一种长行程小型化对接机构设计与分析
2016-12-24李隆球邵广斌周德开刘伟民王敬轩
李隆球,邵广斌,周德开,刘伟民,王敬轩
(1.哈尔滨工业大学机电工程学院,哈尔滨150001;2.哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150001)
一种长行程小型化对接机构设计与分析
李隆球1,2,邵广斌1,周德开1,刘伟民1,王敬轩1
(1.哈尔滨工业大学机电工程学院,哈尔滨150001;2.哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150001)
针对故障航天器和太空垃圾的在线对接与操作问题,基于非合作目标对接技术的要求和特点,提出了一种以卫星远地点发动机喷管为对接接口的长行程小型化的对接机构方案。设计了对接机构的具体结构并建立其三维模型,并根据此模型,对对接机构的包络范围进行了求解分析;使用ADAMS软件对机构进行了动力学仿真,研究了对接过程中目标喷管的运动学特性,分析了末端机构与目标的碰撞接触情况及机械臂中各关节受力情况。计算与仿真结果表明:所提对接机构能够对目标进行有效、可靠的对接。
长行程小型化;非合作目标;对接机构
1 引言
空间交会对接技术指使两个航天器在空间轨道上对接合并,在结构上成为一个整体的技术[1],具有重要的空间应用价值和前景,美国、欧洲、日本等已对空间自主交会对接、空间机器人等非合作目标对接的前期基础技术进行了大量研究,完成了大量的空间演示和试验,取得了一定成就。德国航天局开展的以在轨维修及装配为目的的TECSAS/DEOS研究计划[2]、美国以目标卫星轨道操作为目标的FREND项目[3⁃5]以及在此基础上开展的“凤凰计划”[6⁃7]都是非合作目标对接技术研究的先行代表。国内哈尔滨工业大学的张广玉等以地球同步轨道卫星为对接捕获目标设计了一系列三臂型对接机构[8⁃12],采用包络捕获的原理,使用圆周上120°均匀分布的三组机械臂作为执行机构完成对卫星远地点发动机喷管的对接抓捕。包络捕获方案科学,机构简单,驱动元件少,有很高的研究与应用价值,但机构尺寸与质量较大,若进行空间应用发射成本较高。
本文设计了一种以地球同步轨道卫星为抓捕对象的长行程、小型化非合作目标对接机构,该机构具有捕获范围大、可靠性高、适应性强、定位精准等特点。
2 对接机构捕获原理及方案
本设计中,目标航天器选择为地球同步轨道卫星,该类卫星种类齐全,数量众多,研究也最具代表性。卫星上都安装有远地点发动机,本设计即以远地点发动机喷管[13⁃15]作为对接接口进行对接机构的设计。该喷管及简化模型如图1、图2所示。简化后的喷管尺寸如表1所示。

图1 卫星远地点发动机喷管图[14]Fig.1 The apogee kick engine nozzle of target GEO satellite[14]

图2 简化后的喷管Fig.2 Simplified nozzle model

表1 喷管尺寸参数表Table 1 Engine nozzle dimension
考虑工程实际,以及对接任务的非合作性,对接机构需要具有小型化、长行程的特点。对接机构小型化将降低对其本体卫星的要求,也会降低对接机构及本体卫星的发射成本;对接机构长行程用以提升距离,进而消除本体卫星与目标喷管的轴向距离,且能为空间相机的视距提供良好保障。
