五自由度混联机器人优化设计与运动学分析
2017-01-09张东胜许允斗侯照伟姚建涛赵永生
张东胜,许允斗,2,侯照伟,姚建涛,2,赵永生,2
五自由度混联机器人优化设计与运动学分析
张东胜1,许允斗1,2,侯照伟1,姚建涛1,2,赵永生1,2※
(1. 燕山大学河北省并联机器人与机电系统实验室,秦皇岛 066004; 2. 燕山大学先进锻压成形技术与科学教育部重点实验室,秦皇岛 066004)
为提高农业自动化程度,拓宽并联机构在农业工程领域的应用,提出一种存在连续转轴、关节数目少、易于控制的两移一转运动冗余平面并联机构,该并联机构任意位置的转轴均为相互平行的连续转轴,使其具备良好的灵活性。基于此平面并联机构,构造出了多种五自由度混联机器人,首先建立了五自由度混联机器人的运动学模型,并对其进行了奇异分析,给出了减少机构奇异位型的条件;然后基于灵活性指标,对并联机构进行了尺寸优化,绘制了用于选取结构尺寸的性能图谱,且借助有限元软件对基于优化所得结构尺寸绘制的具有运动冗余特性的平面机构进行了结构拓扑优化,,完成了整体结构优化前后的静力学分析与对比,结果显示优化前后整体变形仅增大0.51%,优化前后机构优化部分的质量减少33.02%,满足机构变形要求。该混联机器人具有结构简单、运动学模型简单、结构刚度高和模块化程度高的特点,且其结构的变胞性有助于实现机构运动和驱动冗余模式的切换,增强了机器人的可研究性。该文可为混联机器人运动学分析及优化设计提供参考。
机器人;设计;优化;平面并联机构;运动冗余;自由度;变胞机构
0 引 言
农业机器人技术是当今国际农业机械化研究的前沿领域,近年来随着新型农业的发展及新技术的开发,农业机器人已经得到了广泛的应用,如插秧、耕作、果蔬采摘、伐木、筛种、产品包装机器人等[1-4]。农业生产的多样性及农业作业的复杂性等特点对农业机器人的先进性及实用性提出了较高的要求。
农业机器人不再仅仅局限于传统的串联机构,农业生产方式也走向多样化市场,其中专门用于农业领域的并联机器人具有较高的研究价值[5-7]。并联机构与串联机构相比具有结构紧凑,刚度高,承载能力大等优点,使得并联机器人在某些农业领域有着较高地位和应用价值[8-9]。并联机构又分为空间和平面并联机构,其中平面并联机构具有结构简单、运动学模型简单、易于控制等特点,所以平面并联机构受到很多研究人员的重视[10-12]。基于平面并联机构结构、运动特性简单及易于实现轨迹规划的特点,很多学者提出了不同的平面并联机构并对其进行了深入的理论研究,例如:平面5R[13]、PRRRP[14]、3(4)-RRR[15-16]、3-RPR[17]并联机构(其中R、P分别代表转动副、移动副)、二自由度五杆移动机器人[18]等。然而现代很多农业领域覆盖包括食品包装、种子筛选、果实分类、果蔬搬运、采摘及运输等。通常情况下,普通的少自由并联机构无法完成此类作业,而多轴联动机器人[6,19-20]便成为首选目标。基于平面并联机构构造出的五自由度混联机器人,结合了平面并联机构和串联机器人的优点,既有平面并联机构承载能力大、结构及运动学模型简单的特点,又有串联机构工作空间大且灵活的特点。
齐二机床厂与清华大学联合研制出大型龙门式五轴联动混联机器人XNZ2430[21],该混联机器人并联部分为能够实现垂直平面内两移动自由度的平面机构,在动平台上串联两个自由度的摆头,附加可移动工作台,从而实现机器人的五轴联动。麻省理工学院设计了一种小型的混联五轴联动机器人MIT-SS-1[22],平面并联机构3PRR实现垂直面内的2个移动和回转运动,附加工作台的移动和转动2个运动。Rosyid等[23]提出了一种基于平面并联机构3PRR构造出的五自由度混联机器人,该混联机器人由相互正交的两组3PRR并联机构组成。从上述混联机器人构型可知,平面并联机器人在现代机器人中具有非常重要的地位。然而除文献[18]提到的一种基于平面二自由度并联机构所构造的种苗移摘的机器人外,少有能够应用到农业领域的混联机器人。
