基于单片机的智能清洁小车设计
2016-12-23兰茂伟姜威杜中强
兰茂伟,姜威,杜中强
四川理工学院
基于单片机的智能清洁小车设计
兰茂伟,姜威,杜中强
四川理工学院
智能清洁小车用STM32F103RNCT6单片机为控制芯片,本设计完成了小车硬件部分的设计,软件部分采用c语言来编写控制程序,完成了吸尘、洒水、抹地、避障等功能,在家庭及公司使用极为方便,与普通的智能车相比较,由于本设计有清洁的功能,所以本智能小车更加有市场前景,使用更加稳定可靠。经过实验测试,达到了预期的设计要求。
STM32单片机;清洁小车;智能
社会生活发展到如今,有许许多多的关于清洁的技术层出不穷,出现了非常多的新型产品和机械设备,智能清洁小车是把关于智能机器人和吸尘的技术有机地融合到一起,就可以完成房间内的清洁任务,代替以往繁杂的室内保洁工作,这些年来这项技术已经被国内外的研究人员重视起来。(随着人们生活水平不断提高,)一方面,智能清洁小车可以将移动机器人多项关键技术给体现出来,另一方面,智能清洁小车可以解放人们的双手,降低人们的劳动强度,给人们更多的时间去做一些更有意义的工作,这就提高了我们的劳动效率。我们相信这样的智能清洁小车具有广阔的市场前景。
本设计的目的是打造一部能满足普通家庭需要而且性能优良,价格便宜,方便使用的智能清洁小车。使以往需要人工清扫的家庭室内保洁让它来实现,这就让人们的生活更加智能,清洁,让现代的科学技术更好地为人类服务。
一、总体设计
智能清洁小车用STM32F103RNCT6单片机为控制芯片,STM32F103RNCT6较之51单片机的优势在于STM32F103RNCT6单片机程序都是模块化的,因为它自身带好多功能,所以接口相对简单;工作速度也比51单片机快。而51的自身功能少,需要外围元件多,要求对电子器件熟悉程度较高。本清洁小车使用模块化的设计,各模块可分为:避障模块、稳压模块、降压模块、电机驱动模块、地面清洁模块、洒水和抹地模块[1]。该智能清洁小车基本能做到在自动避障的前提下自动吸附小块的垃圾,然后完成洒水和抹地的操作。让我们的生活在高科技的服务下更加智能和整洁。其硬件系统的总体设计如图1所示。
二、硬件设计
(一)电机驱动模块
采用步进电机来作为小车的动力,步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响[2]。电机的驱动元件采用DRV8833,这样就可以精确得对电机定位,而不需要外加传感器。下图为电机驱动和电源模块的原理图。
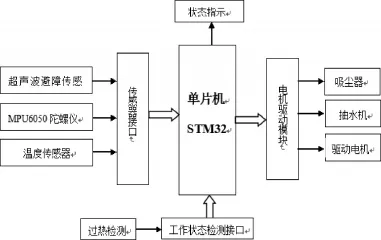
图1 硬件系统的总体设计
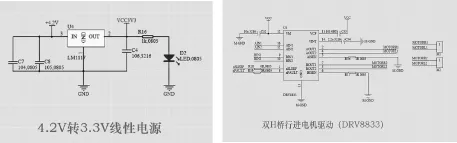
图2 电机驱动和电源模块原理图
(二)避障模块
小车四周装有4个超声波传感器,小车在进行清洁的过程中就会向四周发出超声波,超声波在遇到前方的障碍时就会发生反射,反射回来的超声波信号就会被超声波传感器接收到后传送给单片机,然后经过单片机控制小车进行相应的动作。超声波传感器位于小车四周,这样就可以检测到小车运动时四周的情况,并且对智能清洁小车与障碍物的相对位置做出判断。
(三)吸尘模块
用130强磁高速电机,靠电机高速转动而使空气从一端高速排出,而另一端的空气又源源不断地进入,杂质、纸屑在此气流的作用下被吸进内置的小盒子内,若电机转速越快,则气流越快,那么吸尘能力也越强。而且鉴于吸尘部分吸尘器的功率最大,电机的发热量也最大,所以用到一个温度开关,关断温度65摄氏度,由此保护电机不被烧坏。
三、软件设计
软件部分主要使用c语言进行编程,对芯片进行控制。启动电源智能小车便开始工作,由于房间内,各种物品形状复杂而且摆放不规则。为了保证在房间内的智能小车能有效地避开障碍物显得十分重要。在遇到障碍时的具体避障策略见图3。
四川省大学生创新创业训练计划项目《多功能清洁小车》;项目编号:201410622043。
