压电驱动双面快速指向镜的设计
2016-12-19刘重飞苑自勇徐卫明
宋 盛,刘重飞,苑自勇,徐卫明,舒 嵘,2*
(1.中国科学院 上海技术物理研究所 空间主动光电技术中科院重点实验室,上海 200083;2. 中国科学大学 量子信息与量子科技前沿协同创新中心,安徽 合肥 230026)
压电驱动双面快速指向镜的设计
宋 盛1,刘重飞1,苑自勇1,徐卫明1,舒 嵘1,2*
(1.中国科学院 上海技术物理研究所 空间主动光电技术中科院重点实验室,上海 200083;2. 中国科学大学 量子信息与量子科技前沿协同创新中心,安徽 合肥 230026)
考虑相干激光雷达对光束波前的要求,设计了压电驱动双面快速指向镜系统以实现相干激光遥感探测的高精度大范围指向定位。研究了系统的机械结构和电子学控制方法。结合指向角度、通光口径及信号带宽的实际工程应用需求,选择了合理的致动器和位移放大机构。针对压电陶瓷固有的迟滞和蠕变等非线性效应,设计了以应变片作为位移传感器的模拟比例-积分-微分(Proportion Intergration Differentiation,PID)闭环反馈控制方法。在仿真分析指向镜固有模态频率的基础上,确定了周边支撑的反射镜支撑方式。实验结果表明,该指向系统能够达到指向范围为27 mrad×27 mrad、绝对定位精度优于27 μrad、偏转速率为2.7 rad/s的指标,基本满足激光遥感探测对探测范围、探测精度、探测速率等指向定位的要求。
相干探测;激光雷达;压电驱动;快速指向镜;模拟PID
1 引 言
在现代空间探测工程、军事侦测、工业与医疗设备等国防和国民经济重大相关的课题中,光束的精密指向、跟踪与定位技术已成为不可缺少的重要组成部分。在空间光通信系统中,由于光束发散角小、接收天线视场窄,通信双方必须对对方光学天线进行精确的瞄准和跟踪,保证光束对准,才能建立良好的通信链路。在大气光学应用领域,要求光学天线和光学系统能够快速精确控制光束的指向,以补偿大气扰动、载体振动共同引起的光束偏转和成像噪声[1-5]。
西方发达国家现在对于快速指向镜(Fast Steering Mirror,FSM)的研究已步入成熟阶段,德国PI公司作为微驱动领域的先驱,其研发的高精度指向镜广泛应用于空间通信、光学相移补偿、显微成像等领域。法国CEDRAT公司生产的压电驱动工作台被应用于多种星载精密光学系统中。国内的研究起步较晚,中科院光电技术研究所、西安205所以及中科院长春光学精密机械与物理研究所等单位在高精度指向方面做了大量研究,也取得了较好的成果[6-8]。
在激光遥感探测领域,相干激光雷达对光束波前要求较高,探测器接收视场较小。在对光束进行扫描指向的应用场合,接收回波时需要对发射到自由空间的光束进行实时的角度补偿。采用两面指向镜很难做到发射的扫描角度和补偿的回波角度同步。而采用同一面镜子的正反两面能够有效保证转角的一致性,达到补偿回波发射偏角的目的,使得探测器上接收的角度相对固定。因此,设计出能够实现双面快速指向的快反镜系统对于工程实践具有重要意义。
2 双面快速指向镜结构设计
柔性轴式快速指向镜结构主要包括:致动器、位移放大机构和柔性支撑结构,目前比较活跃的是精确快速的反射镜柔性支撑结构设计与新型轻量化反射镜[9-12]。在实际设计中,指向角度的范围决定了致动器位移的大小;通光口径决定了反射镜的镜面大小;快反镜谐振频率限制了工作信号带宽。图1所示为双面快速指向镜的结构示意图。压电指向镜采用四驱动-两轴方式,即对角线的压电驱动器构成差分顶拉结构,驱动镜片平台的偏转。强度大的镜面平台由柔性机构链接到外部框架上,可以无间隙的连续偏转。

