基于天花板的移动机器人视觉定位方法的研究
2017-01-12朱莹莹谢明王德明梅磊邓歆
朱莹莹+谢明+王德明+梅磊+邓歆
摘 要: 为了实现室内移动机器人的自定位,考虑到室内的复杂程度和环境特色,设计一种基于单目视觉的移动机器人定位系统。机器人在室内带有天花板路标信息的环境下,以颜色和形状结合的路标作为特征,通过机器人头顶与天花板垂直的摄像机,运用彩色图像分割轮廓矩匹配的方法识别路标,解析路标携带的世界坐标信息,从而计算出机器人的全局位置和航向角。该方法大大提高了图像处理和特征提取的速度,通过实验验证,其满足定位系统的实时性和鲁棒性要求。
关键词: 视觉定位; 天花板; 移动机器人; 路标; 彩色图像分割
中图分类号: TN911.73?34; TP391.41 文献标识码: A 文章编号: 1004?373X(2016)23?0129?04
Research on ceiling?based visual location method of mobile robot
ZHU Yingying, XIE Ming, WANG Deming, MEI Lei, DENG Xin
(College of Electrical Engineering and Control Science, Nanjing Tech University, Nanjing 211816, China)
Abstract: In order to realize the self?location of the indoor mobile robot, a mobile robot location system based on monocular vision was designed in consideration of the indoor complexity and environment feature. The landmark combining color and shape is taken as the robot feature in the indoor environment with the ceiling landmark information. The color image segmentation and contour matching method is used to recognize the landmark by means of the camera whose head is vertical to the cei?ling, so as to analyze the world coordinate information of the landmark, and calculate the global position and azimuth angle of the robot. This method can improve the speed of image processing and feature extraction greatly. The experimental results show this method can satisfy the requirements of system real?time performance and robustness.
Keywords: visual location; ceiling; mobile robot; landmark; color image segmentation
0 引 言