本文综合以上内容提出了一种结构简单、关节数目少、刚度高的两移一转三自由度平面并联机构,并基于此并联机构构造出了存在连续转轴、模块化程度高、整体结构简单的五自由度混联机器人构型;建立了五自由度混联机器人运动学模型,并对机构进行了奇异性分析,然后以动平台的灵活性指标对平面并联机构的结构尺寸进行了优化,绘制了用于选取结构尺寸的性能图谱,且借助有限元软件对基于优化所得结构尺寸绘制的具有运动冗余特性的平面机构进行了结构拓扑优化,达到在保障机构刚度的前提下降低分支质量,并对拓扑优化前后整体结构进行了静力学对比分析。
1 五自由度混联机器人的构型设计
在机器人的研究领域,由于机器人的不同构型,会对工作空间、整体刚度以及精度等机器人性能造成不同影响,故关于机器人结构的综合及对比分析尤为重要,这使得机器人的构型设计成为机器人产品化之前的一项重要的工作。本节将首先给出三自由度平面并联机构的详细设计原则,然后列出串联部分的几种构型。
1.1 平面并联机构
三自由度平面并联机构如图1所示,由机架、动平台及三条结构相同的PRR分支组成,该平面机构动平台具有沿和轴方向的移动和绕轴的转动自由度(2T1R)。如图1所示,左上分支1和左下分支2中连接动平台的R副共轴,此并联机构共有8个关节,运动副只有移动副和转动副,使其具备机构简单的特点。当右上分支3和动平台共线时,此并联机构即发生奇异,影响机构的自由度,对机构的运动学以及动力学均造成较大的影响。除此之外,在实际应用中并联机构的奇异位型很大程度上影响了本身的工作空间。
1.左上分支 2.左下分支 3.右上分支 4.右下分支
1.Upper left branch 2.Lower left branch 3.Upper right branch 4.Lower right branch
注:-为参考坐标系,下同。
Note:-is reference coordinate system, the same as below.
图1 三自由度平面并联机构
Fig.1 3-DOF planar parallel mechanism
驱动冗余[5,24-26]可以有效减少奇异、提高并联机构的刚度、增大工作空间等,从而提高机器人的力传递性能,改善机构的性能,使机构在原始的奇异位形也能正常工作。因此驱动冗余并联机器人已经成为并联机器人家族中不可缺少的一部分,而日益成为研究热点。所以为增加机构的整体刚度、有效减少奇异位型,在2T1R平面并联机构3PRR基础上添加冗余驱动分支(图1中虚线部分)构成具有冗余驱动的平面并联机构(10个关节)。这种方案可有效减少机构的奇异位型,增大机构的灵活性、有效工作空间及整体结构刚度。
虽然通过添加冗余驱动可以减少机构奇异、增大有效工作空间,但其缺点是会使机构产生内力,给机构的控制带来一定的难度[27-29]。如图2所示(针对图1a所示结构),采用引入中间连杆5的方法不仅能有效的减少奇异位型[30],而且能很好的消除因冗余驱动而造成的内力。图2所示的运动冗余平面机构的动平台与图1一样具有两移一转3个自由度,其共有11个关节。该机构的第4个驱动增加的是连杆5和动平台之间的姿态自由度,故该机构的4个驱动中不含有冗余驱动。
如果将动平台和中间连杆之间的转动副锁死,那么该机构即成为上述具有冗余驱动的平面并联机构。结构的变胞性有助于实现机构运动冗余和驱动冗余模式的切换,使其在后期研究工作中,不仅可以研究运动冗余平面并联机构的控制策略,而且还可以研究具有冗余驱动平面并联机构的控制策略,增强了机器人的可研究性。
1.2 混联机器人构型
构造五自由混联机器人关键在于弥补动平台方向的方位调整能力和方向的移动能力(TR构型:具有移动和方位调整能力的机构)。上述平面机构为 2T1R并联机构,所以还需要添加一个移动和一个转动自由度,从而构成五轴联动。这可通过将具有一个转动自由度的工作台附加于可移动平台上(如图3a和3b所示),或者在动平台下方添加具有一个转动自由度的摆头和可移动的平台的方式(如图3c所示)来构造五自由混联机器人。
