基于实验室的ATO仿真系统设计与研究
2017-01-05张代胜郭宗昊陈荣武
张代胜,郭宗昊,陈荣武
(西南交通大学信息科学与技术学院,四川成都611756)
基于实验室的ATO仿真系统设计与研究
张代胜,郭宗昊,陈荣武
(西南交通大学信息科学与技术学院,四川成都611756)
列车自动运行(ATO)作为列车自动控制(ATC)系统中的重要组成部分,是提高列车运行水平的关键设备。基于西南交通大学城轨控制实验室地铁1号线,设计ATO仿真系统,能经济地、方便地模拟各种运行环境和列车控制功能。构建了ATO子系统的仿真框架结构,具体包括人机界面(MMI)显示、沙盘列车的控制和服务功能。采用自动驾驶和人工驾驶2种列车运行模式完成ATO仿真系统的设计。以Visual Studio2008软件为平台,利用C#语言开发了ATO仿真系统软件,实现了各功能模块。MMI与沙盘列车以串口通信的方式实现信息交互,司机通过对车载界面操作能够实现对沙盘列车的实时控制,同时列车状态信息能及时反馈至车载。通过ATO仿真系统的设计与实现,对实际列车运行控制技术的研究与开发具有一定的指导意义。
城市轨道交通;列车控制系统;列车自动运行;仿真系统;设计
0 引言
在城市轨道交通的发展过程中,人们不断探索提高列车运行安全程度、乘车舒适度和作业效率的方法。经过努力探索,人们研制出了通过计算机实现对列车运行实时控制的列车运行自动控制(ATC)系统,在很大程度上保证列车运行的安全性以及作业的高效率性。而列车自动运行(ATO)系统是 ATC 系统从根本上提高列车运行水平的关键技术设备[1],由于实际运营中的ATO 系统工作环境复杂,并且都具有作业量安排,不便用于理论研究和技术的研发。对于初期的理论研究,若采用现场测试,不仅周期长,而且投资大。更为重要的是,在现实环境中,有的极限条件难以创建,也难以遇到,这就导致了系统的某些性能难以测试,不能尽最大可能地保证行车运行安全[2]。因此,对仿真系统的设计研究很有必要性,根据需求设计并实现仿真系统,可以用于初期的理论研究,对现实环境进行模拟。可见,ATO 仿真系统的研究对实际 ATO 系统的开发不仅具有理论意义,而且具有实际意义。本文利用西南交通大学城轨控制实验室的硬件设备平台,设计并实现了 ATO 仿真系统,并且将 ATO 仿真系统应用到实验室列车模型的控制过程,可为 ATO 理论研究人员和 ATO 仿真系统开发人员提供一定的参考。
1 基于通信的列车控制(CBTC)系统框架概述