在移动机器人研究的领域中,自主定位和导航一直是研究的热点,其中定位一直是首要解决的问题,即确定移动机器人在全局环境中的位置和方向。目前对于不同的传感器提出了很多定位方法,主要分为相对定位法和绝对定位法。随着机器视觉的图像处理技术的不断提高,路标定位法的高速度、高精度的特点使其应用更加广泛。文献[1]提出了一种基于直线和单特征点的视觉推算定位方法,通过固定在移动机器人上的摄像机提取天花板图像中的两条相交直线及其交点,通过直线的方向估计机器人的方位,再根据相交点的像素坐标变化量推算出机器人的位置。文献[2]提出了一种在天花板上贴人工混合编码路标的方法,通过选取合适的动态阈值提取路标像上的编码信息和重心坐标,从而换算出机器人在环境中的位置和航向,实现定位。文献[3]提出一种可用于图书馆内图书运载车的车辆室内自动定位定向方法,借鉴二维条形码思想设计路标,将路标放置在图书馆天花板上,由安装于图书运载车上,且光轴和天花板垂直的摄像机进行识别定位。文献[4]利用彩色图像对移动机器人进行定位,将颜色转换到HSI空间中,在结构上采用全局静态视觉,给移动机器人设置着色标记,利用标记的颜色信息识别移动机器人从而确定其位置。
本文提出一种基于天花板路标的机器人视觉定位方法,设计出一种颜色和形状结合、具有高识别度的路标,移动机器人头顶安装摄像头,指向并垂直于天花板平面,机器人在行驶过程中采集天花板路标,通过图像预处理、颜色分割、特征提取等技术定位人工路标,解读路标中包含的世界坐标信息,计算机器人的当前位置和航向角。
1 系统描述
本系统的载体为人形移动机器人,如图1所示。在机器人头顶安装一部单目摄像机,摄像机实时采集天花板,图像处理模块将摄取的图像进行处理、识别、匹配进行定位。因此设计合理的路标是实现快速定位的关键。
1.1 路标设计
根据室内的环境,设计一种可以安置在天花板上的彩色路标,每个路标都具有惟一的颜色图形组合,同时每个路标携带坐标信息。
直接采用颜色和字母形状的组合,可以适当拉开色度的差距,从真彩色图像量化成8 b图像,即256色,再根据实际中的面积选择颜色和字母图形个数进行组合。例如在256色中选择20种颜色,图形选择10个字母作为模板,可以组合200种路标。并且通过字母的朝向获得航向角(其中摒弃上下对称的字母),直接计算出移动机器人的方向。
1.2 路标识别和信息提取
路标定位是具有明显区别于环境,能够被传感器通过相应算法识别的物体。通常情况下,路标所处的环境位置是不变的或者路标的位置是已知的,基于此,机器人可以在检测到预订路标的情况下对自身位置进行再次修正。对于机器人而言,定位的主要任务就是采用合适的算法对设置的路标进行识别,并且根据识别的结果计算路标所代表的环境信息,以此确定机器人的位置,实现机器人的定位。
2 视觉系统
本移动机器人可以采用在双轮差速移动平台上配有双机械臂的设计方案,使用红外和超声传感器相结合的方式作为机器人的避障传感器系统,并以全局视觉和双目立体视觉作为主要的机器人传感器系统,实现了餐厅服务机器人在餐厅环境下的移动导航、定位及避障功能,成功完成服务机器人的自主取菜、送菜及点菜等任务。
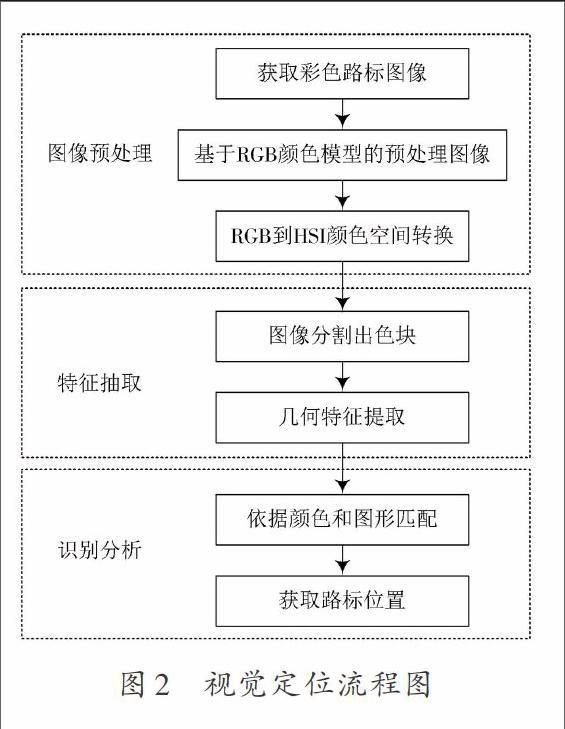
实验系统的处理流程如图2所示,通过对彩色图像的阈值分割获得颜色信息,再进行特征提取获得路标中包含的坐标信息,从而实现定位。
2.1 色彩空间转换
RGB颜色空间常用于显示系统,但不适合于图像分割和分析。HSI颜色空间是一种和人眼的视觉感知相吻合的色彩空间,它的三个颜色分量相对独立。由于人的视觉对亮度的敏感程度远强于对颜色浓淡的敏感程度,人的视觉系统经常采用HSI色彩空间, 它比RGB色彩空间更符合人的视觉特性。在图像处理和计算机视觉中,大量算法都可在HSI色彩空间中方便地使用,它们可以分开处理而且是相互独立的。因此,在HSI色彩空间可以大大简化图像分析和处理的工作量。所以,为了提高识别效果,获得具有适应性调节的颜色特征。所以先将RGB颜色空间转化到HSI颜色空间,再进行彩色图像分割。由RGB空间到HSI空间的变换为:
[H=θ,2π-θ,B≤GB>GS=1-3R+G+BminR,G,BI=13R+G+B] (1)
式中:[θ=cos-112R-G+R-BR-G2+R-BG-B]。如果饱和度[S]为0,色调[H]就没有定义,如果强度[I]为0,饱和度[S]就没有定义。
2.2 基于彩色空间的颜色分割