图1 双面快速指向镜结构示意图
2.1 致动器选择
通常音圈电机、压电陶瓷和磁致伸缩材料都可用来驱动柔性支撑的FSM。压电驱动器是利用压电体逆压电效应形成机械驱动或控制能力的装置,驱动器将变形或振动直接作用于从动件实现机械驱动或机械控制,而非传统驱动器那样需要先形成旋转再经转换成为目标动力或运动,此类装置具有结构简单、可控性好、响应速度快、输出力大、换能效率高等优点。除此之外,压电陶瓷能够达到纳米级的位移精度,这在超精密定位和微位移控制中是其它驱动器所无法比拟的,本设计要求中对位移分辨率较高,因此压电陶瓷驱动更适合。单层陶瓷片的变形量比较小,所以在实际应用中,通常采用多层的压电陶瓷堆叠结构,其伸长量与所加电压的关系为:
ΔL=N·E·d·L0,
(1)
其中:ΔL为压电堆叠总伸长量;N为压电陶瓷片数目;E为施加的电场强度;d为压电系数;L0为单片压电陶瓷片的厚度。设计中采用的压电陶瓷参数如表1所示。

表1 压电陶瓷矩形致动器基本参数
2.2 位移放大机构
压电陶瓷致动器具有较高的位移分辨率,但同时也存在着输出位移小的缺点。在有大行程工作要求的情况下,需要对压电陶瓷的输出位移进行放大和导向。柔性铰链微位移放大机构基于杠杆原理,能够实现对微位移的有效放大,其工作原理如图2所示。压电陶瓷在A点产生竖直向上的位移,B点相当于一级杠杆的支点,使D点产生一级放大的位移。C点相当于二级杠杆的支点,由此E点产生二级放大的位移。经仿真分析,两级杠杆式微位移放大结构可将位移放大15倍,拓展了压电致动器的工作行程,可弥补其输出位移小的缺点。

图2 位移放大机构
3 双面快速指向镜驱动控制设计
压电驱动双面指向镜的驱动控制原理如图3所示,以其中一个轴示意,两个压电陶瓷驱动器均为堆叠结构,堆叠A的负极接地,正极与堆叠C的负极相连构成控制输入端U,堆叠C的正极连接到基准电平150 V。当U为75 V时,施加在堆叠A和堆叠C上的电压量相同,因此两堆叠的伸长量相同,镜面平台没有偏角;当U为150 V时,堆叠A的压差为150 V伸长量最大,而堆叠C所受压差为0 V无伸长量,镜面平台以纸面垂线为轴右偏转到最大角度。同理,当U为0 V,镜面左偏最大角度。

图3 快反镜工作原理
3.1 位移传感器
压电陶瓷致动器存在着迟滞和蠕动等非线性因素,如不加处理,会对其应用产生影响。本文设计的指向镜采用4个正方形排布的压电陶瓷,对角线的2个陶瓷构成一维调整结构,陶瓷的连接如图4所示。每个压电陶瓷上黏有2片电阻应变片,作为位移传感器。电阻应变片是基于应变效应制作的,导体材料在外界力的作用下产生机械形变时,其电阻值相应的会发生变化。位移传感器的一维反馈模型如图5所示。每一维的4个应变片组成全桥结构,将陶瓷的位移变化转变为电阻值的变化,再通过差分放大器将电信号放大输出给低通滤波器,低通滤波器能够将信号中的高频杂波滤除,最终作为控制单元的反馈信号。

图4 压电陶瓷连线示意图

图5 一维反馈模型
反馈模型中电阻应变片的全桥分布方式不仅可以有效检测出陶瓷的位移变化,还能够消除电阻值温漂带来的影响。全桥电路的电信号输出可以通过R0微量调节,使信号值在初期调试时能够调节到一个相对零点,弥补4个应变片阻值不一致带来的电压偏差。差分放大器检测全桥电路的输出信号,通过调整放大倍数使输出调节到一个相应的变化范围,从而精确闭环整个控制回路。
3.2 闭环驱动控制
对二维压电指向平台的驱动控制回路采用闭环设计,控制流程原理框图如图6所示。当图像处理主控单元解算得到目标质心位置后,通过高精度数模转换器将位置值转换为0~10 V的轴控制信号。

