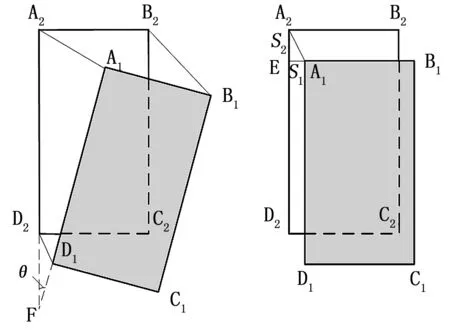
图1 筒弹对接工作示意图
2 双目视觉测量技术
双目视觉测量技术利用两台不同位置的摄像机拍摄同一幅场景,获取立体图像,针对其中的匹配点进行分析从而获取空间点坐标和相对位置关系。如图2,O1、O2为两台摄像机光心位置,且其角距和内部参数都相等,光轴互相平行,P1、P2分别是空间点P在两台摄像机上的成像点,在得到P1、P2对应坐标和两摄像机参数矩阵的条件下,即可通过建立以该点坐标为未知数的多个线性方程,利用最小二乘法求解得该点的坐标及其与两台摄像机中心点A之间的位置关系。P点的坐标为:
(1)
其中:ax、ay为左右摄像机的内参数,D为左右摄像机的光心距离,ul、vl为P点在左摄像机中的成像点的图像坐标,ur、vr为P点在右摄像机中的成像点的图像坐标,uo、vo为图像坐标系原点位置。式中ax、ay、D由摄像机标定工作得到,ul、vl、ur、vr由摄像机所得图像识别程序计算得到[1-3]。
利用摄像机标定工作同时可以得到左右摄像机与基准坐标系的位置关系,从而得到左右摄像机中心点A 与P点的位置关系。
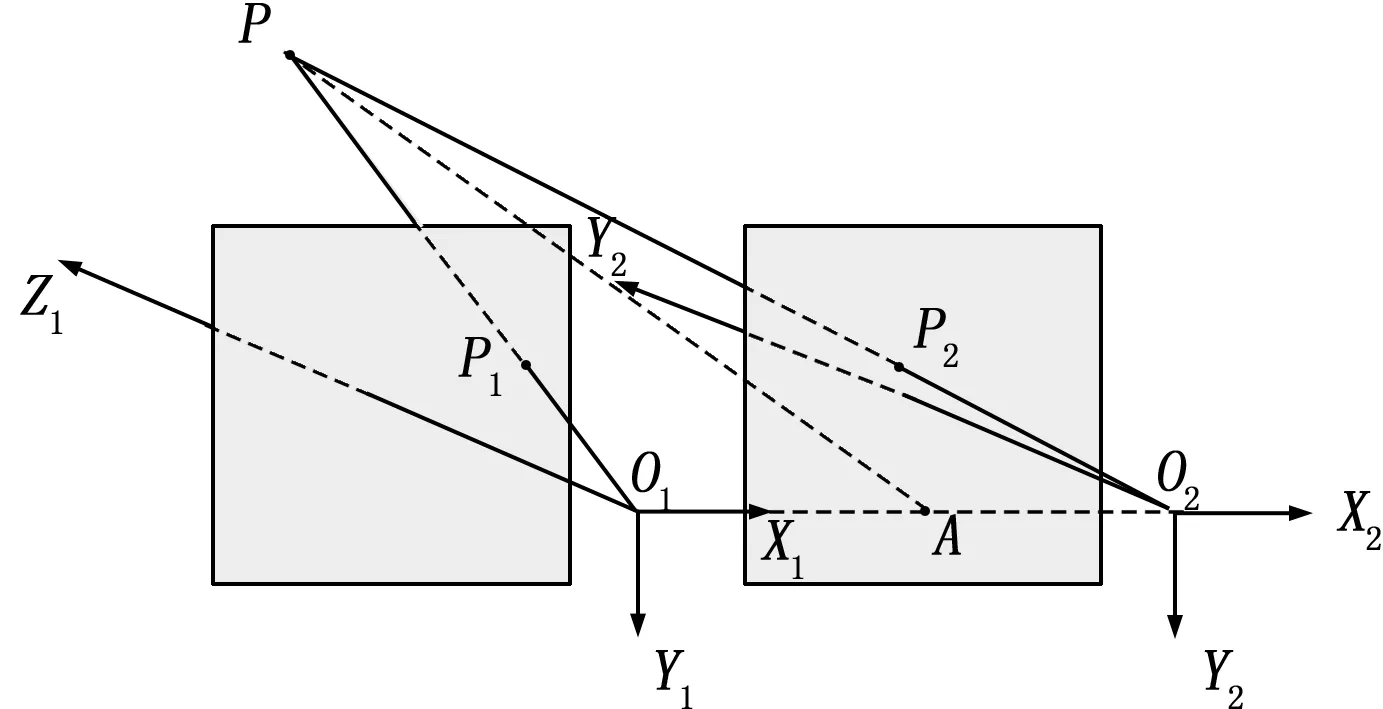
图2 双目视觉测量技术示意图
3 筒弹对接双目测量技术方法
由于筒弹对接需要获取的是投影平面中的夹角θ和水平距离S1、S2,因此,本文采用双目视觉测距中的平视立体视觉方法。在筒箱左侧两个支脚位置各设置两台摄像机,如图3。以左上角A1点的图像采集测量为例,如图4,A1点两侧设置焦距为f的摄像机,两者距离为d,A2成像点与图像中心距离分别为x1和x2,a为A2在成像面上的投影与A1之间的水平距离,b为A2与成像面之间的距离。因此可以得到:
(2)
因此由上式可以解算出和b的数值,设为aA和bA:
(3)
同样可得左下角D1点的相应参数为aD和bD,如图5(a)。设左侧两支脚距离为l,由相似三角形定理可得:
(4)
因此:
(5)
从而得到
(6)

图3 筒弹对接双目测量示意图