如上所述,该运动冗余平面并联机构的动平台能实现沿水平和竖直方向的移动、绕方向的方位调整;可转动工作台/摆头可实现相对动平台另外一个方向的方位调整;可移动平台移动方向与并联机构所在平面垂直,用于实现沿方向的移动,从而形成机器人的五轴联动。
对图1、图2和图3中构型方案进行排列组合,共可构造出15种五自由度混联机器人结构,其中驱动冗余混联机器人6种、运动冗余混联机器人3种,既非驱动冗余又非运动冗余混联机器人6种。
通过观察图1给出的驱动冗余平面并联机构:图1a,4条分支上下和左右对称布置,且尺寸相同;图1b,4条分支左右对称布置,两两尺寸相同。图1a所示方案具有正反解简单、结构简单、控制容易的特点,图1b所示方案具有结构紧凑的特点。通过观察图3给出的3种TR构型:图3a和3c结构的相似之处在于弥补的是动平台绕轴方向的转动能力,图3b弥补的是动平台绕轴方向的转动能力。3种方案均可实现混联机器人的五轴联动,但是图3b所示方案与另外2种方案相比具有更易于保障结构刚度的特点。
通过以上结果的对比分析,结合图3和图2b即可从上述15种混联机器人中优选出一种运动冗余五自由度混联机器人。此类型五自由度混联机器人的运动学模型简单、结构简单,具有运动冗余机器人的特性,以及串联环节结构刚度大的优点。下文将对此种机器人进行分析。
2 五自由度混联机器人运动学模型
结合图2和图3b组成运动冗余五自由度混联机器人,其三维模型和结构简图如图4所示。为了更好的对机构进行分析,需要建立该机构的参数模型,在动平台上建立动系-,在定平台上建立参考坐标系(定系)-。在定系中,转动副中心A的位置向量为;点、、的位置向量分别表示为、、。
2.1 位置分析
2.1.1 位置反解
由于该五自由度混联机器人的并联部分和串联部分为独立设计,所以目标体的位姿由并联和串联部分协调完成,且两部分的运动解耦,故在此仅给出并联部分的运动学模型。平面并联机构动平台的参考点为点,姿态矩阵为。
动平台点在定系中的位置向量为

式中=(0)T为点在动系中位置向量;为动平台的长度,mm;为点在定系中的位置向量。
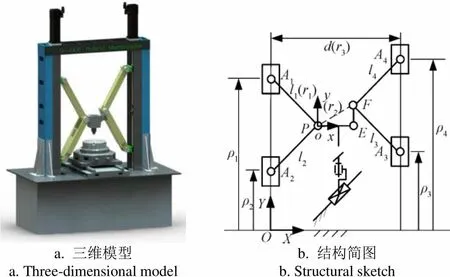
a. 三维模型a. Three-dimensional modelb. 结构简图b. Structural sketch
注:为动坐标系;为动平台左侧转动副的中心;为动平台右侧转动副的中心;为中间连杆上侧转动副的中心;A(=1,2,3,4)为滑块上转动副的中心;l(=1,2,3,4)为各分支的长度,mm;ρ(=1,2,3,4)为各分支的移动副中心到轴的距离,mm;为两侧滑块在方向的距离,mm;r(=1,2,3)为无量纲参数。
Note:-is moving coordinate system;is center of revolute joint located in left of moving platform;is center of revolute joint located in right of moving platform;is center of revolute joint located in top of intermediate link; A(=1,2,3,4) is center of revolute joint located in slider;l(=1,2,3,4) is branch length, mm;ρ(=1,2,3,4) is distance from the center of prismatic joint to theaxis, mm;is horizontal distance of sliders on both sides, mm;r(=1,2,3) is dimensionless parameter.