图6 指向镜闭环驱动控制原理框图
斜率控制器限制目标值信号的变化速率,防止过快的信号变化损害指向镜,系统中将信号变化速率限制在2 V/ms以下。开环闭环选择的灵活设计便于在前期调试时对应变片反馈信号进行调整,使反馈信号与控制信号的变化范围一致。PID控制模块将控制命令信号和传感器反馈信号进行比较,产生功率放大器的信号,实现快速精确的闭环控制。压电指向镜具有丰富的高频谐振分量,必须加以抑制,否则很容易引起谐振现象,对机构造成损坏。典型的措施是在功放电路前面加陷波器,陷波器的中心频率为谐振频率,并能调节带宽。功率放大器将0~10 V的控制信号进行电压和功率放大至0~150 V,以驱动压电陶瓷。
4 实验与分析
实验所用仪器为自准直仪,自准直仪是高精度角度测量仪器,多用于航空航天、船舶、军工等要求精密度极高的行业,其结构简单,体积小,精度高,使用方便,不但可以进行角度测量,也可以进行直线度、垂直度和平面度测量。
其工作原理如图7所示,光线通过位于物镜焦平面的分划板后,经物镜形成平行光。平行光被垂直于光轴的反射镜反射回来,再通过物镜后在焦平面上形成分划板十字标线像与标线重合。当反射镜倾斜微小角度α角时,反射回来的光束就倾斜2α角。
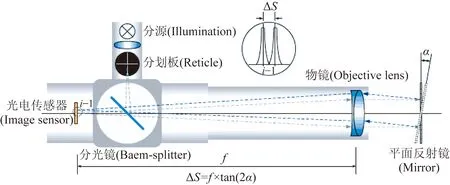
图7 自准直仪工作原理
4.1 指向角度范围
指向角度测量过程中,将0~10 V的控制电压均分成20个点测试,即每次增加0.5 V的控制电压。由于自准直仪测量范围有限,无法在指向镜的全行程范围内进行测试,因此调整为测量相邻两点之间的机械偏转角,最终的偏转角由累加求得。每个点测量200个数据,求均值作为该点偏转角度值,将数据绘制成点状如图8、图9所示。由测试数据可知,X轴和Y轴的全行程偏转范围为27 mrad×27 mrad。
对于不同控制命令电压下指向镜X轴和Y轴的偏转角度,进行一阶线性拟合并求出两轴的线性度,两轴的全量程非线性误差在0.1%以内。对于测试的指向镜,其全程范围为27 mrad,因此绝对定位精度在27 μrad以下。

图8X轴偏转角度和非线性误差系数
Fig.8 Deflection angle and non-linear error coefficient ofX-axis

图9 Y轴偏转角度和非线性误差系数
4.2 指向分辨率
指向镜的指向分辨率受模数转换器输出电压分辨率的影响,模数转换器输出分辨率越高,指向镜的指向分辨率就越高。采用输出电压为0~10 V、分辨率12 bit的高精度模数转换器,其输出电压分辨率为:

(2)
由此可得指向镜的指向分辨率为:

(3)
4.3 偏转速率
指向镜的偏转速率通过测量应变片反馈信号上升沿时间间接测得。测试过程中,指向镜控制器输入一频率为10 Hz、幅值为10 V的方波激励,通过示波器测得X轴和Y轴的应变片反馈信号上升沿时间为10 ms,如图10所示。

图10 反馈信号上升沿时间测量
指向镜的偏转速率为:

(4)
5 结 论
本文以相干激光雷达实际工程需求为背景,系统介绍了压电驱动双面快速指向镜的设计与实现方法。针对应用需求,合理选择致动器与位移放大机构,在仿真分析指向镜固有模态频率的基础上,确定了周边支撑的反射镜支撑方式。在电子学控制部分,设计了以应变片为位移传感器的模拟PID闭环反馈控制方法,有效克服压电陶瓷固有的磁滞和蠕变效应。实验结果证明,本指向镜能够达到指向范围27 mrad×27 mrad、指向精度27 μrad、偏转速率2.7 rad/s的指标,基本满足了相干激光遥感探测应用中的要求。
[1] 鲁亚飞. 快速反射镜机械结构特性设计问题研究[D]. 长沙:国防科技大学,2009. LU Y F.ResearchonFast/FineSteeringMirrorsystem[D]. Changsha:National University of Defense Technology, 2009.(in Chinese)
[2] 张丽敏,郭劲,陈娟. 快速反射镜机械结构研究综述[J]. 光机电信息,2005,3:21-25. ZHANG L M, GUO J, CHEN J. Summary of the mechanic structure for fast-steering mirrors [J].OmeInformation, 2005, 3:21-25.(in Chinese)
[3] 吴博达,鄂世举,杨志刚,等. 压电驱动与控制技术的发展与应用[J]. 机械工程学报,2003,39(10):79-86. WU B D, E SH J, YANG ZH G,etal..Development and application of piezoelectric actuation and control [J].ChineseJournalofMechanicalEngineering, 2003, 39(10):79-86.(in Chinese)
[4] SWEENEY M, RYNKNOWSKI G, KETABCHI M. Design considerations for fast steering mirror [J].SPIE, 2002, 4773: 63-73.
[5] FRANCISC M T, DEREK J E, TIMOTHY R H,etal.. High band width fast steering mirror [J].SPIE, 2005, 5877:1-14.
[6] 徐飞飞,纪明,赵创社. 快速偏转反射镜研究现状及关键技术[J]. 应用光学,2010,31(5):847-851. XU F F, JI M, ZHAO CH SH. Status of fast steering mirror [J].JournalofAppliedOptics, 2010, 31(5):847-851.(in Chinese)
[7] 徐新行,韩旭东,王兵,等. 机载刚性支撑式快速控制反射镜设计[J]. 光学精密工程,2016,24(1):126-133. XU X X, HAN X D, WANG B,etal..Design of fast steering mirror with rigid support structure for airborne platform [J].Opt.PrecisionEng., 2016, 24(1):126-133.(in Chinese)
[8] 杨立斌. 纳米级微定位平台的设计及实验研究[D]. 天津:天津大学,2005. YANG L B.TheDesignandExperimentalResearchofNano-PositioningTable[D]. Tianjin:Tianjin University, 2005.(in Chinese)
[9] 鲁亚飞,范大鹏,范世珣,等. 快速反射镜两轴柔性支承设计[J]. 光学 精密工程,2010,18(12):2574-2583. LU Y F, FAN D P, FAN SH X,etal.. Design of two-axis elastic support for fast steering mirror [J].Opt.PrecisionEng., 2010, 18(12):2574-2583.(in Chinese)
[10] 卢倩,黄卫清,孙梦馨. 基于柔度比优化设计杠杆式柔性铰链放大机构[J]. 光学 精密工程,2016,24(1):102-111. LU Q, HUANG W Q, SUN M X. Optimization design of amplification mechanism for level flexure hinge based on compliance ratio [J].Opt.PrecisionEng., 2016, 24(1):102-111.(in Chinese)
[11] 陈美文. 微小型扫描反射镜的柔顺机构设计及仿真建模[D]. 西安:西安电子科技大学,2012. CHEN M W.TheDesignandSimulationModelingofCompliantMechanismofMicroScanningMirror[D]. Xi’an:Xidian University, 2012.(in Chinese)
[12] 林洁琼,王磊,李迎春,等. 基于有限元的柔性铰链微位移放大机构设计[J]. 机床与液压,2009,37(10):21-23. LIN J Q, WANG L, LI Y CH,etal..Design for micro-displacement magnification mechanism of flexible hinge based on finite element method [J].MachineTool&Hydraulics, 2009, 37(10):21-23.(in Chinese)

舒 嵘(1971-),男,浙江温岭人,博士,研究员,1992年于合肥工业大学获得学士学位,主要从事空间激光遥感与探测技术方面的研究。E-mail: shurong@mail.sitp.ac.cn
(版权所有 未经许可 不得转载)
Design of double-sided fast steering mirror based on piezoelectric actuating
SONG Sheng1, LIU Chong-fei1, YUAN Zi-yong1, XU Wei-ming1, SHU Rong1,2*
(1.Key Laboratory of Space Active Opto-Electronics Technology,ShanghaiInstituteofTechnicalPhysics,ChineseAcademyofSciences,Shanghai200083,China;2.SynergeticInnovationCenterofQuantumInformationandQuantumPhysics,UniversityofScienceandTechnologyofChina,Hefei230026,China)
According to the requirements of laser radars for beam wavefront, a piezo-activated double-sided and fast-steering mirror was designed to realize the high-accuracy beam pointing and wide scanning range of a coherent laser remote system. The mechanical structure of the system and its electronics control method were researched. In consideration of the system requirements for the point angle, clear aperture and the signal bandwidth, an actuator and a displacement amplification mechanism were chosen. To overcome the nonlinear effect of piezoelectric ceramics, such as hysteresis and creep, an analog Proportion Intergration Differentiation(PID) closed-loop feedback control method by taking a strain gauge as the displacement sensor was designed. By analysis of the natural modal frequencies of the pointing mirror, the circum support was determined as the mirror support manner. Experimental results indicate that the pointing accuracy and scanning speed of the system are respectively 27 μrad and 2.7 rad/s at the range of 27 mrad×27 mrad, which satisfies the requirements of laser remote sensing for detection ranges, detection accuracy and detection speeds.
coherent detection; laser radar; piezo-actuating;fast steering mirror; analog PID
2016-05-10;
2016-06-17.
国家自然科学基金资助项目(No.2014AA7100012)
1004-924X(2016)11-2777-06
TN958.98;TP722
A
10.3788/OPE.20162411.2777

宋 盛(1990-),男,上海青浦人,博士研究生,2012年于华东师范大学获得学士学位,主要从事红外图像处理、激光遥感探测方面的研究。E-mail: songsheng03@126.com
*Correspondingauthor,E-mail:shurong@mail.sitp.ac.cn