2.1 对接机构原理
根据对接机构长行程、小型化特点,经过对设计要求以及抓捕目标等因素的综合分析,采用机械臂包络捕获的方式完成对接捕获,并使用多级丝杠实现抓捕机构的长行程移动。对接原理如图3。在发现目标后,先由搭载对接机构的本体卫星与目标逐渐靠近并稳定在对接初始条件要求内,完成空间交会。抓捕机构采用平行四杆机构,该机构的铰链安装有扭簧,扭簧有一定的预载荷,预载荷能够使平行四杆机构向外张开。滚子安装在抓捕机构的机架上,与丝杠的相对位置保持不变。执行机构运动的初始阶段,由于平行四杆机构特性,在滚子支撑与弹簧预载荷的综合作用下,螺母的上升只能使四杆机构向上移动。螺母继续上升,当铰链逐渐上升至脱离滚子的支撑时,四杆机构将在扭簧的作用力下向外张开,形成一个使喷管进入的包络空间,同时抓捕机构在多级丝杠机构驱动下靠近目标卫星的远地点发动机喷管直至喷管进入抓捕机构的包络范围;然后机械臂收拢,包络空间收缩,将喷管前端锁定在包络空间内并锁紧固定,实现目标航天器与本体航天器的对接;为方便抓捕完成后本体航天器对目标航天器的进一步动作,多级丝杠收回以拉动抓捕机构并带动喷管和目标航天器靠近本体航天器;操作完成后,执行机构打开,弹出机构将喷管弹出。
2.2 对接机构总体方案
根据包络捕获原理以及对接过程流程,细化各功能结构,完成机构设计。对接机构总体方案如图4所示。对接机构包含四大功能机构:提升机构、执行机构、缓冲机构、弹出机构。
提升机构:目标航天器与本体航天器在对接开始前有500 mm的轴向距离,提升机构负责将抓捕机构提升500 mm行程以靠近目标航天器喷管。
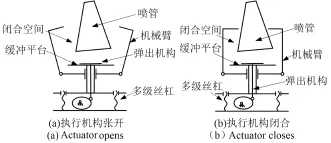
图3 对接机构原理图Fig.3 Principle diagram of the docking mechanism

图4 对接机构总体方案Fig.4 Overall structure of the docking mechanism
执行机构:执行机构负责完成对目标的抓捕、锁紧等动作。执行机构的末端应保证形成的包络空间有效可靠,防止抓捕目标发生逃逸。
缓冲机构:为避免对接过程中碰撞接触力过大造成机构破坏,缓冲机构应有效缓冲对接机构与喷管之间的冲击碰撞。
弹出机构:弹出机构负责将已抓捕的目标喷管弹出,使其与本体航天器有一定的分离速度。分离速度应大小适中,同时,分离角速度也应控制在合理范围内。
此外,对接机构还需传动系统及机架完成传动和支撑等功能。传动系统的驱动数量要尽可能减少,传动部件的传递效率应尽可能高,以提高系统的可靠性与传动效率。机架负责支撑整个系统,作为抓捕机构的载体,应保证支撑强度与刚度。
最终设计的对接机构直径350 mm,高度345 mm,质量23 kg,轴向提升行程可达500 mm,机械臂张开后末端机构形成的圆直径超过220 mm,可容纳喷管同时有50 mm的径向偏差以及10°的角度偏差。
3 对接机构的运动学分析
3.1 机械臂的运动轨迹求解
执行机构的机械臂为平行四杆机构。其特点是相对两杆相互平行且以相同角速度同时转动,连杆做平行移动。根据对对接机构的分析,机械臂能够顺利张开与闭合、成功完成抓捕动作,依赖于安装在铰链处的扭簧以及在各自方向上提供平动与旋转支撑的滚子的共同作用,二者决定了机构能否正常工作[16]。定义X轴为平行于机械臂的横向对称轴,X轴、Y轴、Z轴方向符合右手坐标系法,机械臂的运动简图如图5所示。