图4 A1点处双目测量计算示意图
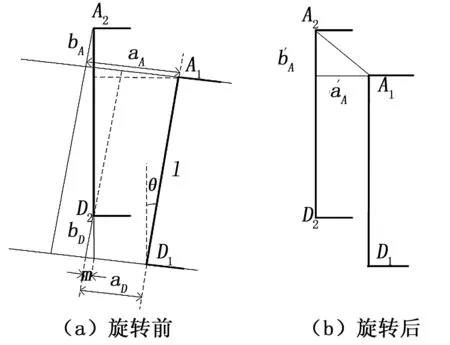
图5 筒弹左侧支脚计算示意图

4 成像误差及其补偿
4.1 误差分析
筒弹精确对接的关键是获取卡口成像点与图像中心距离x1和x2,而实际测量中,由于多种误差因素的存在,x1和x2的测量值存在着测量误差,这些误差因素包括:摄像机内参数标定误差、装配误差、坐标系标定误差等[4-5]。而本方案采用平视立体视觉方法,主要考察OX方向的距离测量误差,如图6。
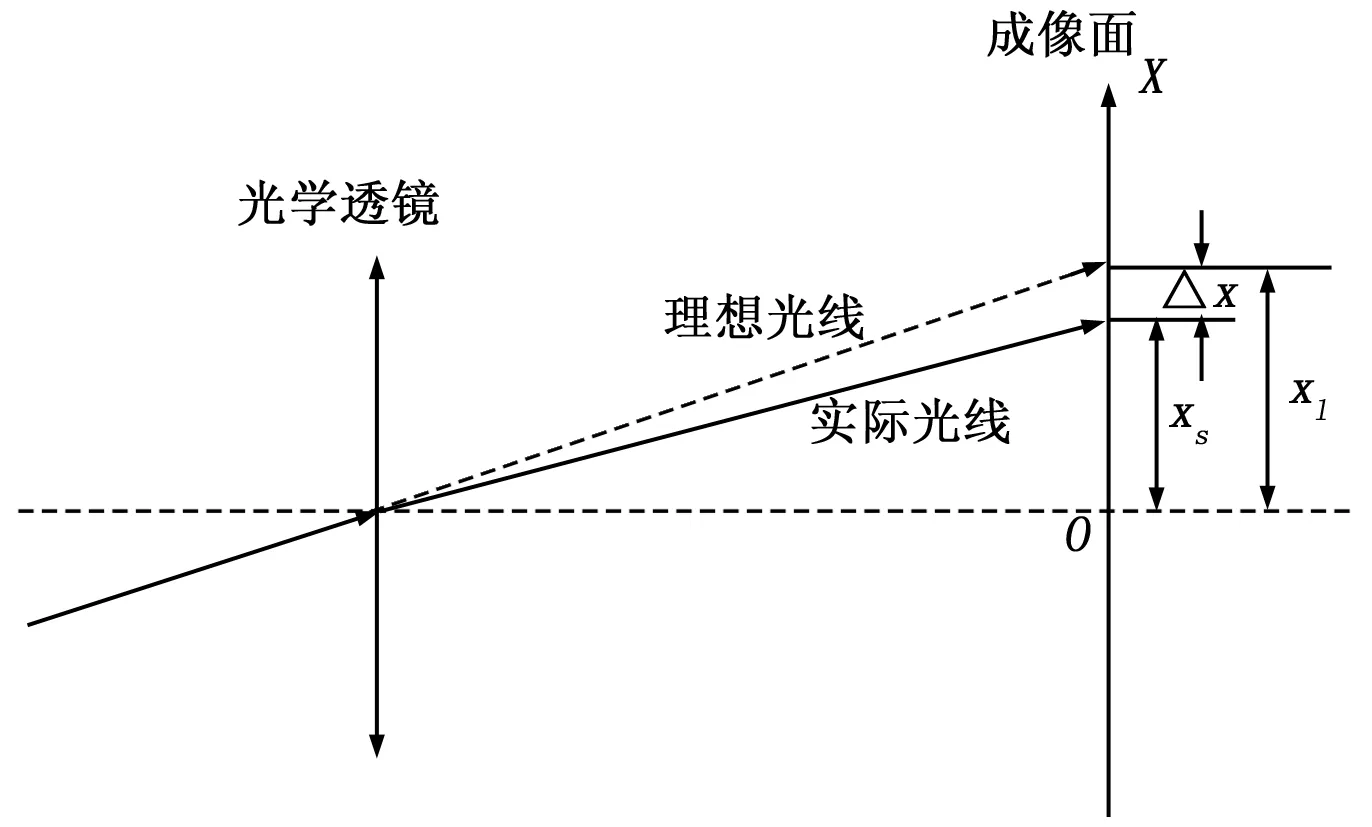
图6 成像误差示意图
设目标点理想的成像点与图像中心点的距离为xl,而由于光学畸变等因素造成的实际成像点距离为xs,测量误差为Δx,则:
Δx=xl-xs
(7)
考虑影响Δx的因素较多,相互关系十分复杂,且工作时只能得到xs的数值,因此可利用多次实验数据,采用一元非线性回归拟合方法确定Δx与xs之间的关系,从而对测量距离x1和x2进行补偿。
(8)
其中:n=1,2,3,…,a0,a1,…,an为相关项系数。在相同样本数的情况下,n的数值越大,拟合精度却不一定越高,因此n可在2~6之间进行不同的取值,对比求解得到最精确的拟合多项式,具体方法与说明参见[6]。
4.2 实验方案设计
在进行标定实验时,可制作含若干个等间距标点的标尺(设有2j个标点),将其中心零位Ob放置在摄像机轴线上,刻度与轴线垂直,距离透镜光心2f距离处,如图7。
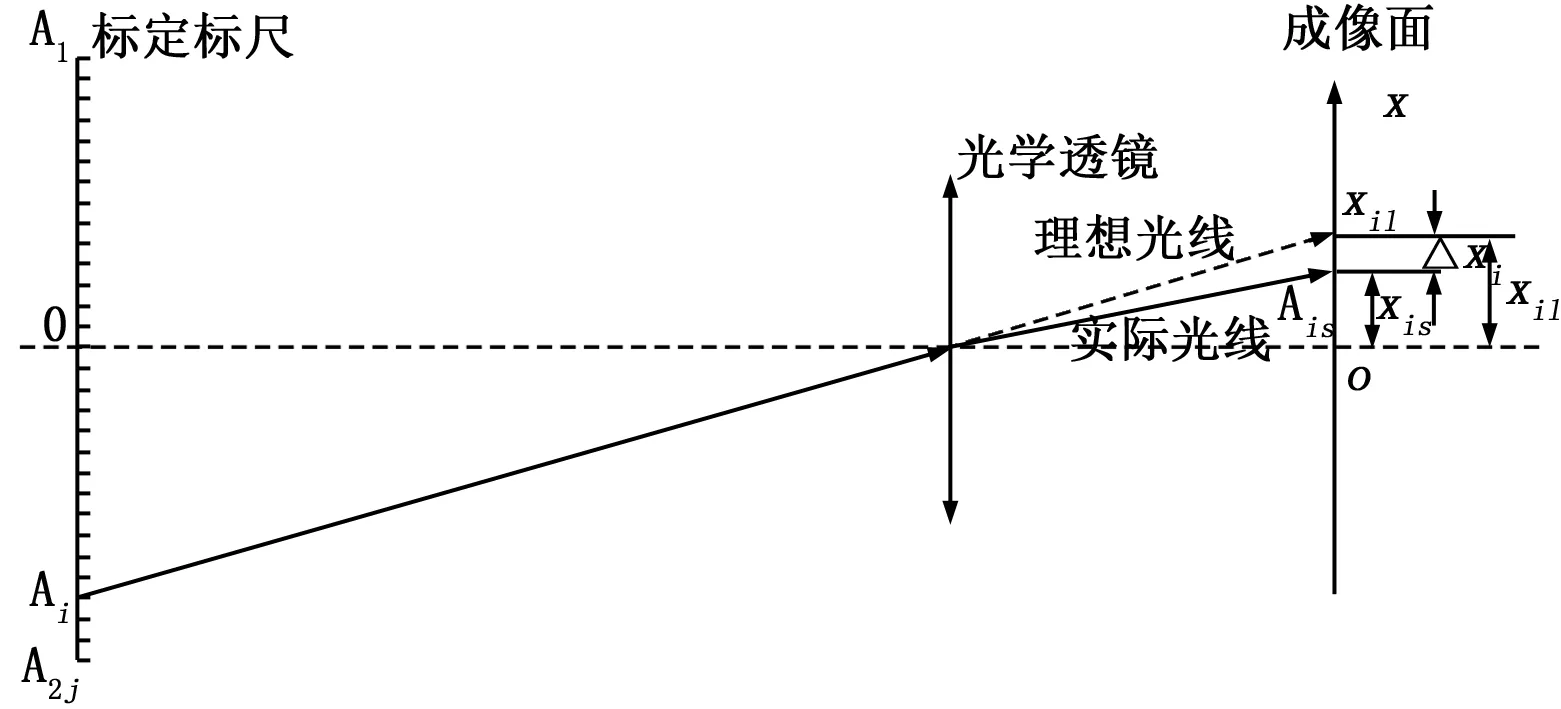
图7 标定实验示意图
标尺中标点Ai与标尺中点Ob的距离xi已知,Ai的理想成像点Ail与成像中心O的距离为xil,则
xil=xi/2
(9)
而Ai的实际成像点Ais与成像中心O的距离xis可测,因此得到:
Δxi=xil-xis=xi/2-xis
(10)
从而得到2j组Δx与xs的样本,进行关系拟合,得到拟合多项式:
Δx=g(xs)
(11)
4.3 误差补偿
