获取摄像机安装高度及倾角的简易标定方法
2016-12-29朱秋煜赵保珠
朱秋煜,朱 鸣,赵保珠
(上海大学 通信与信息工程学院,上海 200444)
获取摄像机安装高度及倾角的简易标定方法
朱秋煜,朱 鸣,赵保珠
(上海大学 通信与信息工程学院,上海 200444)
提出了一种在摄像机内参数已知的情况下,通过地面上已知的4个及以上共面点求解出摄像机安装高度和安装倾角的标定方法。选定地面为X-O-Y面,则Z轴方向的平移因子即为摄像机的安装高度。方法借鉴了利用共面点进行标定的方法,在计算过程中利用投影矩阵元素间的比值关系,巧妙地消除了深度因子的影响,求解出了旋转角度和摄像机的安装高度,进而得到了摄像机的外参数矩阵。将多组实验计算出的安装高度结果和实际测量值相对比,得到的误差非常小,证明了该算法计算简便且具有较高的准确性。
相机标定;外参数;安装高度;安装倾角
摄像机标定技术是计算机视觉技术中的一个重要组成部分[1],被广泛应用于视频监控、三维重建、导航、人群定位与跟踪等重要领域。随着摄像机的广泛应用以及人工智能技术的不断发展,人们对摄像机的标定也越来越重视。摄像机标定主要获取摄像机的内外参数[2],内参数主要包括相机的焦距、主点的像素坐标、畸变等[3],外参数主要指用来描述相机坐标系和建立的世界坐标系间关系的平移矩阵和旋转矩阵。常用的标定方法,如张正友标定法[4]得到的摄像机外参数代表了相机安装的相对位置,得到的参数也只是矩阵形式。有时,由于世界坐标系选择以及标定环境的限制,摄像机的外参数有时并不能直接使用,如并行双目摄像机在用于行人计数等场合时通常还需要知道摄像机的安装高度、角度等。本文主要研究在摄像机内参数已知的基础上,利用地面上已知的4个及以上共面点标定点来获取摄像机安装高度以及倾斜角的方法,并据此得到摄像机外参数。
1 理论基础
1.1 摄像机外参数的物理意义
大家知道,摄像机的内参数只和摄像机有关,与安装的位置、周围环境无关,而摄像机的外参数和摄像机的安装位置、安装高度以及世界坐标系的选取有关。通常的标定方法不仅繁琐(如张氏标定法需要拍摄多幅不同角度的图像),而且只能得到矩形形式的外参。在有些情况下,需要在内参已知的情况下通过简易的方法获取摄像机的安装高度、安装角度等信息。如图1中,假定世界坐标系的原点和X-Y平面选择在地面,则世界坐标系和摄像机坐标系之间的平移向量中Z轴方向的平移因子即为摄像机的安装高度。图2中,给出了世界坐标系和摄像机坐标系之间的旋转关系,求出的3个旋转角度就分别对应于要求出的3个方向的倾角。

图1 世界坐标系和摄像机安装高度之间的关系
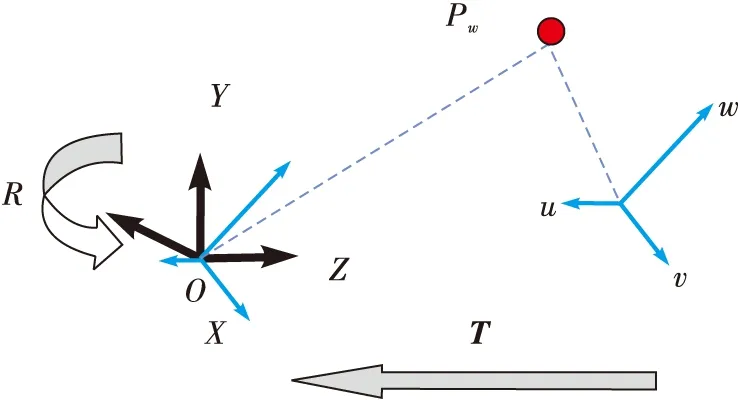
图2 世界坐标系和摄像机坐标系间的转换关系
摄像机世界坐标系和相机坐标系之间的转换关系为平移和旋转关系[5],表示为
PW=R(RC-C)=RPC+T
(1)
在齐次坐标下,通过变换,可以将式(1)写成如下形式
PW=MPC
(2)
其中:矩阵M的形式为
(3)
在三维空间中,从一个坐标系到另外一个坐标系之间的转换可以用坐标向量和一定尺寸的方阵的乘积表示。坐标系的旋转角度等同于将目标点围绕目标原点反方向旋转一定的角度。三维坐标之间的旋转可以分解为绕每一个坐标轴的二维旋转,并且其中旋转度量不变[6],若绕X、Y、Z轴的旋转角度分别α,β,θ,总的旋转矩阵R为在3个坐标轴的旋转矩阵RX(α),RY(β),RZ(θ),则整个旋转矩阵可以表示为3个矩阵的乘积。