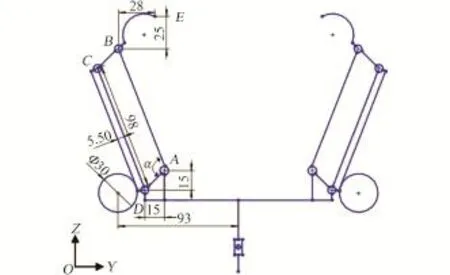
图5 机械臂运动学简图Fig.5 Schematic diagram of the docking mechanism
A处的铰链安装有扭簧,扭簧有一定的预载荷,预载荷能够使平行四杆机构向外张开。滚子安装在抓捕机构的机架上,与丝杠的相对位置保持不变。执行机构运动的初始阶段,由于平行四杆机构特性,在滚子支撑与弹簧预载荷的综合作用下,螺母的上升只能使四杆机构向上移动。螺母继续上升,当D处铰链逐渐上升至脱离滚子的支撑时,四杆机构将在扭簧的作用力下向外张开,形成一个使喷管进入的包络空间。
在抓捕过程中,机械臂打开,根据其运动约束关系及结构形式,假设直线CD表达式为式(1):

式中k为直线斜率,b为直线在y轴截距。
以对接机构底面中心为坐标原点,滚子轴心O(m,n)为(-93,780)与直线 CD距离为d=20.5 mm。由于机构运动的确定性,以及机械臂收回时间的不确定性,在最高点位置,即多级丝杠完成500 mm行程的伸展后,执行机构所在位置上末端机构在机械臂张开过程中的运动轨迹,与机械臂在闭合收回过程中的运动轨迹相同。因此,可以求解张开过程中的末端机构运动轨迹作为替代,以D点与滚子轴心位置水平时为时间起点。D点坐标为(xD,yD),根据D点在直线CD上可得式(2)所示方程组:

此时末端机构上E(xE,yE)点的位置如式(3):

式中:v为螺母的提升速度(mm/s),t2——时间,以A点与O点水平为时间起点(s)。
通过计算得出的末端机构轨迹散点,可做出坐标值随时间变化的曲线如图6所示。
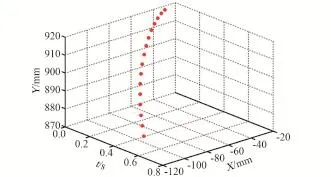
图6 抓捕过程中末端机构的轨迹曲线Fig.6 Trajectory of the tip mechanism
对于执行机构机械臂,其张开特性对抓捕过程并不重要,重要的是其闭合收回的急回特性及轨迹的确定性。从末端机构的轨迹散点结果及轨迹图可以看出,机械臂的收回非常迅速,不到1 s,即可从张开状态完全收合,使喷管不能逃脱。
3.2 机械臂与缓冲机构联合工作空间求解
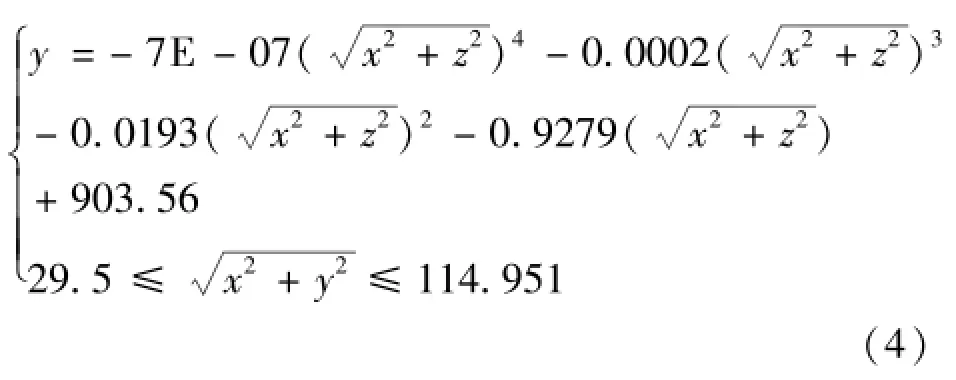
机械臂的工作空间是末端机构能到达的点的集合,是机械臂的活动范围。求解机械臂与缓冲机构联合围成的工作空间,能保证目标喷管顺利进入机械臂包络的范围,对于成功完成抓捕对接非常重要。因此需要通过确定机械臂的工作空间来设计机械臂整体的结构尺寸,以保证机构的合理性。由机械臂在圆周上以120°均匀分布,可以确定三个机械臂围成的工作空间,根据误差最小原则进行拟合,并以y轴为中心轴,旋转一周得式(4):
缓冲机构是由弹簧支撑的平面,半径大小为45 mm,行程为5 mm,故其运动轨迹为一圆柱体,其表达式如式(5):

根据初始对接条件及对接原理,喷管最大径向偏差为50 mm左右、最大角度偏差为10°左右时,机械臂能成功抓捕目标所需要的空间范围及本设计可提供的工作空间范围如表2所示。
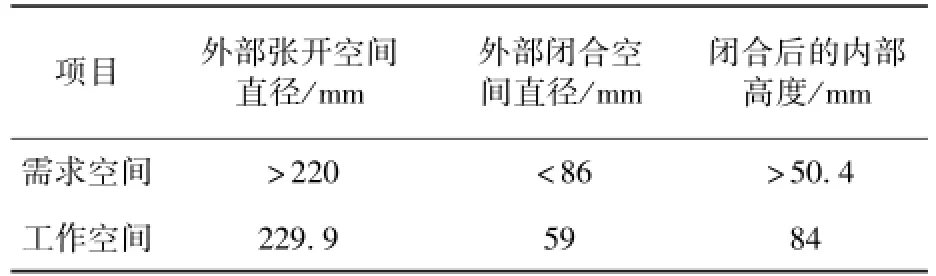