由上述实验方案可得到图3中的各个摄像机成像点实际测量距离xs与测量误差Δx的关系g,因此可得到补偿后的测量距离为:
xb=xs+Δx=xs+g(xs)
(12)
将xb带入到公式(3)~(6)进行θ的解算,以及后续S1和S2的解算。
5 安装方案与算法补偿
如果在导弹筒箱支脚处设置摄像机将不便于支脚对接工作,可采用延长设置法,即在左右支脚延长线上距离为e处设置该摄像机,如图8,由于平行线原理,θ角的计算公式(6)不变,而在导弹筒箱姿态调整后左右位置平移时加以补偿e即可,即:
(13)

图8 摄像机平移安装
6 试验结果与分析
试验中在水平地面上设置两个模拟对接卡口,卡口上方分别设置一组双摄像头,用于测量和计算卡口连线与两组摄像头中点连线之间的距离和角度偏差。试验数据相关对比如表1。

表1 试验数据对比
通过试验结果可以得到,本方法能够有效获取双摄像头的中点(筒弹支脚)和对接卡口之间的空间位置偏差,从而为自动装填调整系统提供有效输入,实现准确自动对接。然而,数据的误差还比较大,虽然筒弹支脚与卡口之间留有一定的对接冗余度,但较大偏差仍然可能导致对接失败。误差根源主要为摄像头的测量偏差,应通过实验室标定方法提高摄像头的测量精度。
7 筒弹自动化对接系统
设计如图9所示的筒弹自动化对接系统,左右摄像机获取接口的成像数据,通过图像采集卡和计算机系统快速确定导弹筒箱支脚与对接卡口的位置关系,得到导弹筒箱调整的姿态和位置数据,传输到指示系统或自动执行机构。当人工操作设备进行导弹筒箱对接装填时,将该调整数据显示在操作界面上,可实现人工对接的精确化操作;当采用自动化对接装填装置时,可将该调整数据作为自动化执行设备的输入,从而实现自动精确对接装填。该技术方法能够有效提高导弹筒箱支脚对接装填的工作效率和准确性,提升导弹装备技术保障水平。另外由于对接工作采用了摄像机,能够实现了整个对接过程的可视化,提升了态势感知能力,确保了对接工作的安全性。
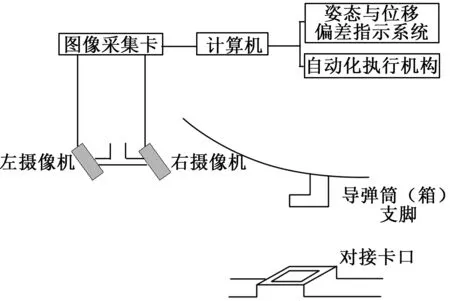
图9 自动化对接系统
