自抑制神经元控制系统的参数设计方法及特性分析
2017-01-16姜心淮张双彪
姜心淮, 张双彪,2
(1.北京理工大学 宇航学院, 北京 100081; 2.北京信息科技大学 信息与通信工程学院, 北京 100101)
自抑制神经元控制系统的参数设计方法及特性分析
姜心淮1, 张双彪1,2
(1.北京理工大学 宇航学院, 北京 100081; 2.北京信息科技大学 信息与通信工程学院, 北京 100101)
在分析神经元控制模型的基础上,从控制理论角度,构建了自抑制神经元控制系统的方框图,推导了系统参数(T、τ、b、k)的设计条件,给出了参数设计曲线及取值表,推导了控制系统的单位响应函数、峰值时间tp、峰值和稳态值Mp;通过软件进行了仿真验证,并分析了各参数对系统性能的影响,结果发现,tp与τ呈现近似正相关的线性关系,与kb呈现出负相关的关系,Mp与T、kb呈现近似正相关的线性变化关系;完善了神经元模型设计理论和方法,对神经元控制系统设计具有指导意义。
神经元; CPG; 参数设计; 瞬态响应; 机器人控制
0 引言
随着人工智能化的持续发展,机器人以其高灵活性、高适应能力以及高仿真性的优点,逐渐走入在人类社会的大舞台,并在工作、生活、娱乐等多方面展露出新兴的发展前景,成为智能控制领域里炙手可热的研究对象。在机器人研究领域里,运动控制始终成为一个关键问题,也是一个核心问题。为解决机器人控制的准确性,提高机器人运动的高仿生效果,机器人研究者们不但提出了基于运动学和动力学模型的控制方法,而且结合神经控制方法,设计了中枢模式发生器(简称CPG),避免了运动学、动力学模型的复杂性问题,为实现步态控制开辟了新路径。
神经元理论是CPG控制器的设计基础,通过振荡器产生运动控制信号。目前,最为广泛的神经元模型是1984年由Mastuoka提出的具有适应性的抑制型神经元模型(也称M-模型),该模型更符合神经生理学思想,较完善地体现了动物的神经控制方法,随后,国内外机器人研究者们大都在此基础上进行控制方法的研究[1]。Taga等采用耦合神经元振荡器和肌肉骨架动力学系统,来实现具有适应未知环境特点的双足机器人运动控制问题[2-3]。Kimura利用M-模型设计CPG模型,并和弹簧-质量系统进行匹配设计,实现四足机器人在不规则环境的跳跃和平面环境下的跑动运动[4-5]。Inoue等针对蛇形机器人的蜿蜒运动,设计了M-模型的CPG控制器,并初步分析了CPG的参数对控制器的输出信号的影响[6]。卢振利等同样设计了适用于蛇形机器人的循环抑制M-CPG模型,通过对关节电机的控制,实现机器人的蜿蜒步态[7]。吴晓东等设计了反馈式的相互抑制CPG模型和循环抑制CPG,而且初步研究了模型参数对CPG输出及机器人运动曲线的影响[8-9]。
综上可见,目前的CPG理论在机器人运动控制研究方面取得了一定成果。然而,在基于Mastuoka模型的CPG控制器设计问题上,尤其是模型参数取值问题,后人均是通过不断试验或试取的手段,来确定满足条件的CPG参数,而均未进行系统地理论研究。为此,本文从控制理论角度出发,在搭建自抑制神经元控制系统的方块图基础上,研究神经元系统的参数设计方法,分析控制系统的性能。
1 自抑制神经元控制系统
根据神经生理学理论,神经元在不受到外界激励时,或者在外界激励小于其抗激励的阈值时,其对外界无电荷输出现象。当神经元由于所受外界激励而超过阈值,并引起电荷输出时,神经元会由于自身的输出产生抑制激励的效果[10]。根据神经元独特的运动机理,可设计出自抑制神经元控制系统,而且该控制系统在薄膜潜能的不断累积下,能够释放出高于薄膜潜能几倍的输出。
借鉴Mastuoka提出的神经元动力学模型,自抑制神经元控制器动力学模型为:

(1)
(2)
y=kg(x-θ)
(3)
(4)
其中:τ神经元薄膜潜能时间常量;T为神经元薄膜调整时间常数;u为外界输入激励,b为稳定状态激活率,c为外界输出激励的权重系数,x为神经元的薄膜潜能,x′神经元内部的调整信号,y神经元输出信号,k为神经元输出的调整系数,θ为神经元调节阈值。
根据式(1)~式(4),自抑制神经元控制系统主要由两个微分方程和一个分段函数组成,可画出神经元的方框图,如图1所示。从图中可以明显看出,自抑制神经元为输出反馈系统。神经元输出信号y始终为非负数,并且是k倍的神经元所积累的薄膜潜能信号,k决定着不同神经元所能够释放能量的大小。神经元对外界产生输出时,同时对自己产生抑制信号,直到神经元内部的薄膜潜能与外界的输入激励信号大小相等时,神经元将不会产生输出信号。