图4 五自由度混联机器人
Fig.4 5-DOF hybrid serial-parallel manipulator

式中为A点在定系中的位置向量;单位向量=(0 1)T,与定系的轴同向;ρ为移动副中心到轴的距离,mm;=(0)T为34直线与轴交点在定系中的位置向量,为两侧滑块在方向的距离,mm。
设分支杆的长度为l(=1,2),那么

将式(3)代入式(4)可得
(5)
式(5)展开化简得

式中1i为一次项系数;1i为常数项。
设动平台和连杆之间的角度(用于体现机构的奇异性),rad,那么
式中为点在定系中的位置向量;为单位矩阵;为连杆相对动平台的姿态矩阵;为连杆的长度,mm。
根据分支3,4的定杆长可知

式(8)展开化简得
(9)
式中*为中间代换量;2i为一次项系数;2i为常数项。
当给定目标体的抓取点位置和抓取方向时,即可求解出移动平台和旋转工作台的输入量,并可折射出动平台的位姿,然后结合式(6)和式(9)即可根据动平台的给定位姿和动平台和之间的角度,求解出并联机构的各个驱动的输入量。
2.1.2 位置正解
不同于空间并联机构,平面并联机构的位置正解非常简单,可通过几何法求出。当给定4个驱动分支的输入时,即可快速求解出动平台的位姿。
当给定驱动的输入量ρ(=1,2,3,4),转动副中心A的位置即可确定。分别以点1和2为圆心,做半径为的圆,其交点记为点;分别以点3和4为圆心,做半径为的圆,其交点记为点;分别以点和为圆心,以和为半径做圆,其交点记为点。平面并联机构的正解需考虑并联机构的几何特点,对圆交点进行取舍得到唯一的位置正解,例如:交点点和点应取机架左右移动副之间的点,交点需根据的具体值进行取舍。
2.2 雅克比矩阵的建立
将式(2)对时间求导可得

将式(4)对时间求导可得

将式(3)对时间求导并代入式(11)中可得
(12)
由连杆长度为,得

将式(13)对时间求导可得
(14)
联立式(10),(14)可得

将式(8)对时间求导,并对其进行整理
(16)
将式(16)记为
由式(17)可得
(18)
将式(18)代入式(15)中可得

结合式(12)和式(19)可得
(20)
由式(20)可知,在保证分支1、2不重合,分支3、4不重合的前提下,直线不通过点(0<<π/2),矩阵和满秩,机构即可避免发生奇异。值得一提的是,动平台和之间的角度可以体现机构的奇异度:当趋近于π/2时,机构远离奇异;当趋近于0时,机构接近奇异。
3 尺寸及结构拓扑优化
机器人优化设计是对机器人综合性能的量化,在机器人的设计阶段,优化可分为尺寸优化和机构拓扑优化。尺寸优化是在保证机器人性能的前提下获取较佳的结构参数;结构拓扑优化是在保证机器人结构刚度的前提下获取较佳的结构构型。
3.1 并联机构尺寸优化
为了使机构远离奇异,取=π/2,则动平台和连杆可看成一个新的动平台结构,其长度为,mm。。为简化优化参数,定义=3,则机构所需优化的尺寸参数为、、。
尺寸参数无量纲化[14],消除机构的物理属性,令=(++)/3,则1=/,2=/,3=/(为归一化因数)。为满足机构的可装配性,无量纲参数1,2,3应满足以下方程
据式(21),分别以1、2和3为两两垂直的坐标轴,可以得到该机器人设计空间的三维表示形式,创建一个如图5a所示的设计空间,图5a中的三角形为该机构的设计空间。将空间的三角形转换到二维平面中(如图5b所示),其转换关系式为
(22)
式中、为无量纲参数。
由于此并联机构构型主要限制动平台在方向的运动能力,丝杠的行程主要限制动平台在方向的运动能力。所以接下来以动平台的灵活性指标对平面并联机构的结构尺寸进行优化,定义动平台中心点的有效行程(动平台任意点的转动能力达到±π/6),将动平台的有效行程与理论最大行程(3−2)之比作为目标值[=/(3−2)],则目标值∈(0,1)。借助Matlab绘制性能图谱,如图6所示。
观察图6中可以得到:优化区域轮廓趋于三角形。通过分析图中三角形边所在位置的优化值,可以较方便的获得较优区域。
由于结构尺寸优化并没有最优尺寸,而只能取得相对较好的结构尺寸[14],所以为获得较大的有效行程比,可以取目标值>0.7的坐标点。当坐标(,)=(1.47, 0.5)时,=0.78>0.7,由式(22)可知2==0.5,取动平台长度=180 mm,根据归一化因数,求出=388.22 mm,=560.46 mm。运用此组优化数据所得的结构尺寸,设计出的三维模型如图4a所示。