表2 工作空间对比Table 2 Comparison of work space
由表2可以看出,三个机械臂张开时,围成的空间直径D为229.9 mm,而目标卫星上喷管相对于本体卫星的最大位置偏差S为50 mm,最大角度偏差为10°,喷管直径d为86 mm,因此最大位置范围直径约为220 mm。机械臂在收合状态下形成的包络圆周大小为59 mm,大于喷管小径32.4 mm,小于喷管大径86 mm,可知末端机构的包络圆能将喷管大径包罗其中,完成抓捕。通过对比需求空间与工作空间,以看出三个机械臂与缓冲机构联合围成的空间可以满足需要。工作空间可使所有喷管顺利进入机械臂与缓冲平台形成的包络空间内,机械臂可将喷管成功包络捕获。
4 对接机构动力学分析
根据运动学与动力学定义,将各构件简化为刚体,使用Solidworks进行3D建模,简化后导入ADAMS,模型如图7所示。
通过对驱动的设置进行仿真过程的时间控制,仿真时长为69 s,步数为2000步,初始对接条件为:轴向距离500 mm,径向距离20 mm,俯仰角偏航角均为0°。
对接过程具体时间设置:0~15 s,丝杠螺母机构驱动机械臂张开;0~20 s,多级丝杠与套筒运动,提升机构伸出;20~25 s,机械臂收回,将目标喷管包络并压紧;40~45 s,多级丝杠反向运动,将执行机构与目标喷管收回500 mm;45~50 s,停止运动,等待下一步动作;50~53 s,机械臂提升5 mm,缓冲机构升起,解除对喷管的压紧;53~55 s,等待喷管稳定;55~58 s,机械臂张开,保证喷管能够从包络空间内弹出;58~64 s,凸轮转动,弹出机构将喷管与目标航天器弹出;64~69 s,机械臂收回,完成动作。
4.1 目标喷管位姿变化情况分析
定义X轴为平行于航天器的横向对称轴,X轴、Y轴、Z轴方向符合右手坐标系法。图8(a)为喷管在X、Z两个径向分量方向上的位移随时间的变化曲线,在X向的初始位移是20 mm,Z向的初始位移为0。在第21 s时,机械臂收合,与目标喷管发生碰撞接触,此时径向位移会有比较大的波动;但是经过机械臂的拉回与压紧动作,目标喷管在第25 s之后,径向位移由于末端机构的校正作用最终消除;55~58 s过程中,喷管由于失去机械臂的压紧而以自由状态运动;至60 s,喷管被弹出后在径向上远离对接机构。图8(b)为目标喷管的轴向位移,以初始位置为零点,喷管在21 s时开始在末端机构的拖拉作用下逐渐靠近对接机构底座,在45 s时轴向位移达到最大,之后为机械臂上升及保持阶段,喷管在缓冲机构弹簧的作用下逐渐上升,在60 s左右时被弹出机构弹开。

图8 目标位移曲线图Fig.8 Time⁃displacement chart of the target
根据仿真计算结果,绘制喷管沿各轴方向的速度曲线如图9所示。
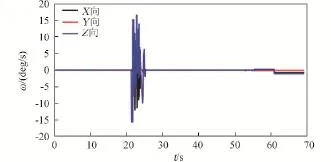
图9 目标速度曲线图Fig.9 Velocity chart of the target in each axis