HSI模型用[H,S,I]三参数描述颜色特性。其中[H]表示色调,定义颜色的波长;[S]表示饱和度,形容颜色的深浅程度;[I]表示强度或亮度。色调[H]主要由可见光光谱中各分量成分的波长来确定,为光谱波长分布中波峰的位置,是颜色光的基本特征。如果以颜色作为主要分割依据,那么色调[H]具有单调惟一的特性。色调值[H]由角度表示,从0°~360°的变化范围正好对应可见光从红到紫的所有颜色。为此,可采用基于色调[H]直方图统计的自适应阈值化法对图像进行分割。
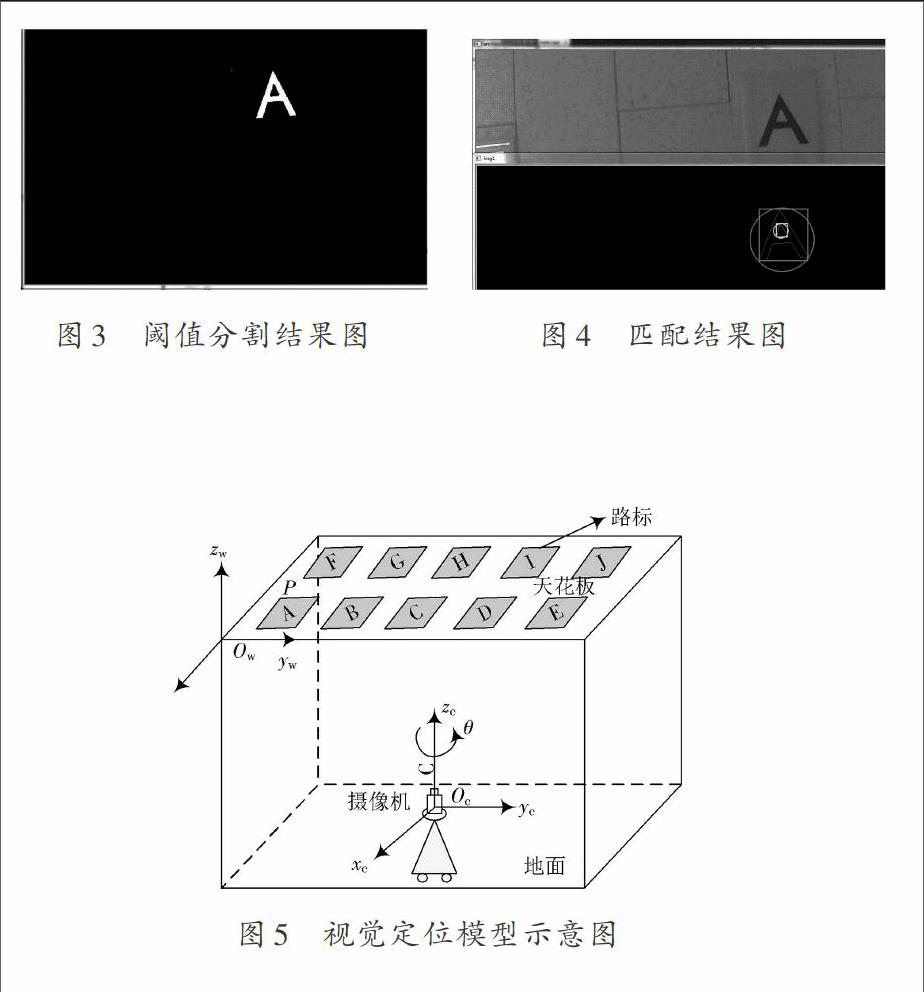
对彩色图像的分割现已提出了许多算法, 这些算法可分为四大类:基于邻域的方法,直方图阈值法,色彩空间聚类的方法和基于模糊集理论的方法。其中,基于阈值分割的方法最早被使用,运算简便且速度快。直方图阈值法广泛应用于单色图像的分割,当目标或背景内相邻像素的灰度值高度相关而处于目标和背景交界处两边的像素的灰度值差别很大时,选择合适的阈值进行分割效果最好。阈值为82时效果最好,分割结果如图3所示。
2.3 字母图形提取、识别
颜色分割后,视觉系统获得路标的颜色信息,继而进行对图案的提取识别。几何特征提取的方法有很多,基本上都是根据提取的图像边缘的特征进行检测。常用的有两种:整体和局部方法。本系统采用整体方法中的不变矩特征提取Hu矩匹配路标字母形状。OpenCV库函数cvMatchShape()计算两个物体的矩再根据提供的标准进行比较。图4为天花板上的实际路标图像与路标模板匹配的结果。匹配结果返回为0,表示匹配正确,解析出路标[A]的实际坐标为(100,100)。
3 定位系统
机器人顶部的摄像机在运动过程中相对于天花板平面的特征图像块没有尺度变化发生,仅有旋转和仿射变换,因此可以有效地缩短特征提取、匹配的时间,减小计算复杂度,同时具有很高的定位精度。
3.1 视觉模型
基于天花板的视觉定位模型示意图如图5所示。摄像机安装在餐服机器人的头顶,并垂直指向天花板。假定地面与天花板均为平面,且两个平面互相平行。将世界坐标系建立在天花板上。
摄像机采用小孔模型,自然光经物体反射到达摄像机的感光元件形成物体的图像。摄像机坐标系原点建立在光轴中心处,其[z]轴与摄像机光轴中心线方向平行,摄像机到天花板方向为正方向,图像坐标沿水平增加的方向为[x]轴正方向。假设摄像机的内参数已经预先标定,内参数模型为:
[uv1=kx0u00kyv0001xczcyczc1] (2)
3.2 视觉推算定位
在机器人首次标定之后,摄像机的投影矩阵不再变化,旋转矩阵不再变化,在以后的定位中只要知道一个世界坐标就可以确定机器人的位置。
设路标像中字母朝向为正方向。图像中心、路标像中心与世界坐标的关系如图6所示。图中[P]点表示图像中某路标的中心;[Q]点表示图像的中心;[xwOyw]坐标系代表环境坐标系。[xPy]坐标系代表路标坐标系。[PQ]表示向量[PQ]的模,即[P]点与[Q]点之间的距离;[α]表示机器人行驶的航向角;[β]为路标像中心到图像中心的连线与世界坐标系[xw]轴的夹角;[θ]为[x]与[xw]的夹角。
图6 图像中心、路标像中心与世界坐标的关系图
根据图6所示的几何关系,可以获得路标坐标系[xPy]中[Q]点坐标(单位:像素)的计算公式为:
[xB=PQcosθ=PQcos(β-α)yB=PQsinθ=PQsin(β-α)] (3)
若路标的全局坐标为[(x1,y1)],则移动机器人的全局坐标[(xR,yR)]为:
[xR=x1+SxQ=x1+SPQcos(β-α)yR=y1+SyQ=y1+SPQsin(β-α)] (4)
4 实验结果分析
本文的载体是人形移动机器人。该移动机器人最大移动速度为0.7 m/s,身高140 cm。行走动力源采用铅酸电池,其他动力源可以采用锂电池,充电一次可以连续工作4 h。机器人所用摄像头为USB3.0摄像头,焦距为3.6 mm,500万像素。实验中以Win7 64位系统为开发平台,VS2010和OpenCV2.4.9为软件编程环境。实验在室内实验室环境下进行。