3.2 结构拓扑优化
在尽量保证机器人结构刚度的前提下,以材料质量为状态变量对模型分支杆(材料定义为结构钢)进行优化。利用ANSYS Workbench中的拓扑优化模块对机构的上下分支杆结构进行优化,以达到尽量维持原结构刚度基础上,降低分支杆质量的目的。
上分支和下分支优化前结构分别如图7a和7b所示,优化目标:单分支允许变形量小于10%,分支减轻质量比大于25%。分支杆可以看做二力杆,受到重力、沿杆长方向拉(压)力、沿方向的压力。
如果将分支杆与滑块连接端视为固定端,分支杆水平布置,在分支另一端加载沿杆长方向拉力和沿方向的压力各100 N。为使拓扑优化所得结果更加直观,鉴于分支结构重力方向为轴方向(位于平面中),所以将分支受杆长方向的拉力与重力归为一组,将分支杆受垂直于平面的压力(轴方向的压力)为另一组,然后对上述两组单独进行优化。上分支优化结果如图8a和8b所示,下分支优化结果如图8c和8d所示,其中图8a和8c为分支受重力和拉力时拓扑结果,图8b和图8d为分支受压力时拓扑结果。
拓扑优化结果为不规则形状,在实际的结构设计中,考虑到零件外观、加工工艺性、可实施性及应力分布问题等情况,不能将所有浅色区域(虚线内部)全部切除,参考图8所示拓扑优化结果,优化后模型如图9所示。为了更好的验证优化结果,对上分支和下分支进行有限元对比分析,并且将上下单分支的静刚度分析结果及减轻质量比进行汇总,参考表1。
通过观察对比分析表1中的数据可知:与优化前分支相比,上分支的变形量增大0.001 7 mm,占原分支变形量的9.66%;质量降低了2.744 8 kg,占原分支质量的36.79%;下分支的变形量增大0.001 4 mm,占原分支变形量的6.28%;质量降低了3.126 1 kg,占原分支质量的29.24%。上下分支均满足单分支允许变形量小于10%及分支减轻质量比大于25%的优化目标。

a. 优化后上分支a. Upper branch after optimizingb. 优化后下分支b. Lower branch after optimizing

表1 分支杆结构优化前后对比
表1中的数据针对的是上下单分支,为了进一步提高结果可靠性,将优化分支导入模型,通过有限元软件对整体机构进行分析对并联机构整体结构进行了静力学分析。图10给出了在动平台上施加沿方向各100 N情况下的初始位姿整体变形,其中图10a为分支优化前位移变形,图10b为分支优化后位移变形。
a. 优化前位移变形
a. Total displacement deformation before optimizing
由图10所示机器人整体结构受力变形前后的对比可知,机器人优化后整体变形较优化前整体变形仅仅增大了0.51%,但优化前后机构优化部分的质量减少了33.02%,达到了结构拓扑优化的目的,这对机构整体性能的提升起到良好的推进作用。
4 结 论
1)提出一种结构简单、存在连续转轴、关节数目少的2T1R运动冗余平面并联机构,并构造出了多种五自由度混联机器人。
2)推导出了五自由度混联机器人的位置正反解,体现出了机构运动学模型简单的特点,建立了并联部分的速度雅克比矩阵,并对其进行了奇异分析,给出了减少机构奇异位型的条件及远离机构奇异的原则。
3)基于灵活性指标,对并联机构进行了尺寸优化,绘制了用于选取结构尺寸的性能图谱;借助有限元软件对具有运动冗余特性的平面机构进行了结构拓扑优化,达到减少机构质量的目的,并分别完成了单分支及整体结构优化前后的静力学分析与对比,结果显示优化前后整体变形仅增大0.51%,优化前后机构优化部分的质量减少33.02%,验证优化结果的合理性。
本文研究为该五自由度混联机器人后期样机的研制提供了理论依据,为拓展农业机器人的应用范围提供了参考。
[1] Hayashi S, Yamamoto S, Saito S, et al. Field operation of a movable strawberry-harvesting robot using a travel platform[J]. Japan Agricultural Research Quarterly: JARQ, 2014, 48(3): 307-316.