图1 自抑制神经元系统的方框图
根据上面分析,当x小于零时,系统闭合环路的前向通道为零,系统没有输出;当x大于零时,系统闭合环路的前向通道为k,可得到系统的传递函数:
(5)
通常情况下,系统参数T、τ、b、k为正数,所以系统为稳定的二阶系统。系统的固有频率ωn、阻尼系数ξ、系统比例系数K为:
(6)
(7)
(8)
由式(6)和式(7)可知,当薄膜调整时间常数T或薄膜潜能时间常量τ增大时,系统固有频率变小,阻尼系数变大;否则相反。由式(8)可知,系统比例系数与τ、调整系数k有关,当τ增大或k减小时,K变小,否则相反。
2 控制系统参数设计
与传统控制系统不同,神经元控制系统输出信号通常为非振荡的过程,因此该系统应属于过阻尼过程,即ξ>1,可由如下关系式表示[1]:
(T-τ)2≥4Tτkb
(9)
式(9)表示自抑制神经元控制系统中参数的满足条件,将其作如下整理:
(10)

图2 参数设计曲线
在图2中,实线为z1曲线,表示在τ取值不同时z1随T变化的过程;水平的断线为z2在kb取值不同时曲线。曲线交点为自抑制神经元控制器的参数设计的临界取值,在选定T,τ和kb中某一个参数时,可以结合图2所示,来确定其它参数的,需要注意的是,此时的取值为边界值。根据式(6)~式(8)可知,在参数取值处于边界时,k和b呈反比例关系。
另外,从图1中同样可以看到,为满足式(10)不等关系下,当T和τ取值均很小时,kb取值可以达到很大,因此可根据系统特性要求来具体确定。表1列出了T>1、τ>1时各参数的部分取值情况,在控制系统参数设计时可以参考。
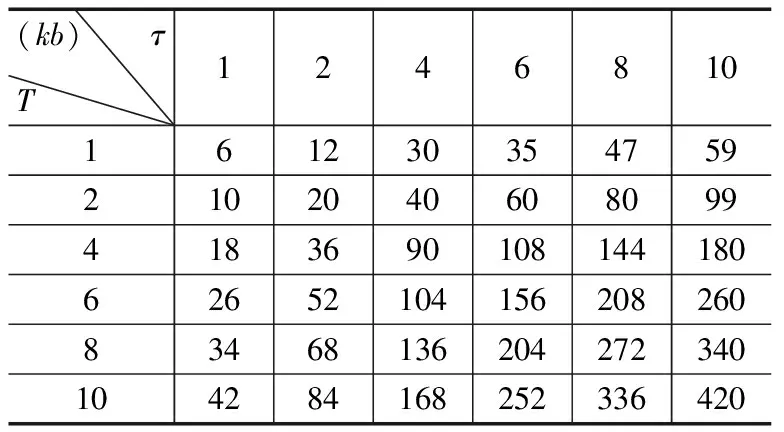
表1 参数取值表
3 控制系统性能
自抑制神经元控制系统主要侧重于瞬态过程峰值、峰值时间,和稳态过程的输出值。峰值和峰值时间体现控制系统的瞬态输出和响应速度,而稳态过程的输出值则与传统控制系统不同,体现了输出信号的跳跃程度。为此,本文针对满足设计要求的控制系统,研究当受到外界激励时,自抑制神经元控制系统的响应过程。
设在外界激励信号为典型的单位阶跃信号,通过对式(5)进行拉氏反变换,可得到神经元系统的单位阶跃响应函数:
y(t)=a1es1t+a2es2t+a3·1(t)
(11)
其中:
,

Δ=T2-2Tτ+τ2-4Tτkb
当神经元的输出信号属于连续过程,所以单位响应函数的导数存在:
y′(t)=a1s1es1t+a2s2es2t
(12)
当导数为零时,可以得到神经元输出的峰值时间:
(13)
由式(13)可知,当T或τ增大时,峰值时间tp增大;反之,则tp变小。
将tp代入式(11)中,可以得到神经元输出信号的峰值:
Mp=a1es1tp+a2es2tp+a3·1(tp)
(14)
峰值主要取决于a1、a2和a3,可根据系统要求进行选取。
根据式(11)可得系统的稳态输出:
(15)
由式(15)可知,当b增大时,稳态输出越小,否则相反;当k减小时,稳态输出增大。可见,在满足系统具有过阻尼特性要求下,系统在对阶跃信号响应后,输出信号具有跳跃特点。
4 仿真与分析
为进一步研究T、τ、kb对系统响应的影响,采用单变量方式进行仿真,历时t=100 s,仿真条件为:(1)T=10+10t,τ=1,k=1,b=2,c=1;(2)T=90,τ=1+0.04t,k=1,b=2,c=1;(3)T=90,τ=1,k=1,b=1+0.01t,c=1。分别在条件(1)、(2)和(3)下研究T、τ、kb对系统性能的影响,仿真结果如图3~图5所示。

