一种风板自动控制装置设计及测试
2017-01-12江兴盟
冯 笑 江兴盟
(郑州铁路职业技术学院 河南郑州 450052)
一种风板自动控制装置设计及测试
冯 笑 江兴盟
(郑州铁路职业技术学院 河南郑州 450052)
本文提出了一种以单片机STC12C5A60S2为核心的风板自动控制装置设计方案,结合PWM技术和PID控制器来调节风扇风力大小,从而实现对风板转角的控制。在设定的功能模式下对风板转角控制进行了测试,结果表明了该系统工作的可靠性和稳定性,系统具有设计合理、简单、精度较高等特点。
PWM PID 直流风机 角位移传感器
1 引言
随着信息技术的不断发展,角度测量与控制被广泛应用于新能源利用、人工智能、机械加工及制造等领域,及时准确的获取角度信息并对其进行实时控制,在自动化控制过程显得尤为重要[1]。为此设计并制作了一种风板自动控制装置,通过控制两个风机的风量大小来自动控制风板旋转到预置角度。
2 系统总体方案
直流电机选择脉冲宽度调制(PWM)调速,利用微处理器的PWM输出控制风机转速、调节风力大小。如图1所示,该系统的总体方案主要包括主控模块、角度测量模块、电机工作模块、电源模块等四部分,其中主控模块有单片机、键盘输入、液晶显示及声光报警等组成。
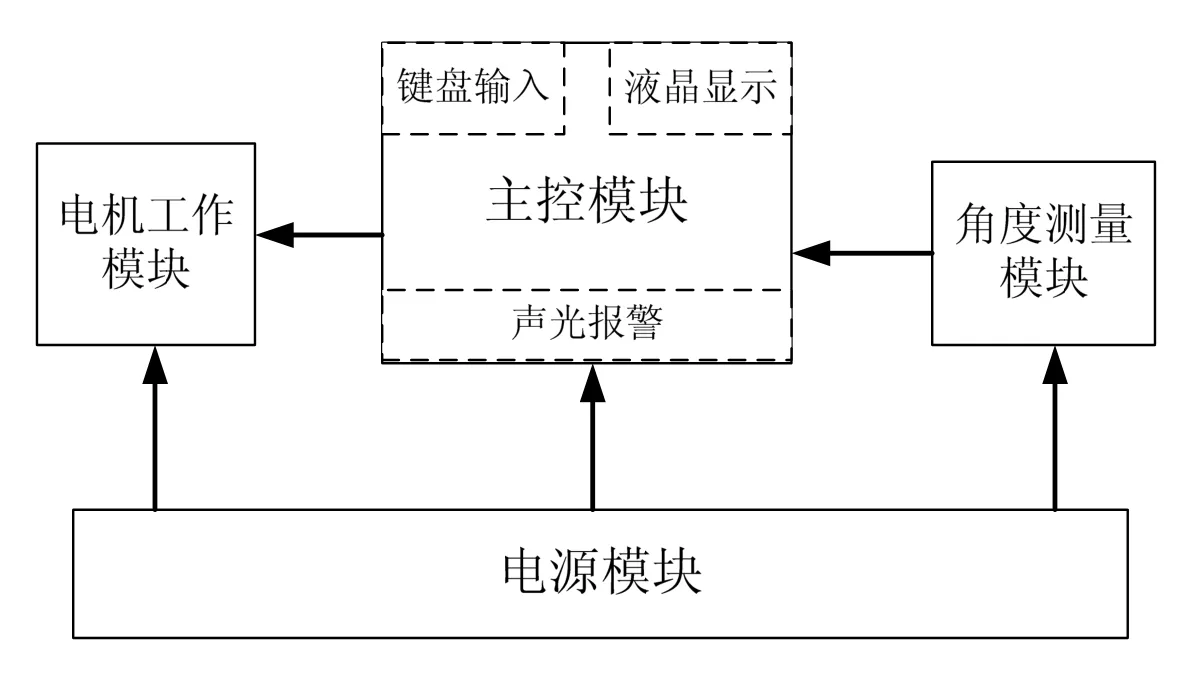
图1 系统总体方案
3 理论计算与分析
3.1 直流电机的PWM调速原理
直流电机的PWM是通过控制直流电源通断的频率即改变直流电机电枢上的“占空比”,从而改变负载上平均电压的大小,达到控制电机转速的要求[2][3]。电动机的平均电压Ud为:

式中:T为开关周期;ton为导通时间;ρ为占空比,Us为直流电源。
3.2 角度控制算法设计
由于对风板的角度控制采用闭环方式,会存在振荡、超调和稳定性等问题,因此需要加入适当的调节算法使其达到准确控制目的。PID调节器具有原理简单,适用面广,参数选定比较简单等优点,成为温控系统、角度控制系统等常用的调节算法[3][4]。相比较于位置式PID控制算法,增量PID控制算法具有诸多优点,因此,本文采用数字增量式PID控制算法[5]。增量PID算法公式如下所示:

式(1)中:KP为比例系数;KI为积分系数; KD为微分系数。
最终可简化为:

式中:

电机转速是由单片机PWM输出控制,而电压的大小由PWM调节,因此,只要每隔一个采样周期通过改变PWM占空比的方法改变电机电枢上的电压,实现PID调节控制。基于PID的反馈控制策略需要根据系统动力特性和响应要求,适当调节PID参数,以确定最优参数值[6]。
4 硬件设计
4.1 主控模块
系统以STC12C5A60S2单片机为控制核心,STC12C5A60S2是宏晶科技生产的一款高速、低功耗、强抗干扰的8051单片机,内部集成MAX810专用复位电路、2路PWM、8路高速10位AD转换[7]。角度测量采用WDD35D4精密电阻式角度传感器,它具有机械寿命长,分辨率高,转动顺滑,动态噪声小的优良性能。显示部分采用LCD1602液晶显示器,声光报警部分采用发光二极管与蜂鸣器。如图2所示主控模块硬件电路图。
4.2 风机工作模块