[2] Oberti R, Marchi M, Tirelli P, et al. Selective spraying of grapevines for disease control using a modular agricultural robot[J]. Robotic Agriculture, 2015, 30:1-13.
[3] 权龙哲,张冬冬,查绍辉,等. 三臂多功能棚室农业机器人的运动学分析及试验[J]. 农业工程学报,2015,31(13):32-38.
Quan Longzhe, Zhang Dongdong, Zha Shaohui, et al. Kinematics analysis and experiment of multifunctional agricultural robot in greenhouse with three arms[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(13): 32-38. (in Chinese with English abstract)
[4] Agarwal N, Thakur R. Agricultural robot: intelligent robot for farming[J]. International Advanced Research Journal in Science, Engineering and Technology, 2016, 3(8): 117-181.
[5] 牛雪梅,高国琴,刘辛军,等. 三自由度驱动冗余并联机构动力学建模与试验[J]. 农业工程学报,2013,29(16):31-41.
Niu Xuemei, Gao Guoqin, Liu Xinjun, et al. Dynamics modeling and experiments of 3-DOF parallel mechanism with actuation redundancy[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(16): 31-41. (in Chinese with English abstract)
[6] Xue Ziyun, Zhang Bin, Zhang Dongbo. Design and kinematic analysis of a new 3-DOF hybrid mechanism[C]// Advanced Materials Research. Trans Tech Publications, 2014, 950: 69-74.
[7] 金波,林龙贤. 果蔬采摘欠驱动机械手爪设计及其力控制[J]. 机械工程学报,2014,50(19):1-8.
Jin Bo, Lin Longxian. Design and force control of an underactuated robotic hand for fruit and vegetable picking[J]. Journal of Mechanical Engineering, 2014, 50(19): 1-8. (in Chinese with English abstract)
[8] 张金柱,金振林,陈广广. 六足步行机器人腿部机构运动学分析[J]. 农业工程学报,2016,32(9):45-52.
Zhang Jinzhu, Jin Zhenlin, Chen Guangguang. Kinematic analysis of leg mechanism of six-legged walking robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(9): 45-52. (in Chinese with English abstract)
[9] 牛军川,张福亮. 三平移(3-PRRP~(4R))并联减振机构的设计与刚度分析[J]. 农业工程学报,2016,32(7):58-65.
Niu Junchuan, Zhang Fuliang. Design and stiffness analysis of three-dimensional (3-PRRP~(4R)) parallel vibration reduction mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(7): 58-65. (in Chinese with English abstract)
[10] Gosselin C, Laliberté T, Veillette A. Singularity-free kinematically redundant planar parallel mechanisms with unlimited rotational capability[J]. Robotics, IEEE Transactions on, 2015, 31(2): 457-467.
[11] Wu J, Wang J, Li T, et al. Analysis and application of a 2-DOF planar parallel mechanism[J]. Journal of Mechanical Design, 2007, 129(4): 434-437.
[12] Huang T, Li Z, Li M, et al. Conceptual design and dimensional synthesis of a novel 2-DOF translational parallel robot for pick-and-place operations[J]. Journal of Mechanical Design, 2004, 126(3): 449-455.
[13] Liu X J, Wang J, Pritschow G. Kinematics, singularity and workspace of planar 5R symmetrical parallel mechanisms[J]. Mechanism and Machine Theory, 2006, 41(2): 145-169.