图3 T对tp、Mp的影响 图4 对tp和Mp的影响

图5 kb对tp和Mp的影响
综合图3~图4,可知tp和Mp随着T、τ的增大而增大,并且tp随τ呈近似线性关系,Mp随T呈现近似线性变化关系。在图5中,tp随着kb增大而减小,Mp随着kb的增大而增大,二者与kb呈现出近似线性变化的关系。
根据表1,参数选取如下:(1)T=36,τ=2,k=1,b=4,c=1;(2)T=60,τ=6,k=1,b=2,c=1。设外界激励为单位信号,分析自抑制神经元控制系统的响应曲线,总仿真时间t=200 s,具体过程如图6所示。
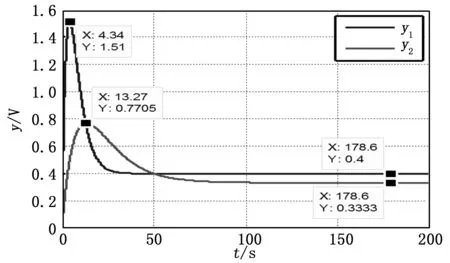
图6 自抑制神经元控制系统单位阶跃响应
由图6可知,在参数选择满足式(9)的设计要求下,系统输出具有明显的跳跃过程。两种参数条件下系统性能参数分别为tp1=4.34 s,tp2=13.27 s,Mp1=1.51 V,Mp2=0.77 V,y1(∞)=0.4 V,y2(∞)=0.33 V,与理论值相符。可见,与y2相比,y1具有较小的峰值时间和较大的峰值,具有更好的响应特性。
5 结论
本文首先在搭建自抑制神经元控制器的方框图基础上,推导了控制系统的参数满足条件,并给出了参数设计曲线图和参数取值表。并且,本文推导了自抑制神经元控制系统的单位阶跃响应函数,得到了系统输出的峰值时间、峰值和稳态值的计算公式,并在软件仿真基础上,得到如下结论:1)tp与τ呈现近似正相关的线性关系,与kb呈现出负相关的关系。 2)Mp与T、kb呈现近似正相关的线性变化关系。完善了神经元模型设计理论和方法,对控制系统设计具有指导意义。
[1] Matsuoka K. Sustained oscillations generated by mutually inhibiting neurons with adaptation[J]. Biological Cybernetics, 1985, 52:367-376.
[2] Taga G, Yamaguchi Y, Shimizu H. Self-organized Control of bipedal locomotion by neural oscillators in Unpredictable Environment[J]. Biological Cybernetics, 1991, 65:147-159.
[3] Taga G. A model of the Neuro-musculo-skeletal system for human locomotion[J]. Biological Cybernetics, 1995, 73:113-121.
[4] Kimura H, Sakurama K, Akiyama S. Dynamic walking and running of the quadruped using neural oscillation[A]. 1998 IEEE/RSJ International Conference on Intelligent Robots and Systems[C]. 1998, 1:50-57.
[5] Kimura H, Akiyama S, Sakurama K. Realization of dynamic walking and running of the quadruped using neural oscillator[J]. Autonomous Robots, 1999, 7(3):247-258.
[6] Inoue K, Ma S, Jin C H. Neural oscillator network-based controller for meandering locomotion of snake-like robotsd[A]. Proceedings of the 2004 IEEE International Conference on Robotics and Automation[C]. New Orleans, La, April, 2004:5064-5069.
[7] 卢振利, 马书根, 李 斌,等. 基于循环抑制CPG模型的蛇形机器人蜿蜒运动[J]. 自动化学报, 32(1), 2006: 132-139.
[8] 卢振利, 马书根, 李 斌, 等. 基于循环抑制CPG 模型控制的蛇形机器人三维运动[J].自动化学报, 33(1), 2007: 54-58.
[9] Wu X. Ma S. CPG-based control of serpentine locomotion of a snake-like robot[J]. Mechatronics, 2010(20): 326-334.
[10] 欧阳楷, 邹 睿, 刘卫芳.基于生物的神经网络的理论框架-神经元模型[J]. 北京生物医学工程, 1997, 16(2):93-101.
Parameter Design Method and Performance Analysis of Self-inhibition Neurons Control System
Jiang Xinhuai1, Zhang Shuangbiao1, 2
(1.School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China; 2.School of Information & Communication Engineering, Beijing Information Science and Technology University, Beijing 100101, China)
Based on analysis of neurons control systems, a block diagram of self-inhibition neurons control system is built with control theory. The design condition of parameters (T,τ,b,k) is deduced and sheet of low limit values is proposed. Unit response function, peak timetp, peakMpand steady-state output are provided, and their relationships with system parameters are analyzed. The simulation results show thattpis positively correlated withτ, but negatively correlated with (kb), andMpis positively correlated withTandkb. The results are helpful for neuron control system design.
neurons; CPG;parameter design; transient response; robot control
2016-07-04;
2016-07-29。
国家自然科学基金(61261160497;61471046)。
姜心淮(1991-),男,吉林人,大学,主要从事智能控制方向的研究。
1671-4598(2016)12-0075-03
10.16526/j.cnki.11-4762/tp.2016.12.021
TP242.6
A