天花板到移动机器人头顶摄像头的距离是218 cm,天花板上各路标间距20 cm。比例系数[S]由天花板路标实际长度与摄像机图像平面上的同一位置长度比值决定,经实际测量[S=2.66。]
机器人实验移动轨迹如图7所示。“*”代表实验过程中机器人的测试位置,“o”代表世界坐标系中的路标实际位置。实验中,移动机器人从起始坐标点(100,100)沿顺时针方向运动一圈回到起始点附近。移动过程中,利用本文方法进行在线实时定位,采集处理了天花板上的20个路标点,其中最大误差为33 cm,最小误差为2 cm。从图7可以看出,测量位置和实际位置基本一致。采样点的误差曲线如图8所示,横轴是采样点,纵轴是测量位置和实际位置的欧氏距离。
移动机器人在行驶过程中,根据路标字母的朝向获得航向角,进行几组单独的航向角实验来验证航向角精度。令机器人沿一条直线行驶,即航向角[α]不变时,观察比较系统计算获得的航向角。结果数据如表1所示。
通过多次实验测量结果统计发现,移动机器人航向角的测量误差不超过3°,移动机器人的位置误差不超过2%。对于餐厅环境来说,这些误差在允许范围内。
5 结 语
机器人工作在特定的环境中,主要完成迎宾、导购、对话等任务。这对机器人位置的精确度和运动的实时性要求很高。本文针对移动机器人的自动定位导航应用,提出了一种基于彩色路标的室内定位方法。虽然此方法需要在室内天花板按照一定规则粘贴各种图案的路标,但是可以根据环境风格进行优化,而且路标制作简单、价格低廉、适用性强。并且通过实验说明该路标方法具有简单、鲁棒性高、实时性好的特点,为接下来的路径规划和自主导航打下了坚实的基础,具有很好的应用前景。
参考文献
[1] 韩立伟,徐德.基于直线和单特征点的移动机器人视觉推算定位法[J].机器人,2008,30(1):79?84.
[2] 章小兵,宋爱国,唐鸿儒.基于视觉的室内移动机器人精确定位方法[J].数据采集与处理,2007,22(2):196?200.
[3] 王建功,林国余.室内图书运载车的计算机视觉定位定向方法[J].闽江学院学报,2014(5):73?80.
[4] 吴卫国,陈辉堂,王月娟,等.基于彩色图像的移动机器人定位[J].机器人,1999,21(5):340?346.
[5] KAEHLER A, BRADSKI G R. Learning OpenCV [M]. US: O′Reilly, 2009.
[6] 马爽,樊养余,雷涛,等.一种基于多特征提取的实用车牌识别方法[J].计算机应用研究,2013,30(11):3495?3499.
[7] 徐德,谭民,李原.机器人视觉测量与控制[M].2版.北京:国防工业出版社,2014:180?183.
[8] 胡山,许增朴,于德敏,等.基于彩色色标的服务机器人定位研究[J].制造业自动化,2005,27(2):38?40.
[9] PARK D, KAPUSTA A, YOU K K, et al. Learning to reach into the unknown: selecting initial conditions when reaching in clutter [C]// Proceedings of 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Atlanta: IEEE, 2014: 630?637.
[10] 阴国富.基于阈值法的图像分割技术[J].现代电子技术,2007,30(23):107?108.
[11] 应在恩,李正洋,平雪良,等.基于双目视觉动态跟踪的机器人标定[J].计算机应用研究,2014,30(5):1424?1427.
[12] 林开颜,吴军辉,徐立鸿.彩色图像分割方法综述[J].中国图象图形学报,2005,10(1):1?10.
[13] 查志强.复杂背景下的快速车牌识别技术研究[D].南京:南京理工大学,2013.