[14] 刘辛军,王立平,吴泽启,等. 基于力传递性能的平面并联机器人的优化设计[J]. 清华大学学报(自然科学版),2008,48(11):1927-1930.
Liu Xinjun, Wang Liping, Wu Zeqi, et al. Optimum design of a planar parallel robot based on force transmissibility[J]. Journal of Tsinghua University(Science and Technology), 2008, 48(11): 1927-1930. (in Chinese with English abstract)
[15] Gosselin C, Angeles J. The optimum kinematic design of a planar three-degree-of-freedom parallel manipulator[J]. Journal of Mechanisms, Transmissions, and Automation in Design, 1988, 110(1): 35-41.
[16] Xu B, Li T, Liu X, et al. Workspace analysis of the 4RRR planar parallel manipulator with actuation redundancy[J]. Tsinghua Science & Technology, 2010, 15(5): 509-516.
[17] Mousavi M A, Masouleh M T, Karimi A. On the maximal singularity-free ellipse of planar 3-RPR parallel mechanisms via convex optimization[J]. Robotics and Computer-Integrated Manufacturing, 2014, 30(2): 218-227.
[18] Hu J, Yan X, Ma J, et al. Dimensional synthesis and kinematics simulation of a high-speed plug seedling transplanting robot[J]. Computers & Electronics in Agriculture, 2014, 107(3): 64-72.
[19] 崔国华,张艳伟,张英爽,等. 六自由度串并联机械手的构型设计与运动学分析[J]. 农业工程学报,2010,26(1):155-159.
Cui Guohua, Zhang Yanwei, Zhang Yingshuang, et al. Configuration design and kinematic analysis of serial-parallel manipulator with six degrees of freedom[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(1): 155-159. (in Chinese with English abstract)
[20] Guo W J, Li R F, Cao C Q, et al. Kinematics analysis of a novel 5-DOF hybrid manipulator[J]. International Journal of Automation Technology, 2015, 9(6): 765-774.
[21] 刘前军,关立文,王立平. 一种混联机床运动学建模及研究[J]. 机床与液压,2007,35(10):64-66.
Liu Qianjun, Guan Liwen, Wang Liping. Kinematics model building and researching on a type of hybrid parallel machine tool[J]. Machine Tool and Hydraulics, 2007, 35(10): 64-66. (in Chinese with English abstract)
[22] Son S, Kim T, Sarma S E, et al. A hybrid 5-axis CNC milling machine[J]. Precision Engineering, 2009, 33(4): 430-446.
[23] Rosyid A, El-Khasawneh B, Alazzam A. Optimized planar 3PRR mechanism for 5 degrees-of-freedom hybrid kinematics manipulator[C]//ASME 2015 International Mechanical Engineering Congress and Exposition. American Society of Mechanical Engineers, 2015: V011T14A030-V011T14A030.
[24] Wu J, Chen X, Li T, et al. Optimal design of a 2-DOF parallel manipulator with actuation redundancy considering kinematics and natural frequency[J]. Robotics and Computer-Integrated Manufacturing, 2013, 29(1): 80-85.
[25] Pitt E B, Simaan N, Barth E J. An investigation of stiffness modulation limits in a pneumatically actuated parallel robot with actuation redundancy[C]//ASME/BATH 2015 Symposium on Fluid Power and Motion Control. American Society of Mechanical Engineers, 2015: V001T01A063- V001T01A063.
[26] ValÁšek M, Bauma V Á, Belda K, et al. Design-by- optimization and control of redundantly actuated parallel kinematics sliding star[J]. Multibody System Dynamics, 2005, 14(3/4): 251-267.
[27] Liang D, Song Y, Sun T, et al. Optimum design of a novel redundantly actuated parallel manipulator with multiple actuation modes for high kinematic and dynamic performance[J]. Nonlinear Dynamics, 2016, 83(1/2): 631-658.
[28] Harada T, Nagase M. Impedance control of a redundantly actuated 3-DOF planar parallel link mechanism using direct drive linear motors[C]//Robotics and Biomimetics (ROBIO), 2010 IEEE International Conference on. IEEE, 2010: 501-506.