目标喷管沿各轴的初始速度均为0,在21 s时与末端机构产生碰撞接触,产生较大的速度波动,最大瞬时速度达到270 mm/s左右。在25 s时,机械臂完成对喷管的压紧,使喷管沿各轴的速度基本稳定为0。25~45 s,喷管在机械臂的拖拉作用下靠近对接机构底座,速度由电机及多级丝杠机构控制。在喷管被压紧过程中,速度依然有较小范围的波动,主要是由于喷管被末端机构与缓冲机构紧压在中间,而缓冲机构与抓捕机构之间有间隙存在,此间隙给了两机构之间的弹簧一定的行程。60 s时,分离过程中弹出机构的弹出架使喷管及目标卫星获得了一定的沿某个方向的释放初速度。最终在此仿真条件下,径向释放速度约为7.42 mm/s,轴向释放速度约为45 mm/s。通过以上仿真分析可知,分离过程中,弹出机构和目标卫星具有一定的相对速度,不会发生碰撞。
实际上由于释放时喷管沿各轴有转速,会造成释放完成后喷管沿各方向的速度发生变化。故喷管释放速度是实际应用中需重点考量的指标。
4.2 碰撞接触力分析
对对接过程分析可知,抓捕过程中,末端机构与目标喷管碰撞时会产生较大的碰撞接触力,可能会造成机构与喷管的破坏,因此对末端机构与喷管碰撞接触力的研究至关重要。根据仿真计算结果,末端机构1、2、3与喷管的碰撞力曲线如图10所示。末端1、2、3分别为三组机械臂执行机构上的末端机构。
图中三个末端与喷管的接触力的变化时间及最大接触力稍有不同,是由于初始条件下喷管与对接机构约有20 mm的径向偏差,喷管首先与末端1发生接触碰撞,被弹开后与末端2和末端3发生碰撞,反复发生弹开与碰撞,因此接触力曲线前端波动较为剧烈;末端相互交叉的形状也会对碰撞形式产生影响。21 s时,喷管与末端发生接触碰撞,碰撞接触力有较大的波动,此时最大碰撞接触力约380 N,发生在喷管与末端2之间;21~25 s之间,机械臂带动末端将喷管逐渐压紧在缓冲平台上;至25 s,喷管与对接机构基本保持相对稳定状态,接触力基本保持不变,接触力约为250 N。由于完成压紧后缓冲平台与抓捕机构之间的空隙不能完全消除,因此此时接触力大小主要与缓冲机构中的弹簧力有关;从50 s开始,逐渐解除对喷管的压紧后,末端与喷管的接触力逐渐下降为零。通过以上仿真分析可知,喷管与对接机构有一定接触力,但在可控范围内,且解除压紧后会逐渐下降为零,不会损伤喷管及对接机构。
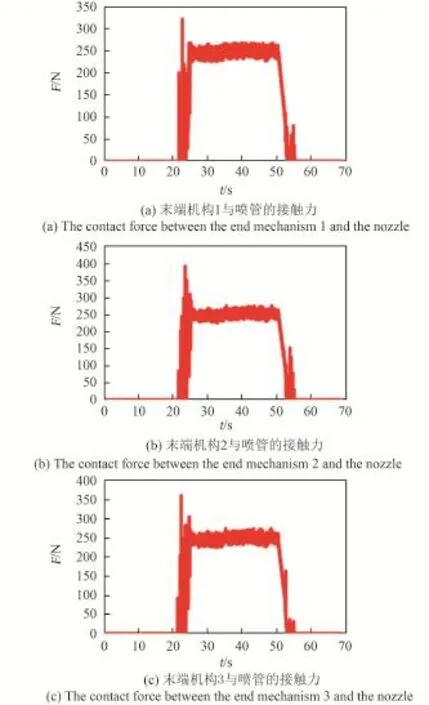
图10 末端与喷管的接触力Fig.10 Contact force between the end mechanism and the nozzle
4.3 各关节受力分析
机械臂是执行机构乃至整个对接机构的关键组成部分,而其关节处也是整个机构的主要受力点。关节力如图11所示。图11(a)、(b)、(c)、(d)分别表示图3中B、C、A、D四处的关节的受力随时间的变化情况。
由图11可知,四处关节的受力情况略有不同,但总体来看相差不大,这也很容易通过对平行四杆机构的受力分析得知。在前21 s,各关节处受力较小且有小幅波动,主要是由于在A处安装有扭簧,且扭簧有2 N·mm的预载荷使机械臂压缩滚子,机械臂的上升与滚子的旋转会使扭簧力产生轻微振荡,从而使机械臂对滚子的压力以及关节力产生轻微振荡,在机械臂开始打开的过程中,扭簧力会逐渐变小而使关节受力变小。21 s左右时,末端机构与喷管的碰撞接触会使机械臂关节力产生较大波动,其变化规律和末端与喷管的接触力变化规律基本相同,力的大小会有不同。