文化主题园区创意展示系统虚拟体验动感平台的结构设计与仿真
2016-12-23熊禾根杨洪涛
陶 永,高 彭,熊禾根,胡 磊,杨洪涛
(北京航空航天大学,北京 100091)
文化主题园区创意展示系统虚拟体验动感平台的结构设计与仿真
陶 永,高 彭,熊禾根,胡 磊,杨洪涛
(北京航空航天大学,北京 100091)
针对文化主题园区创意展示系统的虚拟体验和虚拟环境需求,设计了一种由Stewart平台演变而来的6自由度虚拟体验动感平台,在其简化后的并联机构平台基础上,添加显示与操作装置,进而通过ADAMS软件对该动感平台中心点进行了关键参数设置与运动仿真,实现了该虚拟体验动感平台在不同场景下的运动轨迹优化,为其位置控制、速度控制奠定了基础,验证了该平台结构设计和运动控制的有效性。
动感平台;并联机构;ADAMS;运动轨迹
0 引言
随着人类需求与技术的发展,虚拟体验技术逐渐变成热门,其可以使体验者在安全环境下体验更真实刺激的环境感受。而在虚拟体验装置的研究中,对于串并联等运动机构的学习更是越来越广泛。
本文针对某文化主题园区创意展示系统的虚拟体验和虚拟环境需求,研究设计了一种基于并联机构的虚拟体验装置-动感平台。在动感平台的相关研究中,其有二自由度、三自由度和六自由度。其中,二自由度和三自由度,其位姿变化较少,在空间上受到一定限制,而六自由度动感平台,基于Stewart平台,可以实现运动机构的上下、左右、前后的位置变化。
在驱动形式上多为传统液压驱动,其液压系统造价高,且对环境易产生污染,且其运动机构上下平台连接处采用胡克铰,会导致一定的运动不平稳等。在此基础上,根据并联结构的特点,设计一种新型结构的虚拟体验动感平台,并进行运动仿真。
1 动感平台的总体方案
本文提出的六自由度并联机构动感平台虚拟体验装置,其总体结构如图1所示:由显示装置、操作装置、移动平台(上平台)、执行机构(驱动杆)、固定平台、控制系统六部分组成。其中,通电模拟软件运行后,经过显示装置将虚拟体验模拟画面显示出来,体验者位于上平台,体验者根据不同虚拟场景(如汽车或过山车等场景)做出不同的控制动作,并通过对位于上平台上的操作装置进行操控。驱动杆会根据不同场景来改变其伸长的长度、速度、加速度等来改变上平台位姿,使虚拟体验达到更好的效果。
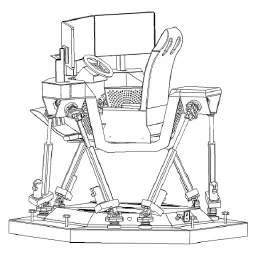
图1 动感平台并联机构整体设计
移动平台结构如图2所示,动感平台简化为Stewart并联机构平台后如图3所示,由上下平台和驱动杆组成。为了增强体验者的模拟感受及机构可靠性,设置上平台为如图2所示的结构,上平台中间下凹,保证运动空间的前提下,有效的降低了上平台重心,可以有效的降低位于体验装置上体验者的重心。

图2 并联机构上平台
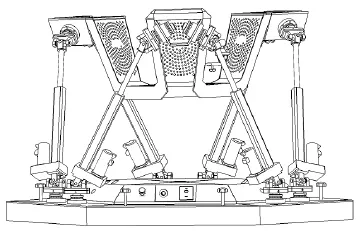
图3 动感平台总体方案
移动平台和固定平台由电动伸缩缸连接,在连接处由两个虎克铰,和转动关节分别与移动平台和固定平台连接,其连接装置如图4所示。驱动杆(电动伺服缸)与移动平台的连接由万向铰和由两个深沟球轴承和两个止推轴承、轴、轴套组成,形成球铰,保证了运动的灵活性。其关节剖视图如图5所示。