图3 绕X轴旋转α角度
以绕X轴旋转为例,如图3所示,X轴不动,绕X轴旋转α角度,则旋转之后,空间中任一点(x,y,z)旋转之后的坐标(x′,y′,z′)可以表示为

(4)
也就是说绕X轴旋转的矩阵公式为
(5)
同理,可以得到绕着Y轴和Z轴旋转的矩阵Ry(β),Rz(θ),表示为
(6)
(7)
则,整个坐标轴的旋转矩阵为
R=Rz(θ)Ry(β)Rx(α)=

(8)
1.2 摄像机安装高度及角度的理论基础
在求解摄像机外参数时,借鉴了张氏标定法中的二维平面点成像理论。其中选取的特征点在同一个平面上,并将选取好的该平面作为世界坐标系的X-O-Y平面,则该平面所有特征点的三维坐标中Z值都为0。由摄像机针孔模型公式如下
(9)

(10)
即得到像素坐标系和世界坐标系之间的约束关系为
(11)
将式(11)表示为方程的形式为,即
(12)
矩阵H中有9个未知数,每一个特征点对应2个方程,也就是至少需要5个特征点才可以求解出H中的所有未知数,选择特定的比例因子,令h33=1,使用4个特征点来求解方程组。式(12)为
(13)
用矩阵形式表示为
(14)
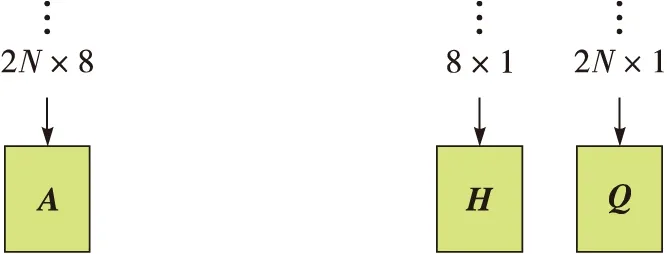
即求解矩阵方程
AH=Q
(15)
由于A不是方块矩阵,因而式(15)左右两边同时乘以AT,得(ATA)H=ATQ,最后求得矩阵H为
H=(ATA)-1(ATQ)
(16)

N=M-1H
(17)

(18)
解方程得
(19)
不难发现,只要选择地平面为X-O-Y轴,无论坐标原点在什么地方,摄像机坐标系的平移矩阵分量tz就是摄像机的高度。
2 实验结果及分析
图4是本次实验相机的安装位置示意图。图5中,白色圆圈所在的位置为实验中选用的4个特征点在视图中的位置,建立世界坐标系O-XYZ,笔者测量出这4个特征点和坐标系之间的距离,即得到它们的坐标位置。

图4 摄像机安装环境(照片)

图5 世界坐标系的建立
为了证明摄像机安装高度与原点选取无关,并且地面特征点有限,笔者在地面放置了一张正方形模板,利用模板中的点来计算。笔者做了5组试验,拍摄图像的大小为368×240,如图5所示,其中图5b白色标定板中每两个相邻黑点之间的距离经过测量为350 mm,建立合适的坐标系,即得到这些特征点在世界坐标系二中的坐标值。
采用的摄像机焦距为3.6 mm,主点坐标为图像的中心点(204,120)。第1组试验结果选取图5a场景中白色圆圈处的4个特征点,后4组实验选用图5b中特征点。得到的实验数据如表1所示。
由于第1组和后4组实验世界坐标系的原点不同,根据后4组实验结果求出3个方向的夹角,最后得到摄像机的旋转矩阵R和平移矢量T为