[29] Jiang Y, Li T, Wang L. Dynamic modeling and redundant force optimization of a 2-DOF parallel kinematic machine with kinematic redundancy[J]. Robotics and Computer Integrated Manufacturing, 2015, 32: 1-10.
[30] Isaksson M, Gosselin C, Marlow K. An introduction to utilising the redundancy of a kinematically redundant parallel manipulator to operate a gripper[J]. Mechanism and Machine Theory, 2016, 101: 50-59.
Optimal design and kinematics analysis of 5-DOF hybrid serial-parallel manipulator
Zhang Dongsheng1, Xu Yundou1,2, Hou Zhaowei1, Yao Jiantao1,2, Zhao Yongsheng1,2※
(1066004; 2,066004)
In recent years, with the development of various types of intelligent robots, new agricultural robots have become frontier technology in the field of international agricultural machinery. And as the complexity and diversity of the agricultural production and operation, the characteristics of advancement and practicability are needed to add to the agricultural robots. In this paper, in order to increase the automation level of agricultural operations and improve the ability of adapting to different working environments, a novel kinematically redundant planar parallel mechanism (PM) with continuous rotational axis and fewer joints is proposed, which has one rotational degree of freedom (DOF) and 2 translational DOFs (2T1R). For the rotational DOF, the rotational axes of the moving platform are mutually parallel at any position of the whole workspace; for the translational DOFs, the directions are simple horizontal and vertical. This robot has a quite simple structure. As we all know, simple structures of the robot can reduce the manufacturing cost to a great extent. This kinematically redundant planar PM is a metamorphic mechanism. For instant, when the moving platform and the intermediate link are locked, the PM becomes an actuation redundant PM. So this PM can be used to research not only the kinematically redundant property but also the actuation redundant property. Actually, this new type PM can be used in the field of food packaging, seed selection, fruit classification, transport, picking, and so on. For the purpose of improving the robot properties, 15 5-DOF hybrid serial-parallel manipulators are constructed on the basis of this type of planar PM. One of these manipulators is selected to do some analysis in this paper, which is more likely to be applied in agriculture. Firstly, the kinematic model of the 5-DOF hybrid manipulator is established. Especially, the forward and inverse kinematics models show the briefness of this robot. What is worth mentioning is that a simple kinematics model is conducive to realize the control of the robot. And this matches the strategy of robot intelligence. The velocity Jacobian matrix is deduced, the singularity analysis of the PM is done according to the Jacobian matrix, and the conditions for reducing singularity are listed. The concept of singularity degree is defined, which can be used to keep away from mechanism singularity. Then based on the flexibility performance index, the optimal design of the 2T1R planar PM is investigated and the performance atlas is drawn. From the performance atlas, we can choose the physical dimensions of the PM. The 3-dimentional model based on a set of optimal physical dimensions is established. After that, in order to reduce weight without the loss of stiffness, the structural topology optimization is accomplished by means of the finite element software. The analysis and comparison of the whole structure are also carried out. This novel hybrid manipulator has the characteristics of simple structure, simple kinematic model, high stiffness, and high degree of modularity, which provides a very variety of application prospects in the field of agricultural machinery.
robots; design; optimization; planar parallel mechanism; kinematically redundant; degree of freedom; metamorphic mechanism
10.11975/j.issn.1002-6819.2016.24.009
TP242
A
1002-6819(2016)-24-0069-08
2016-05-12
2016-11-17
国家自然科学基金资助项目(51275439);河北省重点基础研究项目(15961805D);燕山大学青年教师自主研究计划课题资助项目(13LGA001);河北省研究生创新资助项目(2016SJBS001)
张东胜,男,博士,主要研究方向为并联机器人理论及其应用。秦皇岛 燕山大学河北省并联机器人与机电系统实验室,066004。 Email:ysuzds@163.com
赵永生,男,教授,博士生导师,主要研究方向为并联机器人理论及其应用。秦皇岛 燕山大学河北省并联机器人与机电系统实验室,066004。Email:yszhao@ysu.edu.cn