图4 转动关节

图5 转动关节剖视图
2 动感平台的控制系统
对于并联机构控制系统的设计,采用电动缸的方式,采用伺服电动缸驱动上平台运动,可以提高动感平台的运动精度。单个伺服电动缸,如图6所示,其中伺服电动缸是将伺服电机与丝杠一体化设计的模块化产品,将伺服电机的旋转运动转换成直线运动,同时将伺服电机最佳优点-精确转速控制,精确转数控制,精确扭矩控制转变成-精确速度控制,精确位置控制等,且可以提供非常灵活的安装配置。
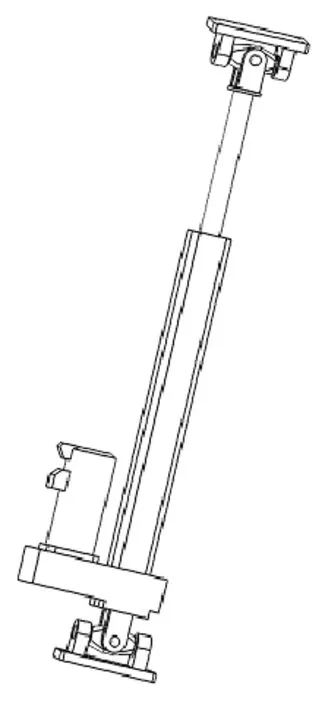
图6 单个伺服电动缸
对于动感平台自由度及机构逆解的计算:
由自由度计算公式:

在式(1)中,q为机构中每个构件的全部自由度个数,在空间机构中q等于6。n为机构构件数;Ni表示自由度为i的运动副的个数。在所设计虚拟体验装置动感平台中,根据公式,计算可得:F=6。
对于动感平台的运动逆解的计算,因为本动感平台是基于Stewart平台的机构模型,其中,Stewart平台一般是由负载平台和固定平台与铰副连接六个伸缩杆移动副构成。首先建立模型的坐标系,其运动逆解是已知移动平台的位姿即三个线性坐标参量(x,y,z)和三个旋转坐标参量求解平台六个电动缸的长度q。
如图6所示,在移动平台和固定平台上选择OA和OB作为参考点,然后以这两个参考点分别建立笛卡尔坐标系{A}和{B},移动平台坐标系A的原点设为P,P点在固定平台B中的坐标向量为P=[xp,yp,zp]T,所以,移动平台的位姿用横滚,俯仰,偏转欧拉角表示为。移动平台坐标系A相对于固定平台坐标系B的旋转矩阵为:

对于动感平台设计中,移动平台和固定平台之间的驱动电动缸来说,作为驱动伸缩杆,对其建立一个闭环向量表达式如下:

其中,i=1,2,…,6。
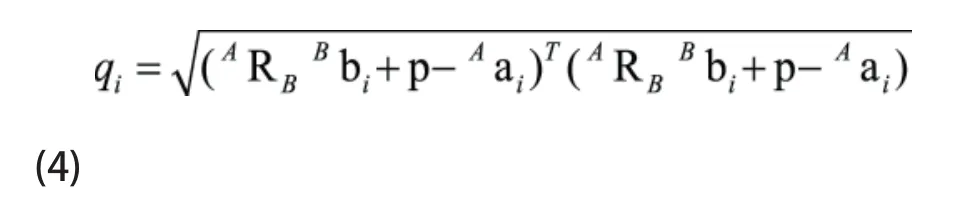
其中,i=1,2,…,6。
在公式中Bbi,Aai为已知量,所以根据相应参数可求得驱动伸缩杆即电动缸的长度,从而求得基于Stewart动感平台的运动学反解。

图7 动感平台原理图
3 仿真实验验证
通过对以上虚拟体验装置动感平台的简化,可得到其简化模型为Stewart平台,进而对Stewart并联结构平台进行模拟仿真。将模型简图,如图8所示,导入ADAMS中,设置上平台中心点为原点。

图8 动感体验平台的ADAMS模型简图
在虚拟体验装置动感平台中,为了更真实的体验模拟环境,我们可设置平台的运动曲线,并在ADAMS软件中进行仿真,在平台的中心点处设置marker点,在空间中,其可以有x,y,z三个方向的平移运动,和分别绕x,y,z方向的转动,在marker点处设置motion。
场景一:为其添加运动方程使平台以正弦或者余弦的形式,(如:ABS(440×sin(2×pi×time)))上下运动,可以得到其中心marker点运动曲线,在仿真运动所设置的时间5s内,其沿z轴运动的位置,速度,加速度路线图如图9所示,以及其中的电动伺服缸驱动杆质心处分别在x,y,z方向上以及其矢量和的运动曲线如图10所示。