系统左右各有一个相同直流风机,风机驱动采用L298N桥式电机驱动芯片, L298N工作电压高、输出电流较大,内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机,具有信号指示、转速可调、抗干扰能力强、具有过电压和过电流保护、PWM脉宽平滑调速,而且能够使用TTL电平进行控制。为保护控制器使系统工作稳定,在STC12C5A60S2单片机与L298驱动之间增加光耦隔离电路。
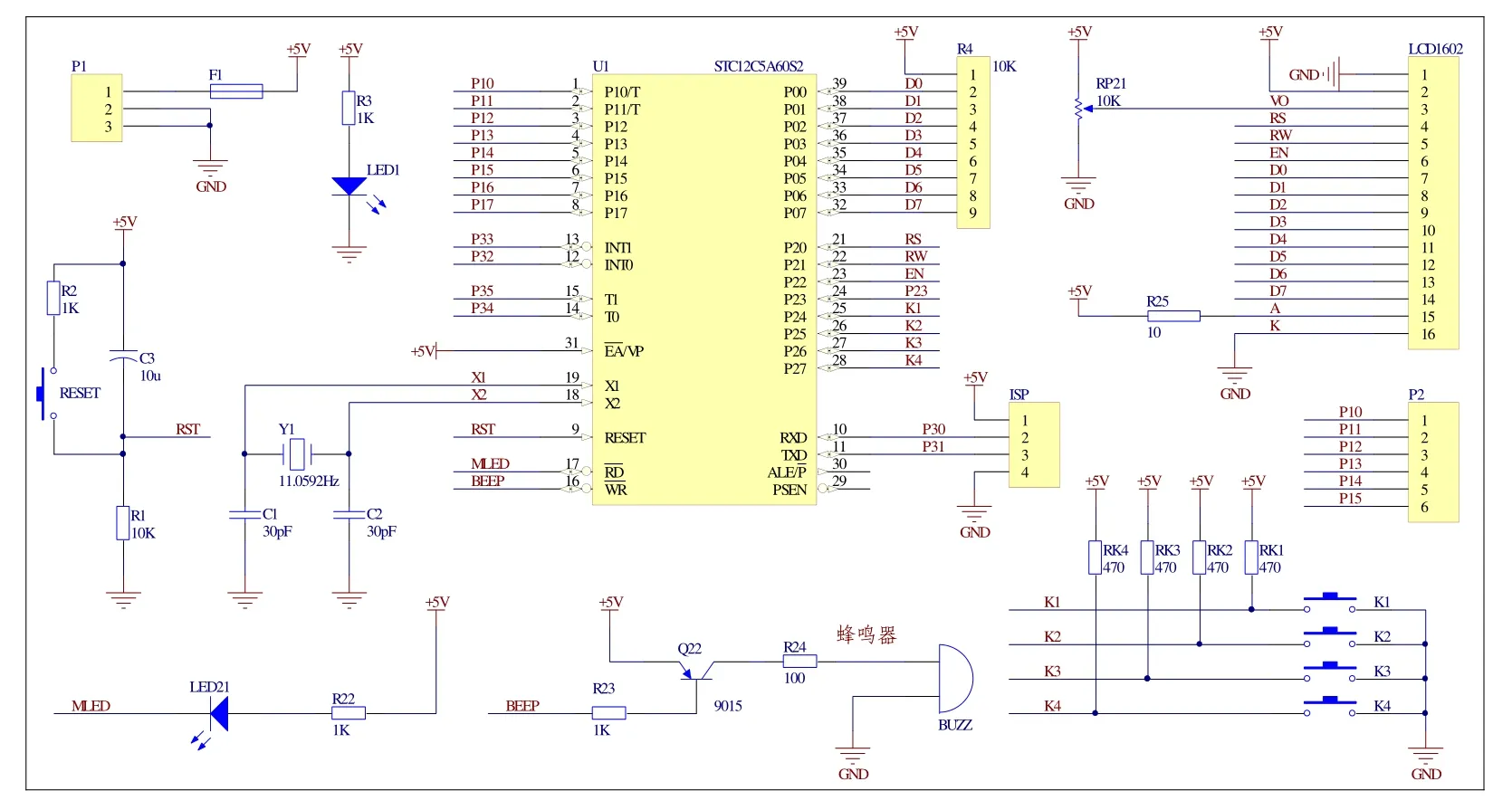
图2 主控模块硬件电路图
5 软件设计
系统软件设计采用模块化设计方式,如图3(a)所示系统软件的总体流程图,其中功能1为预置风板控制角度,功能2为预置两个控制角度,功能3与功能4为加了重物10g砝码后的角度控制模式,分别于1、2控制要求相同。如图3(b)中断服务程序,用定时器中断方式采集角度信息,通过PID算法控制单片机输出的PWM“占空比”方法实现风板控制功能。
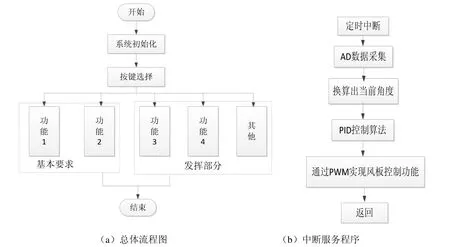
图3 系统程序流程图
6 系统测试
装置制作实物如图4所示,风板控制装置包括滑道、直流风机(含底座)、支架、角度指示盘及角位移传感器,其中传感器固定于旋转轴上,风板固定于旋转轴上,实现同步旋转。系统测试前首先进行系统调试,使得单片机通过角度传感器采集并且实现显示角度即风板当前的角度值,达到与角度盘中指示值一一对应关系的要求。
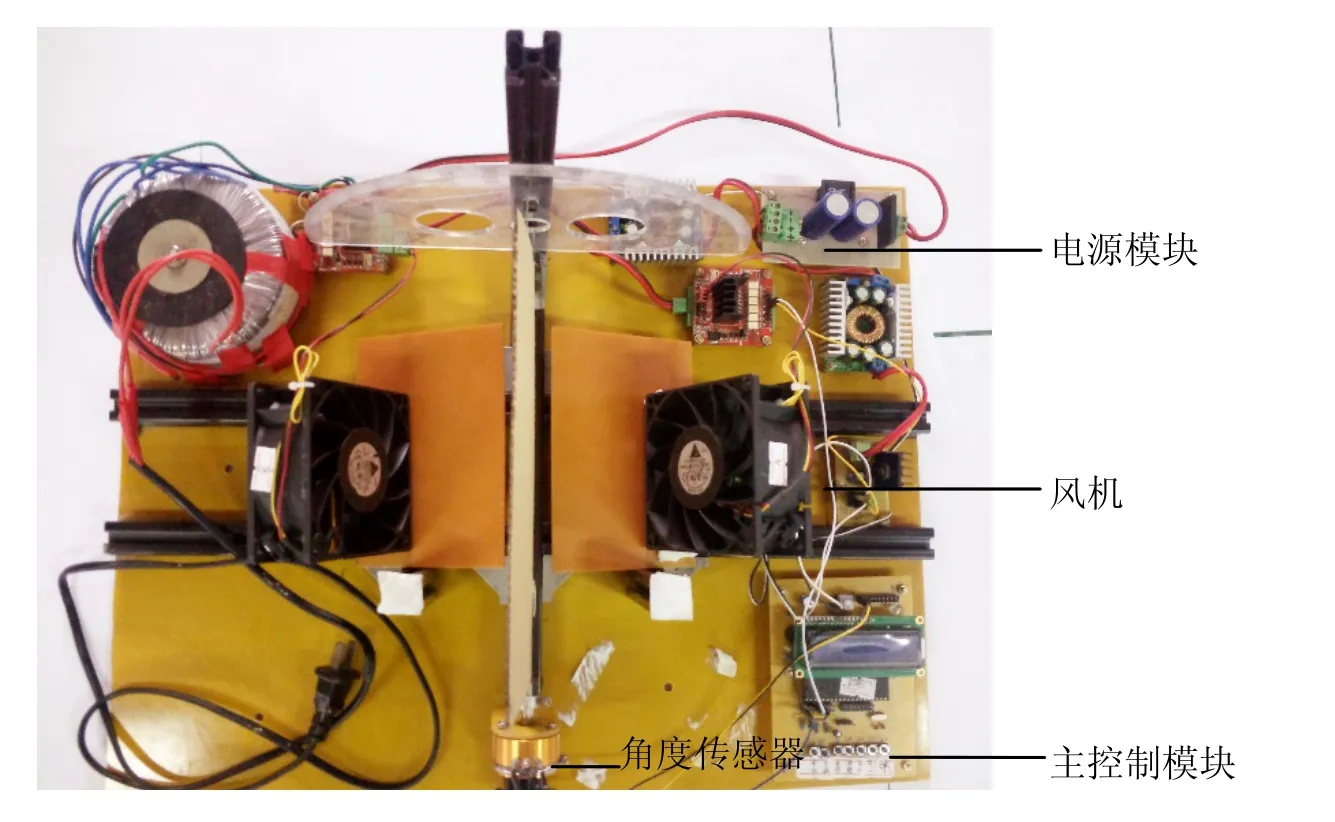