(20)

(21)
表1中,第1组选用的是图像中场景的地面角点坐标,后面4组都是选用的模板上的角度,虽然第1组和后面4组实验选用的坐标系不同,但其世界坐标系的选择都是在地面,因而获取的安装高度是一样的。从实验结果可以看出,由于实际地面角点坐标提取得不精确,得到的实验结果不如后4组实验。摄像机的安装高度经过测量大约在2.395m左右,和实际测量的安装高度相比,误差比较小,控制在1%以内。摄像机的安装角度,X轴旋转角度在100°左右,Y轴旋转角度很小,为0.1°左右,Z轴的旋转角度为70°左右。最后,根据求解出的安装角度和高度求解出了摄像机的旋转矩阵和平移矢量。

表1 摄像机安装高度及倾角的计算结果
3 结束语
本文提出了一种在摄像机内参数已知的情况下,通过地面上已知的4个及以上共面点求解出摄像机安装高度和安装倾角的标定方法。选用地面为XY坐标系所在的平面,利用共面点标定的方法,推导出摄像机安装高度和安装倾角的公式,进而求解出了摄像机的旋转矩阵和平移矩阵。将实验计算出的结果和实际测量值对比,得到的误差非常小。实验表明了该方法在求解摄像机安装高度以及安装倾角的可行性,且此方法计算简便并具有较高的准确性。
致谢:
论文成果要感谢王辉及邢羽锋在摄像机安装以及图像采集方面的帮助。
[1] FAUGERAS O D, TOSCANI G. Camera calibration for 3D computer vision[C]//Proc. International Workshop on Machine Vision and Machine Intelligence. Tokyo,Japan:IEEE, 1987,12(8):1741-1751.
[2] TSAI R. An efficient and accurate camera calibration technique for 3D machine vision[C]// Proc. Computer Vision and Pattern Recognition. Miami Beach,USA:[s.n.],1986:364-374.
[3] 王亮,吴福朝. 基于一维标定物的多摄像机标定[J]. 自动化学报,2007,33(3):225-231.
[4] ZHANG Z. Flexible camera calibration by viewing a plane from unknown orientations[C]//Proc. the 7th International Conference on Computer Vision. Corfu,Greece:[s.n.],1999:666-673.
[5] 马颂德,张正友. 计算机视觉:计算理论与算法基础[M]. 北京:科学出版社,1998.
[6] 于仕琪,刘瑞祯. 学习OpenCV[M].北京:清华大学出版社,2009.
朱秋煜(1964— ),研究员,主要研究方向为图像处理、计算机视觉、模式识别等;
朱 鸣(1993— ),硕士生,主研图像处理、计算机视觉、模式识别等;
赵保珠(1988— ),女,硕士生,主研图像处理、计算机视觉、模式识别等。
责任编辑:闫雯雯
Method of obtaining installation height and angle in camera calibration
ZHU Qiuyu,ZHU Ming,ZHAO Baozhu
(SchoolofCommunicationandInformationEngineering,ShanghaiUniversity,Shanghai200444,China)
Under the condition of known intrinsic parameters, the paper presents a calibration approach of getting the installed height and the angle of the cameras through 4 or more known coplanar points on the ground. If the ground is chosen as the X-O-Y plane, the translation factor on Z-axis direction is the installed height of the camera. This method references the calibration method of using the coplanar points in the same plane, by using the ratio relationship between elements of the projection matrix, it cleverly eliminates the influence of the depth factor and works out the installed height and the angles of rotation of the camera, by which extrinsic parameter matrices of the cameras can be obtained.Compared with the actual value of the installation height,the results of the several experiments shows that the deviation is very small,which proves the method has the simplicity of computation and high accuracy.
camera calibration; extrinsic parameter; installation height; installation angle
朱秋煜,朱鸣,赵保珠. 获取摄像机安装高度及倾角的简易标定方法[J].电视技术,2016,40(12):143-147. ZHU Q Y,ZHU M,ZHAO B Z. Method of obtaining installation height and angle in camera calibration [J]. Video engineering,2016,40(12):143-147.
TP391.41
A
10.16280/j.videoe.2016.12.026
2016-03-09