开始阶段的碰撞伴随着末端机构对喷管的压紧而结束,此时关节受力的大幅值跳动也会结束,在末端机构对喷管完全压紧的时间内,关节力保持在相对稳定的范围内。机械臂抬起时末端机构与喷管接触力逐渐减小,关节力也逐渐减小,恢复到与末端未接触喷管时的受力状态。根据仿真结果,关节处所受最大力约为23 s时的冲击力,约为1190 N,喷管被压紧时受力约为800 N。通过以上仿真分析得知,机械臂中各铰链受到一定的关节力,但在可控范围内,且会在解除压紧时逐渐减小并恢复到最初受力状态。因此,机械臂强度能够达到要求。

图11 机械臂中各铰链处关节受力曲线Fig.11 Force curve in various joints
5 结论
1)设计了一种满足长行程、小型化要求的非合作目标对接机构,该机构能够实现500 mm的提升距离,能对现有研究的同步卫星喷管进行有效捕获,由执行机构与缓冲机构联合构成的工作空间最大直径为229.9 mm,最小直径为59 mm。
2)所设计的对接机构进行目标抓捕时,末端机构与目标喷管进行接触时,目标会出现振动,并且产生较大的接触力,对接机构各关节的受力在安全范围之内,对接机构能够很好地完成对非合作目标的捕获和分离。
(
)
[1]林来兴.自主空间交会对接技术进展[J].载人航天,2005,11(4):15⁃19.Lin Laixin.Development of autonomous rendezvous and doc⁃king technology[J].Manned Spaceflight,2005,11(4):15⁃19.(in Chinese)
[2]余江华.非合作航天器相对位姿测量方法研究[D].哈尔滨:哈尔滨工业大学,2013.Yu Jianghua.Research on Relative Position Measurement of Non⁃cooperative spacecraft[D].Harbin:Harbin Institute of Technology.2013.(in Chinese)
[3]Martin E,Dupuis E,Piedboeuf J C,et al.The TECSAS mis⁃sion from a Canadian perspective[C]//Proc.8thInternational Symposium on Artificial Intelligence and Robotics and Auto⁃mation in Space(i⁃SAIRAS),Munich,Germany.2005.
[4]Iannotta B.Sumo wrestles satellites into new orbits[J].Aero⁃space America,2006,44(2):26⁃30.
[5]Debus T J,Dougherty S P.Overview and performance of the front⁃end robotics enabling near⁃term demonstration(FREND)robotic arm[C]//Proceedings of the 2009 AIAA Infotech@ AerospaceConference.Seattle, Washington,USA:AIAA.2009.