在城市轨道交通信号系统应用中,相对于先前普遍使用的基于轨道电路的列车控制系统,CBTC 系统采用了移动闭塞技术,并且能实现车地之间实时、可靠地传输大量的数据,缩短了列车的追踪间隔,提高了列车的运行效率,提高了列车准确定位的分辨率[3]。因此,在现今的各种城市轨道交通项目中,列车控制系统都普遍采用了 CBTC 系统。结合实验室的平台设计了CBTC 的系统结构,如图1所示。由图1可知,CBTC 系统的主要组成部分为:车载控制器(VOBC)、计算机联锁(CBI)系统、列车自动监控子系统(ATS)、区域控制器(ZC)、数据库存储单元(DSU)、数据通信系统(DCS)、人机接口(MMI)。其中,DCS包括骨干网、无线接入点(AP)、交换机和车载无线通信设备。
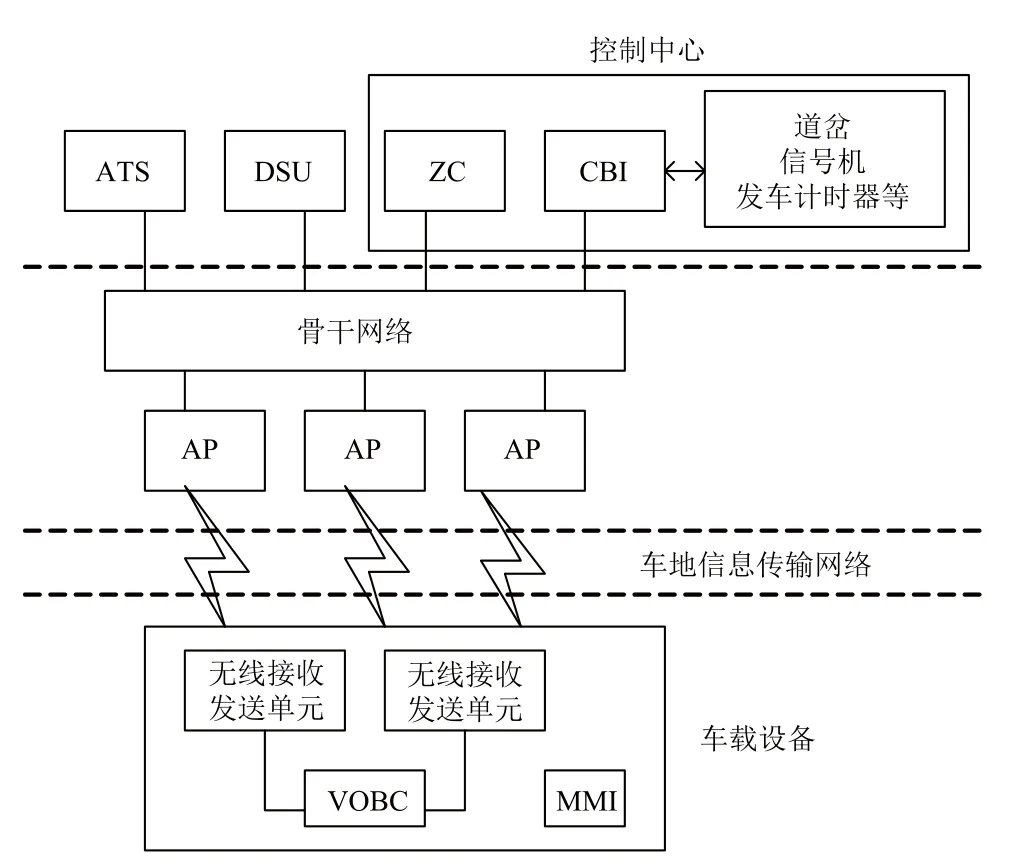
图1 CBTC系统结构图
2 ATO系统结构设计
2.1 框架设计
所设计的 ATO 仿真系统是在 CBTC 系统的背景下进行设计的,首先设计了 ATO 仿真系统的组成结构,如图2所示,其中 TWC 为车地通信。
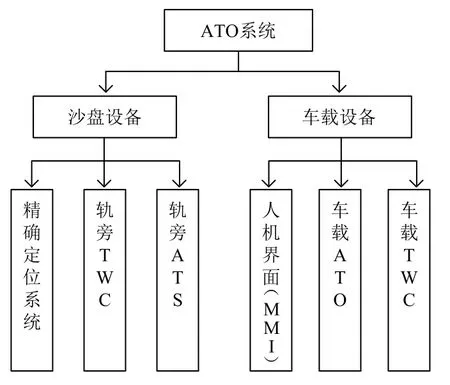
图2 ATO 仿真系统结构
2.1.1 ATO系统沙盘设备
(1)精确的定位系统利用城轨控制实验室已有设备,即线路上的射频 IC 卡,每张卡都有对应的卡号,由于卡号是在线路上连续铺排的,所以,可以对列车进行实时的定位。
(2)轨旁的车地通信(TWC)系统,则是由硬件电路、收发模块和天线组成的,通过 USB 串口连接在人机界面 PC 机上。
(3)地面的 ATS 系统,通过 ZC 与 ATO 系统间接相连。
2.1.2 ATO系统车载设备
(1)人机界面,采用 C# 语言在 Visual Studio2008(简称 VS2008)平台上开发,利用 VS2008的窗体对人机界面(MMI)进行设计。
(2)车载 ATO,利用程序模块去计算列车运行的命令速度。
(3)车载 TWC 则是将无线收发模块安装在车上,能周期性地接收和发送数据,TWC 同时还包括读卡模块,能周期性地读取列车所在的当前卡号,并将读取的卡号实时地传送给列车模型上的无线发送模块。
2.2 界面设计
为了能更好地体现 ATO 仿真系统的功能,模拟列车驾驶的速度控制,将列车驾驶室的人机界面设计到 PC机上面,并对其功能进行设计。
(1)司机操纵列车驾驶操纵面板(如牵引、惰行和制动功能按钮等),通过对它们的操作,转化为列车的控制命令,从而控制列车的驱动、制动及惰行等。
(2)模拟参数的输入,包括移动授权的模拟、串口号的选择以及串口工作的波特率选择等。
(3)列车运行的速度表盘,模拟列车速度的变化情况,显示出列车运行的实时速度。
(4)列车运行的进度条,仿真列车到目标点的距离的变化,实时地显示列车距离目标点距离的长度。
(5)数据采集模块,主要实现对列车返回的数据进行采集和显示。