图9 上平台中心点沿z轴运动图
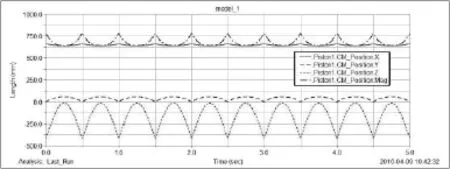
图10 电动伺服缸驱动杆质心位置变化
场景二:当上平台以正弦函数运动形式:sin(2×pi×time)进行绕x轴的转摆时,可在ADAMS仿真里得到各个电动伺服缸驱动杆质心点的运动轨迹在坐标系下的矢量和,如图11所示。
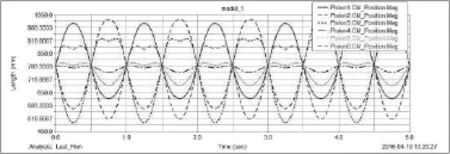
图11 电动伺服缸各驱动杆质心位置变化
场景三:进行两个方向运动的融合,即上平台以运动方程ABS( 440×sin(2×pi×time))的形式沿marker点的z轴向上运动,与此同时使上平台以运动方程sin(2×pi×time)的形式绕x轴转动,可以得到六个驱动杆的位移曲线如下图所示:其中图12为电动伺服缸驱动杆1,2的质心运动曲线矢量图,图13为电动伺服缸驱动杆3,4的质心运动曲线矢量图,图14为电动伺服缸驱动杆5,6的质心运动曲线矢量图。
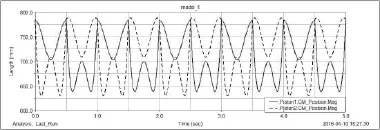
图12 电动伺服缸驱动杆1,2的质心运动曲线
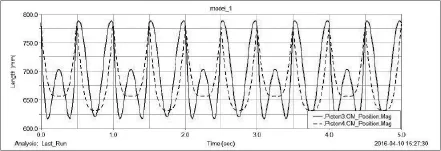
图13 电动伺服缸驱动杆3,4的质心运动曲线
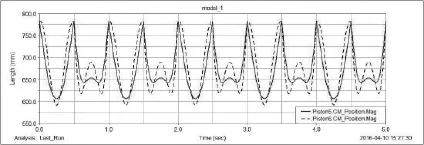
图14 电动伺服缸驱动杆5,6的质心运动曲线
4 结论
通过ADAMS/PostProcesser功能模块,得到动感平台的运动规律,从而对输出数据结果进行统计分析,以及结合对动感平台运动反解的求取,从而对动感平台在不同场景下的运动模式进行更精确的控制,以便达到更真实的虚拟体验效果。
[1] 杨建新,汪劲松,郁鼎文,等.空间并联机构运动学与动力学逆解的模块化计算方法[J].机械工程学报,2005,41(5):104-107.
[2] 彭凯,王建平,李晓峰,等.6自由度3-PRPS并联机器人运动规划分析及仿真[J].机械研究与应用,2010,(5):25-28,33.
[3] 靳业奇,郑海彤.空间机构自由度计算公式的研究[J].科技资讯,2013,(4):133.
[4] 谢国庆,郭欣欣.Stewart平台运动学仿真分析[J].流体传动与控制,2014,(6):19-21.
[5] 郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天大学出版社,2008.
[6] I. Davliakos and E. Papadopoulos.Model-based position tracking control for a 6-dof electrohydraulic Stewart platform[C].Control & Automation,2007.MED‘07. Mediterranean Conference on,Athens,2007:1-6.
[7] H. Hajimirzaalian, H.Moosavi and M. Massah.Dynamics analysis and simulation of parallel robot Stewart platform[J].
The structure design and simulation of the virtual experience dynamic platform for the creative display system of the cultural theme park
TAO Yong, GAO Peng, XIONG He-gen, HU Lei, YANG Hong-tao
TP241.3
A
1009-0134(2016)07-0030-04
2016-04-29
国家科技支撑计划课题:大型文化主题园区创意展示系统技术集成与应用示范(2013BAH45F00)
陶永(1979 -),男,河北新乐人,工学博士,研究方向为工业机器人柔性机械臂技术、嵌入式机电控制技术与飞机柔性装配制造技术。