[6]梁斌,杜晓东,李成,等.空间机器人非合作航天器在轨服务研究进展[J].机器人,2012,34(2):242⁃256.Liang Bin,Du Xiaodong,Li Cheng,et al.Advances in space robot on⁃orbit servicing for non⁃cooperative spacecraft[J].Robot,2012,34(2):242⁃256.(in Chinese)
[7]陈罗婧,郝金华,袁春柱,等.“凤凰”计划关键技术及其启示[J].航天器工程,2013,22(5):119⁃128.Chen Luojing,Hao Jinhua,Yuan Chunzhu,et al.Key tech⁃nology analysis and enlightenment of phoenix program[J].Spacecraft Engingering,2013,22(5):119⁃128.(in Chi⁃nese)
[8]范佐.非合作目标对接机构的研究[D].哈尔滨:哈尔滨工业大学,2007.Fan Zuo.The Research on Uncooperative Target Docking Mechanism[D].Harbin:Harbin Institute of Technology.2007.(in Chinese)
[9]丰飞.非合作目标欠驱动对接捕获机构的设计与研究[D].哈尔滨:哈尔滨工业大学,2008.Feng Fei.Dedign and Research on the Docking and Underac⁃tuated Capturing Mechanism for the Uncooperative Target Sat⁃ellites[D].Harbin:Harbin Institute of Technology.2008.(in Chinese)
[10]刘传世.空间非合作目标对接机构的研究[D].哈尔滨:哈尔滨工业大学,2010.Liu Chuanshi.Study on the Docking Mechanism for Uncoop⁃erative Space Target[D].Harbin:Harbin Institute of Tech⁃nology.2008.(in Chinese)
[11]李隆球,张广玉,柏合民,等.非合作目标卫星三臂型对接机构及其力学分析[J].上海航天,2015,32(1):5⁃11.Li Longqiu,Zhang Guangyu,Bai Hemin.et al.Design and Mechanical Analysis for a Three⁃arm Non⁃cooperative Target Satellite Docking Mechanism[J].Aerospace Shanghai,2015,32(1):5⁃11.(in Chinese)
[12]庞新源.非合作目标识别及多功能捕获机构的研究[D].哈尔滨:哈尔滨工业大学,2014.Pang Xinyuan.Research of Non⁃cooperative Identification and Multifunctional Docking Mechanism[D].Harbin:Harbin In⁃stitute of Technology.2008.(in Chinese)
[13]Caswell D,Visentin G,Ortega G,et al.ConeXpress Orbital Life Extension Vehicle-a commercial service for communica⁃tions satellites[J].ESA bulletin,2006,127(8):54⁃61.
[14]Korte J J.Flow quality of hypersonic wind⁃tunnel nozzles de⁃signed using computational fluid dynamics[J].Journal of Spacecraft and Rockets,1995,32(4):569⁃580.
[15]Hoffman J D.Design of compressed truncated perfect nozzles[J].Journal of Propulsion and Power,1987,3(2):150⁃156.