(6)模拟曲线,模拟列车运行时 ATO 计算的命令速度曲线以及列车自动防护(ATP)程序模块计算出的列车常用制动触发曲线和紧急制动触发曲线。通过设计这些曲线,可以很好地对列车的运行速度进行防护,尤其是在 ATP 监护下的人工驾驶模式(即 SM 模式)时,它的仿真操作效果体现的更加明显。
(7)其他功能按钮,主要是通过按压这些按钮,实现对列车的不同控制以及实现对显示界面的不同处理,如操作模式选择按钮可以对列车的运行模式进行选择。
3 ATO 仿真系统功能设计
ATO 仿真系统的功能包括两大部分:列车的基本控制功能以及列车的服务功能。其中,基本控制功能由自动驾驶功能、车门开闭控制和自动折返组成;服务功能主要是对列车位置的确定、列车速度允许等[4]。
3.1 控车功能设计
3.1.1 列车自动驾驶
列车在自动驾驶(即 ATO 模式)的情况下,能对列车的运行速度做出自动调整。主要是对设计的列车控制程序模块,根据输入的移动授权距离,自动计算出加速段、减速段和匀速段的 ATO 命令速度曲线。按下列车的 ATO 模式按钮时,列车能按照命令速度曲线自动运行。设计的 ATO 模式仿真方式为:简化列车的运行过程,只绘制出列车的限速曲线,由程序模块自动地指示列车的仿真运行,而不绘制列车的命令速度曲线,示意图如图3所示。图3中,V限速表示列车运行时的 ATP 限速曲线,在AB段列车自动加速,当速度达到B点速度时,停止加速,保持匀速运行;在列车运行过程中,经过 ATO程序模块计算到目标点的距离,当速度保持到C点时,列车开始自动减速,直到到达目标点D时速度降为零,停止列车运行。

图3 ATO 运行模式过程示意图
3.1.2 ATP 防护下的人工驾驶
当列车处于 ATO 运行模式故障的情况下,需要利用其他的驾驶模式对列车进行驾驶操作。以设计 ATP 系统速度监护下的人工驾驶模式为例,阐述驾驶模式的设计过程。具体的操作示意图如图4所示。图4中A点表示列车的启动点,B、C、D、E和F点均为工况转换点,G点为停车点。具体转换过程:列车从A点开始以最大牵引力实现对列车的启动,当列车速度到达B点时,触到常用制动曲线,则列车开始制动,速度降到C点时,对列车施加牵引力,使列车速度加至D点时让列车惰行行驶,当速度将到E点时,再对列车进行牵引,当速度加至F点时,由于目标距离长度的限制,开始对列车制动,直到目标点停车。
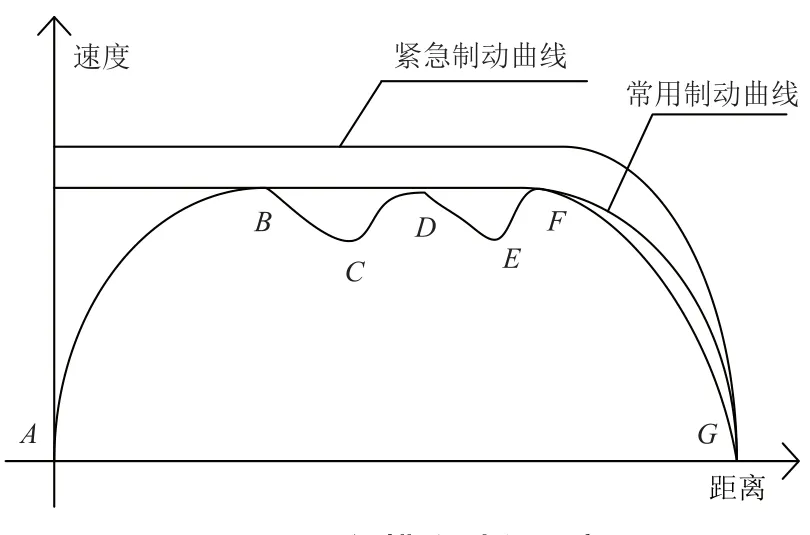
图4 SM 运行模式过程示意图
3.2 ATO 系统的服务功能设计