图4 装置制作实物
6.1 基本要求
(1)预置风板控制角度45°:系统运行后观察装置风板角度的实际值,并且秒表计时风板过渡时间t1和停留时间t2。如下表1所示测试数据反复测量5次,实际预置角度误差不大于5°,过渡时间不大于10s,停留时间的误差不大于1s,均满足误差要求。
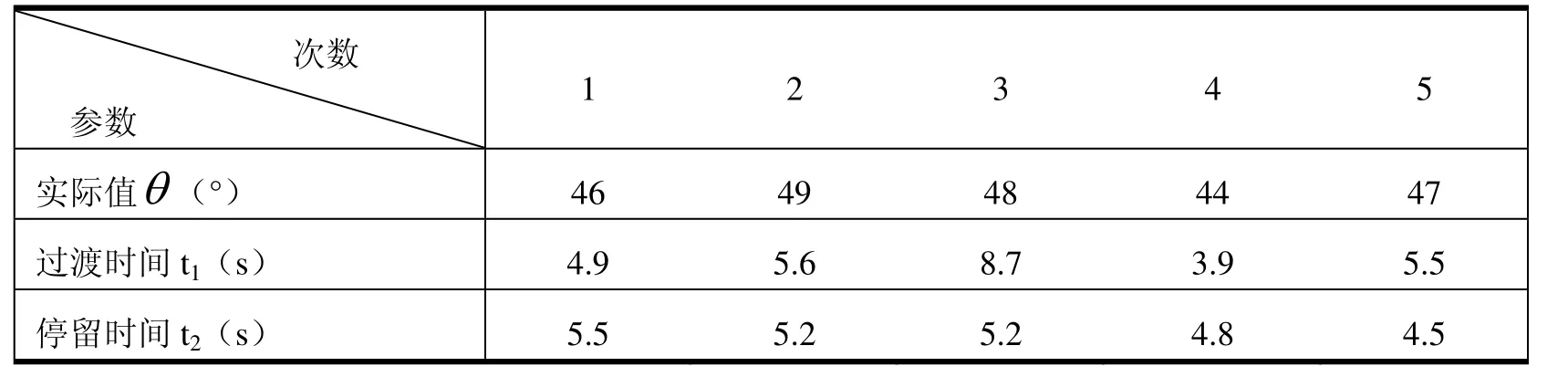
表1 测试数据
(2)预置风板控制角度50°与80°:如下表2所示测试数据,根据设计要求(第一次到达预置角度时间不大于10s,两角度间摆动周期不大于5s,到达预置角度误差不大于5°)可知,满足系统设计误差要求。
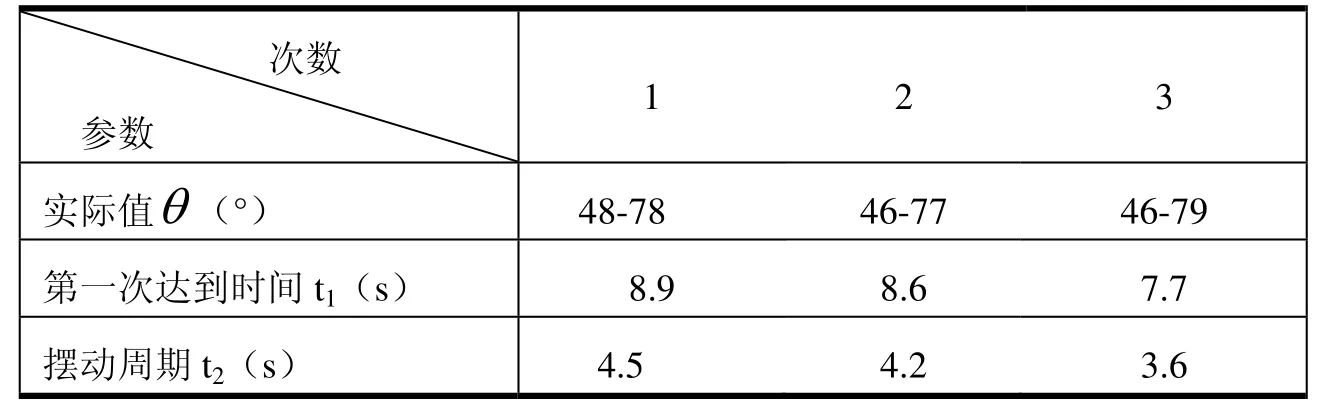
表2 测试数据
6.2 发挥部分
加入10g砝码后系统工作的测量数据如下。
(1)预置风板控制角度70°:如下表3所示测试数据,测量误差均达到设计要求。
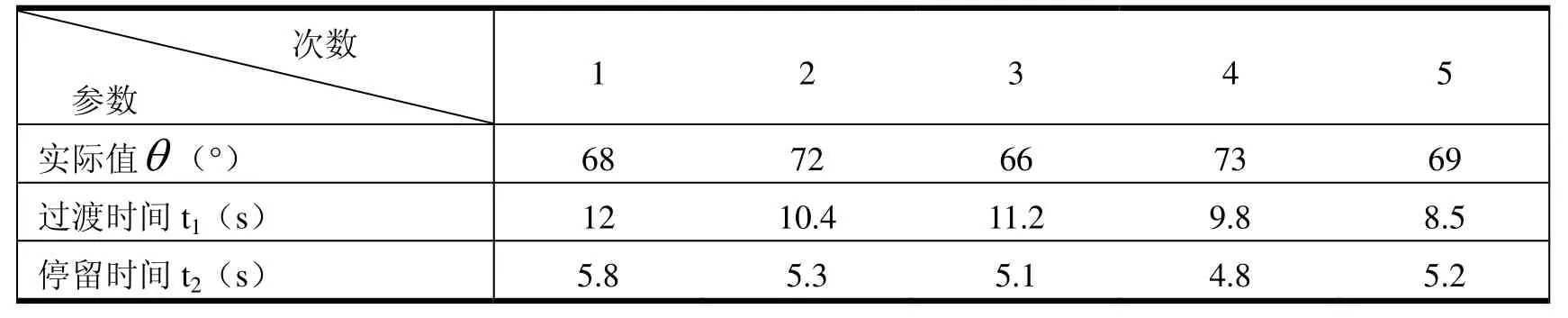
表3 测试数据
(2)预置风板控制角度50°与80°:如下表4所示测试数据,测量误差基本达到设计要求。
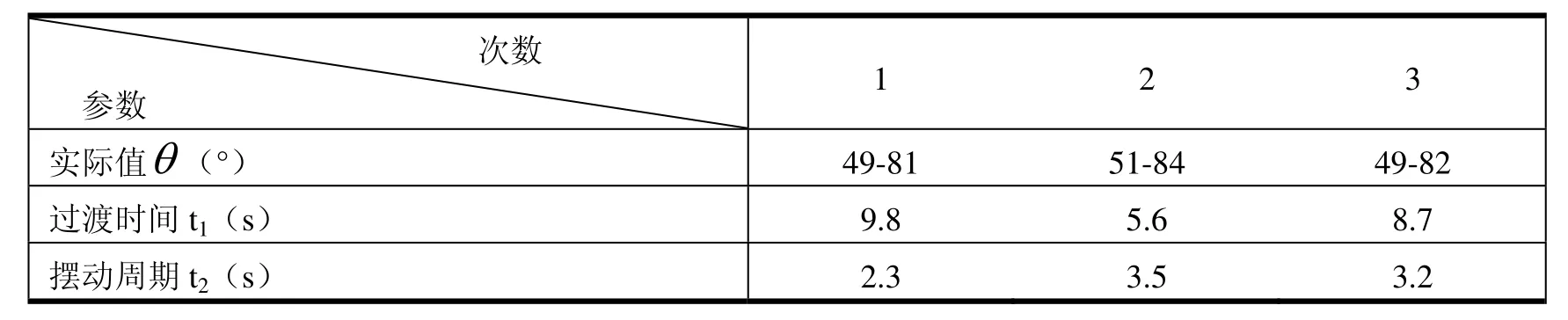
表4 测试数据
由测试结果可知风板控制系统满足了系统设计的基本控制要求和发挥设计要求,但仍然存在较小误差,主要干扰因素来自于两风机的微小差异、电机转速的非线性、电源的电磁干扰以及传感器与横轴同步误差等。
7 结论