[16]张雪敏.非合作目标拖拉式对接机构的研制及实验研究[D].哈尔滨:哈尔滨工业大学,2013.Zhang Xuemin.Development and Experimental Study on the Tractive Docking Mechanism for the Uncooperative Target Sat⁃ellites[D].Harbin:Harbin Institute of Technology.2013.(in Chinese)

图8 驱动力矩仿真结果Fig.8 Simulation results of the actuator torque
4 结论
本文提出一种双四连杆串联式展收机构的设计方案,并利用ADAMS软件完成了展收机构优化设计,在满足四连杆机构压力角大于30°的约束前提下,当驱动曲柄(杆AB)与连杆(杆BC)达到死点位置时,防热罩从初始位置(0°)刚好转到180°。通过优化实现了防热罩展开180°时机构处于死点位置,具备断电保持能力,实现了优化设计目标;并获得大惯量下的展开过程驱动力曲线,驱动机构扭矩(含减速器)最大为32.3 N·m,为驱动组件的选型提供依据。
参考文献(References)
[1]李志杰,果琳丽,张柏楠,等.国外可重复使用载人飞船发展现状与关键技术研究[J].航天器工程,2016,25(2):106⁃112.Li Zhiguo,Guo Linli,Zhang Bainan,et al.Study on devel⁃opment status and key technologies of reusable manned space⁃ craft[J].Spacecraft Engineering,2016,25(2):106⁃112.(in Chinese)
[2]杨雷,张柏楠,郭斌,等.新一代多用途载人飞船概念研究[J].航空学报,2015,36(3):703⁃713.Yang Lei,Zhang Bainan,Guo Bin,et al.Concept definition of new⁃generation multi⁃purpose manned spacecraft[J].Jour⁃nal of Aeronautica,2015,36(3):703⁃713.(in Chinese)
[3]Lyons D T,Desai P N.Adventures in parallel processing:en⁃try,descent and landing simulation for the genesis and stard⁃ust missions[C]//AIAA/AAS AStrodynamics Specialist Con⁃ference;8⁃11 Aug.2005;Lake Tahoe,CA;United States.AAS⁃05⁃267.
[4]Desai P N,Cheatwood F M N.Entry dispersion analysis for the genesis sample return capsule[J].Journal of Spacecraft and Rockets,2001,38(3):345⁃350.
[5]高秀华,王云超,安二中,等.基于ADAMS的装载机工作装置优化[J].计算机仿真,2007,24(1):217⁃221.Gao Xiuhua,Wang Yunchao,An Erzhong,et al.Optimiza⁃tion of the working device of loader based on ADAMS[J].Computer simulation,2007,24(1):217⁃221.(in Chinese)
[6]郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天大学出版社,2008:56⁃73.Guo Weidong.Virtual Prototype Technology and ADAMS its Application Examples[M].Beijing:Beihang University Press,2008:56⁃73.(in Chinese)
[7]赵武云.ADAMS基础与应用实例教程[M].北京:清华大学出版社,2012:33⁃52.Zhao Wuyun.Foundation and Application Examples of the ADAMS[M].Beijing:Tsinghua University Press,2012:33⁃52.(in Chinese)
[8]范建成,熊光明,周明飞.MCS.ADAMS应用与提高[M].北京:机械工业出版社,2006:56⁃58.Fan Jiancheng,Xiong Guangming,Zhou Mingfei.Application and Improvement of ADAMS[M].Beijing:China Machine Press,2006:56⁃58.(in Chinese)
Design and Analysis of a Long⁃stroke and Miniaturized Docking Mechanism
LI Longqiu1,2,SHAO Guangbin1,ZHOU Dekai1,LIU Weimin1,WANG Jingxuan1
(1.School of Mechatronics Engineering,Harbin Institute of Technology,Harbin 150001,China;2.State Key Laboratory of Robotics and System,Harbin Institute of Technology,Harbin 150001,China)
To realize the online docking and operation of failed spacecraft or space debris,a minia⁃turized long⁃stroke docking mechanism was proposed according to the requirements and the charac⁃teristics of the non⁃cooperative docking technology.The docking target was the effuse of a satellite on the GEO.The three⁃dimensional model of the docking mechanism was established.On the basis of the model,the range of the envelope space of the docking mechanism was determined.The kinemat⁃ic and dynamic simulation were performed for the docking mechanism using ADAMS to identify the dynamic characteristics of the docking process between the target satellite and the docking mecha⁃nism,the contact force between the effuse and the end effector and the stress on the joints during the docking process.The simulation results showed that the miniaturized long stroke docking mechanism could capture the target satellite effectively and reliably.
long⁃stroke and miniaturized;non⁃cooperative target;docking mechanism
V19
A
1674⁃5825(2016)06⁃0758⁃08
2016⁃05⁃10;
2016⁃11⁃03
上海市空间飞行器机构重点实验室开放课题基金资助项目(06DZ22105)
李隆球(1982-),男,博士,教授,研究方向为航天装备地面模拟与测试技术。E⁃mail:longqiuli@hit.edu.cn