利用实验室的射频 IC 卡对列车进行定位,当列车上的读卡模块周期性地读取列车所在位置的当前卡号,并通过无线发送模块发送到无线网络中,然后通信机的无线接收模块将列车发送的位置和速度信息接收至 ATO仿真系统的 MMI 主机,再利用软件的数据显示功能,将接收到的列车信息显示出来,并且通过 Socket 实现数据的传递功能。利用串口调试助手软件模拟列车数据的周期性发送,然后通过对 MMI 的操作,实现数据的收发控制,最后通过网络将数据传送到接收终端,并实时地显示,完成列车的服务功能。
4 ATO系统功能实现
4.1 界面功能
界面功能主要是实现对列车的操纵以及列车运行情况的显示。本文中设计的人机界面是在阿尔卡特(Alcatel)公司的 MMI 的基础上,结合实际需求而设计出来的。利用 Visual Studio2008的窗体程序,对界面进行设计。界面布局设计如图5所示,包括列车运行的显示界面、列车的操作界面、模拟列车运行时所需要输入的仿真参数。
4.1.1 表盘
(1)实现原理。确定出表盘的最大速度刻度,确定为90 km/h,如图6所示。指针的旋转采取的实现方式为:保持指针在圆心的端点不改变,另一端点随着列车的速度变化而旋转相应的角度。要使指针旋转就必须使列车的运行速度与指针的旋转角度结合起来。

图5 MMI 界面
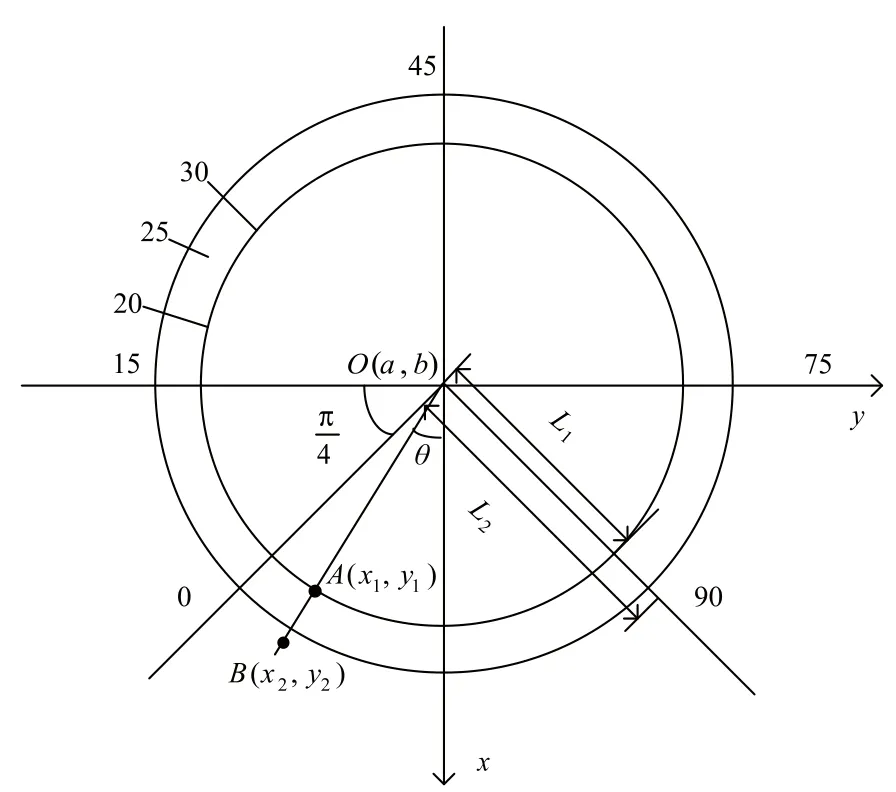
图6 MMI 表盘设计原理
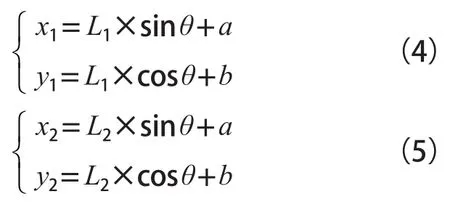
设指针长度为L1,固定端的端点坐标为(a,b),动态端点坐标设为(x,y),利用数学中的几何关系可以表示出动态端点坐标的表达式,如公式(1)和公式(2)所示。
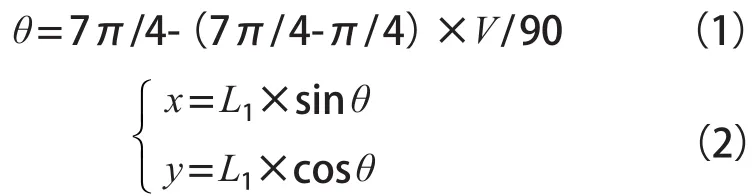
公式(1)、(2)中:V表示列车运行速度,km/h;θ为转动角度,rad;L1为表盘指针长度(像素);x为表盘指针动态端点的横坐标(像素);y为表盘指针动态端点的纵坐标(像素)。
(2)编程实现。由于软件中存在默认的坐标系,为了实现表盘指针的绘制,需要对公式(2)进行修正。修正后得到公式(3)。公式(3)中,减去的常量10是为了使表盘指针与表盘刻度分离;分别加上圆心的横纵坐标,是为了修正指针动态端点在窗体中的坐标。

利用几何关系,表示出图6中的A点和B点的坐标,分别如公式(4)和公式(5)所示。在确定好A点和B点的坐标后,就可以利用画线函数画出表盘的大刻度。同理可以确定小刻度的两端点坐标。
在确定好实现思路后,使用 C# 程序设计语言实现逻辑功能程序,实现流程图如图7所示。
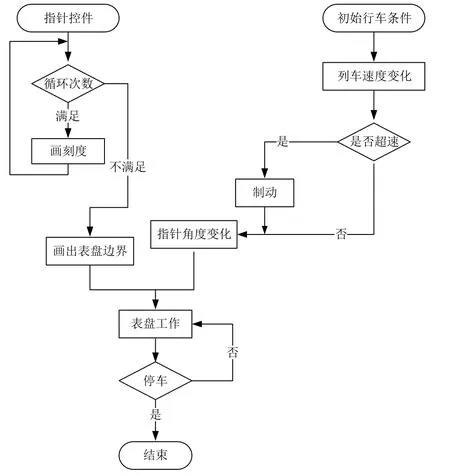
图7 表盘编程实现流程图
4.1.2 进度条