基于单片机的风板控制装置设计以STC12C5A60S2单片机为控制核心,通过PWM调压和PID转速调节方法来控制风机转速,实现了风板准确旋转到设定角度的自动控制。系统设计简单,响应速度快,测量误差较小,具有工作的可靠性和稳定性等特点。该风板控制系统可以应用于角度测量及控制等技术领域。
[1]陈素芹,贾冕茜,余红英,陶玉贵.基于MKL26Z256VLL4的风板控制系统设计[J].西昌学院学报(自然科学版),2015,29(4):32-34.
[2]王效华,牛思先.基于单片机PWM控制技术的实现[J].武汉理工大学学报,2010,31(1):94-98.
[3]崔鸣,尚丽,颜廷秦.基于ARM的帆板控制系统设计与实验分析[J].实验室研究与探索,2012,31(9):57-62.
[4]王宝刚,李东洁.基于STC89C52的水温自动控制系统设计[J].制造业自动化,2012,34(9):111-113.
[5]吴强,韩震宇,李程.基于增量式PID 算法的无刷直流电机PWM 调速研究[J]. 机电工程技术,2013,42(3):63-65.
[6]李先允.自动控制系统[M].北京:高等教育出版社,2005.
[7]智海素,李英辉,曲昀卿.基于单片机控制的帆板系统的设计与测试[J].制造业自动化,2012,34(9):133-135.
Design and Test of the Wind Board Control Device
FENG Xiao JIANG Xing-meng
(Zhengzhou Railway Vocational and Technical College Zhengzhou Henan 450052 China)
A design scheme of the wind board automatic control device based on microcomputer STC12C5A60S2 is proposed in this paper, and the device is combined by the technology of PWM and PID controller to adjust the fan’s wind, so as to realize the control of the wind board’s turn angle. In the setting of the function pattern the control for turn angle is tested, and the results show that the system work is reliable and stable. And the system has the reasonable design, simple structure, high precision and so on.
PWM PID DC fan angular displacement sensor
A
1673-1816(2016)04-0075-05
2016-03-15
冯笑(1987-),男,河南南阳人,助教,硕士学位,研究方向电子与通信技术。