[1] 闫 龙,赵正旭,周以齐.基于CCD的立体视觉测量系统精度分析与结构设计研究[J].仪器仪表报,2008, 29(2):410-413.
[2]朱效明,高稚允.双CCD立体视觉系统的理论研究[J].光学技术,2003,29(3):298-300.
[3]王建华,韩红艳,王春平.CCD双目立体视觉测量系统的理论研究[J]电光与控制,2007,14(4):94-96.
[4]张 刘,支 帅.双目测量系统目标相对位置误差分析[J].红外与激光工程,2014,43(12):116-122.
[5]余惠杰,韩平畴.双目视觉系统的测量误差分析[J].光学技术,2007,33(11):157-159.
[6]角仕云,刘丽娅.实用科学与工程计算方法[M].北京:科学技术出版社,2000.
A Precise Merging Method of Missile Tube Based on Binocular Vision
Liu Tao, Tang Weifeng
(Department of Airborne Vehicle Engineering, Naval Aeronautical and Astronautical University, Yantai 264001, China)
To solve the problems of multi steps and low efficiency caused by low precision of manual operation in missile tube merging work, an automatic method was studied based on binocular vision measuring technology. Calculating formulas of parameters to be adjusted in every step were deduced by use of measuring the image deviation between two installed cameras, including the distance and angle for making support legs of tube matching the bayonet of filling equipments. Then the measuring error was researched and the way to get its calculating formula was given out by non-linear regression fitted method, followed was the calibration experiment to get the samples. Also, for convenient installation, translation scheme and its compensation method were analyzed. At last, the basic structure of an automatic merging system was designed. The experiment result showed that the method could get the merging deviation effectively for adjusting system, to make automatic merging work come true.
merging work of missile tube; binocular vision; error analysis; camera calibration
2016-05-03;
2016-05-24。
学院青年科研基金资助项目(HYQN2015-16)
刘 涛(1982-),男,江苏灌云人,博士,讲师,主要从事兵器发射技术、导航技术方向的研究。
1671-4598(2016)10-0113-03
10.16526/j.cnki.11-4762/tp.2016.12.032
TP391.41
A