(1)实现原理。L为进度条可代表的实际距离,取值为1000m,X为整个进度条在窗体中的实际像素;S为当前的实际目标距离,H为列车当前的目标点距离所对应的进度条的像素长度,把当前像素H分成两部分,刻度0至1取为17像素,其余部分为h像素。在列车运行过程中,到目标点的距离不断变化,则进度条的上端点也随着变化,而下端点保持不变。设进度条的上端点坐标为(X1,Y1),由数学知识确定出进度条的上端点的动态表达式,当实际目标距离小于1时,进度条采取均匀变化的形式;当目标距离大于1时采用按取对数后的比例进行变化。分别如公式(6)和公式(7)所示。
公式(6)、公式(7)中:X0为初始刻度的右端点横坐标,单位为像素;Y2为进度条在窗体中的0刻度端的纵坐标,单位为像素;g取常数17,单位为像素;LMA为移动授权距离,m;dlts为列车的实际运行距离,m。
(2)编程实现。在确定好实现的算法原理后,编写程序,实现进度条的功能,程序流程图如图8所示。
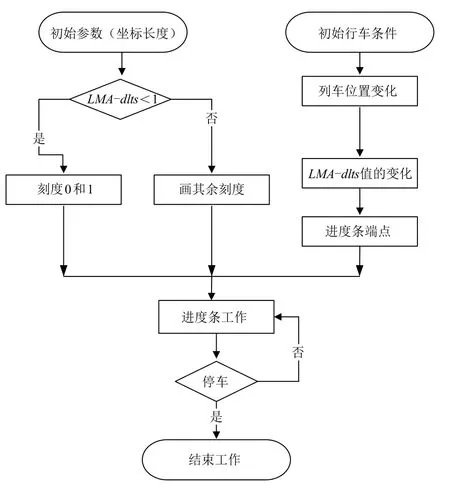
图8 进度条编程实现流程图
4.1.3 速度曲线
根据仿真参数的输入,计算出移动授权距离。对于ATO 运行模式,列车的 ATO 命令速度计算模块(程序块)计算出相应的命令速度曲线,列车自动按着曲线运行,根据限速条件和授权距离,自动对速度进行调整。对于 SM 运行模式,由 ATO 计算出命令速度曲线,由ATP 防护曲线计算模块计算出相应的防护速度曲线,司机参照算出的命令曲线行驶列车,实时画出列车的实际速度曲线,若司机操作过程中减速不当导致列车实际运行速度曲线达到常用制动曲线时,系统自动触发常用制动,进行减速;若减速制动力不足时,导致实际运行曲线超过了常用制动而触到紧急制动曲线时,自动实施紧急制动,直到列车速度为零。
4.2 控车功能实现
控车过程是基于城轨控制实验室已有的模型列车而设计程序模块的,通过软件、硬件和网络相结合,利用串口通信和无线网络通信的方式实现 MMI 对列车的控制操作。其控车实现过程如图9所示。通过对司机各操纵按钮设置相应的发送命令,当点击按钮时,发送相应的控车指令到通信机,即 VOBC 的一部分,通信机接收到此数据后,便自动地把该信息中转到无线网络中。然后,车上的无线接收模块周期性地从网络中读取数据,并将这些信息最终转为控制列车电动机的控制电平。由于不同的命令信息转换后的电平不同,电动机会处于不同的工作状态,进而表现出列车不同的运行状态。其中值得注意的是,为了提高仿真效果,应该根据上节中设计的列车速度,设计出各个速度段对列车的发送指令,从而使列车的运行状态在逻辑上与列车的运行速度相关联起来。
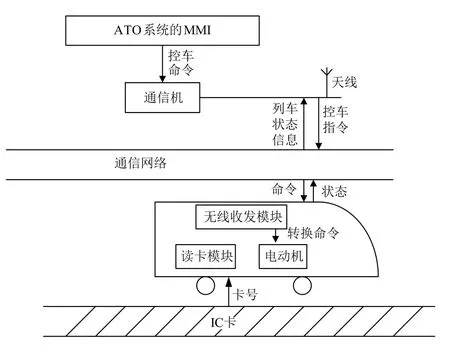
图9 控车实现示意图
4.3 服务功能实现
用C#语言编写Socket通信程序。先在客户端(MMI)编写用户端程序,主要实现方式是,编写用于存放各种方法的类,然后通过调用类的方法来实现与服务器端(接收终端)的连接。然后按照同样的方法编写服务器端的程序。程序实现过程如图10所示。
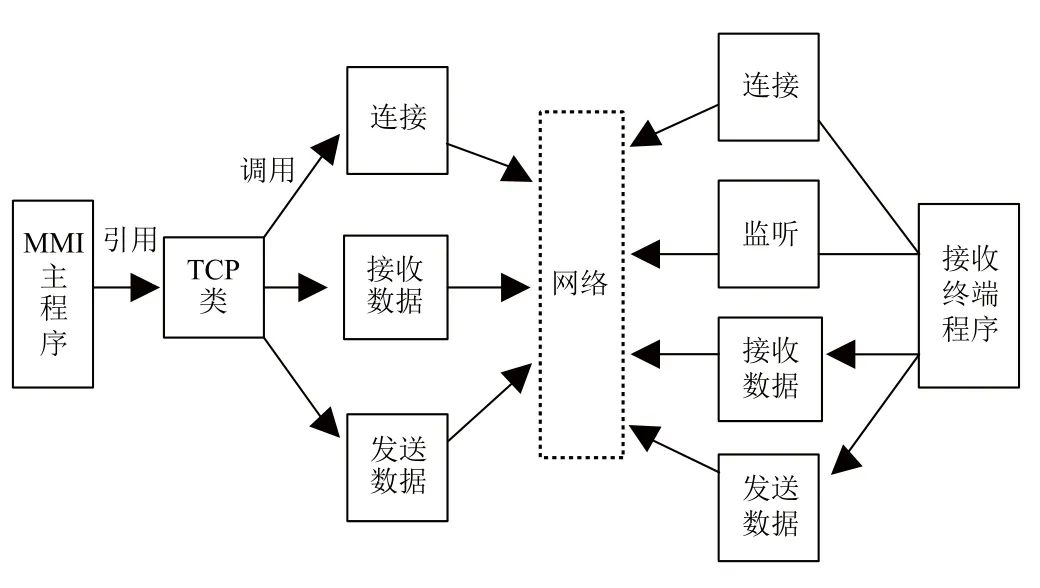
图10 服务功能实现程序结构
5 结论
本文利用 C# 语言开发了 ATO 仿真系统,参考阿尔卡特公司驾驶台司机显示器,设计并实现了用于体现ATO 仿真系统功能的 MMI,通过沙盘联合调试可以很好地实现 ATO 系统的调速功能、服务功能和控车功能。通过测试得出满足实时性、稳定性的要求。从而验证了该系统的实现方案可行性良好,对 ATO 仿真系统的开发具有一定的借鉴意义。但还有需要改进的地方,如测试多列车追踪功能时,当列车数量太多时,容易发生通信串扰。后续将从以下方面进行研究。
(1)改进点对点的通信方式,利用一对多的通信方式,实现多列车的追踪功能。
(2)结合实验的现有资源,通过编写接口程序将ATO仿真系统和三维视景仿真有机结合起来,实现对视景列车的调速控制功能。
[1] 陈荣武. CBTC系统列车运行仿真与优化策略[D]. 四川成都:西南交通大学,2011.
[2] 支柱. 城市轨道交通自动驾驶(ATO)测试系统中信号模拟的研究[D]. 北京:北京交通大学,2007.
[3] 徐金祥,冲蕾. 城市轨道交通信号基础[M]. 北京:中国铁道出版社,2010.
[4] 刘伯鸿,李国宁. 城市轨道交通信号[M]. 四川成都:西南交通大学出版社,2011.
[5] 张太花. ATS列车追踪的设计与实现[D]. 四川成都:西南交通大学,2013.
[6] 张玮,吴昕慧. 城市轨道交通列车运行控制系统维护[M]. 四川成都:西南交通大学出版社,2012.
[7] 万传军. 列车自动控制系统的设计与实现[J]. 西安石油学院学报:自然科学版,2003,18(3):69-72.
[8] 唐宁兴. CBTC车载控制器测试方法研究[D]. 北京:北京交通大学,2008.
[9] 梁晓钰. 城市轨道交通ATO测试系统设计与实现[D].北京:北京交通大学,2008.
[10] 俞国荣. CBTC系统无线通信子系统的设计[D]. 浙江杭州:浙江工业大学,2012.
[11] 邓子渊. 基于CBTC的ATP防护曲线仿真试验研究[D]. 甘肃兰州:兰州交通大学,2013.
责任编辑 冒一平
Design and Study of ATO Simulation System in Laboratory
Zhang Daisheng, Guo Zonghao, Chen Rongwu
ATO simulation system is designed based on the Metro Line1in the City Track Traffi c Management and Control Integration Laboratory of Southwest Jiaotong University. The simulation framework structure of ATO system includes manmachine interface (MMI) display, sand table train’s functions of control and service. The design of ATO simulation system is completed by using two kinds of train operation modes, which are automatic driving and manual driving. Using Visual Studio2008software as a platform, ATO simulation system software is developed by C# language, and the function modules are realized. MMI and sand table train by serial communication mode to realize the information interaction, through the vehicle driver interface can realize the real-time control of the sand table of the train, while the train status information can be timely feedback to the vehicle. Through the design and implementation of ATO simulation system, the research and development of the actual train operation control technology has certain guiding signifi cance.
urban rail transit, train control system, automatic train operation, simulation system, design
U231.7∶TP319
2016-07-20
四川省科技支撑计划项目(2014GZ0081)
张代胜(1991—),男,硕士研究生