基于组合阵的近场噪声源定位方法研究
2016-12-19何盼盼
何盼盼
(昆明船舶设备研究试验中心,云南 昆明 650051)
基于组合阵的近场噪声源定位方法研究
何盼盼
(昆明船舶设备研究试验中心,云南 昆明 650051)
在对浅海近程噪声源定位研究时,针对多途环境和左右舷模糊问题,采用了组合阵与时反技术相结合的方法。利用矢量水听器的单边指向性去除虚假声源的干扰,并利用时间反转镜技术抑制多途效应的影响,从而实现了浅海近程声源定位。
近场噪声源定位;组合阵;时间反转镜;噪声源;多途
在近场区域,由于多途环境的影响,对浅海近程噪声源的定位[1-3]造成了困难。为实现浅海近程噪声源地准确定位,提高定位精度,本文采用了被动时间反转镜技术[4-6]。由于声压水听器的无指向性,使得定位时存在左右舷模糊问题,不能准确识别出声源位置。本文采用了将矢量水听器与声压水听器组成的水平线阵,文中称之为组合阵,利用矢量水听器的振速信息判别真实声源的位置,抑制左右舷问题,去除虚假声源的影响。
1 近场噪声源聚焦定位方法
1.1 近场水平线列阵的接收信号模型
在分析沿各种不同路径达到接收基阵的信号时,可采用基于射线理论的虚源法模拟多途信道下基阵的接收信号,其模型示意图如图1所示。
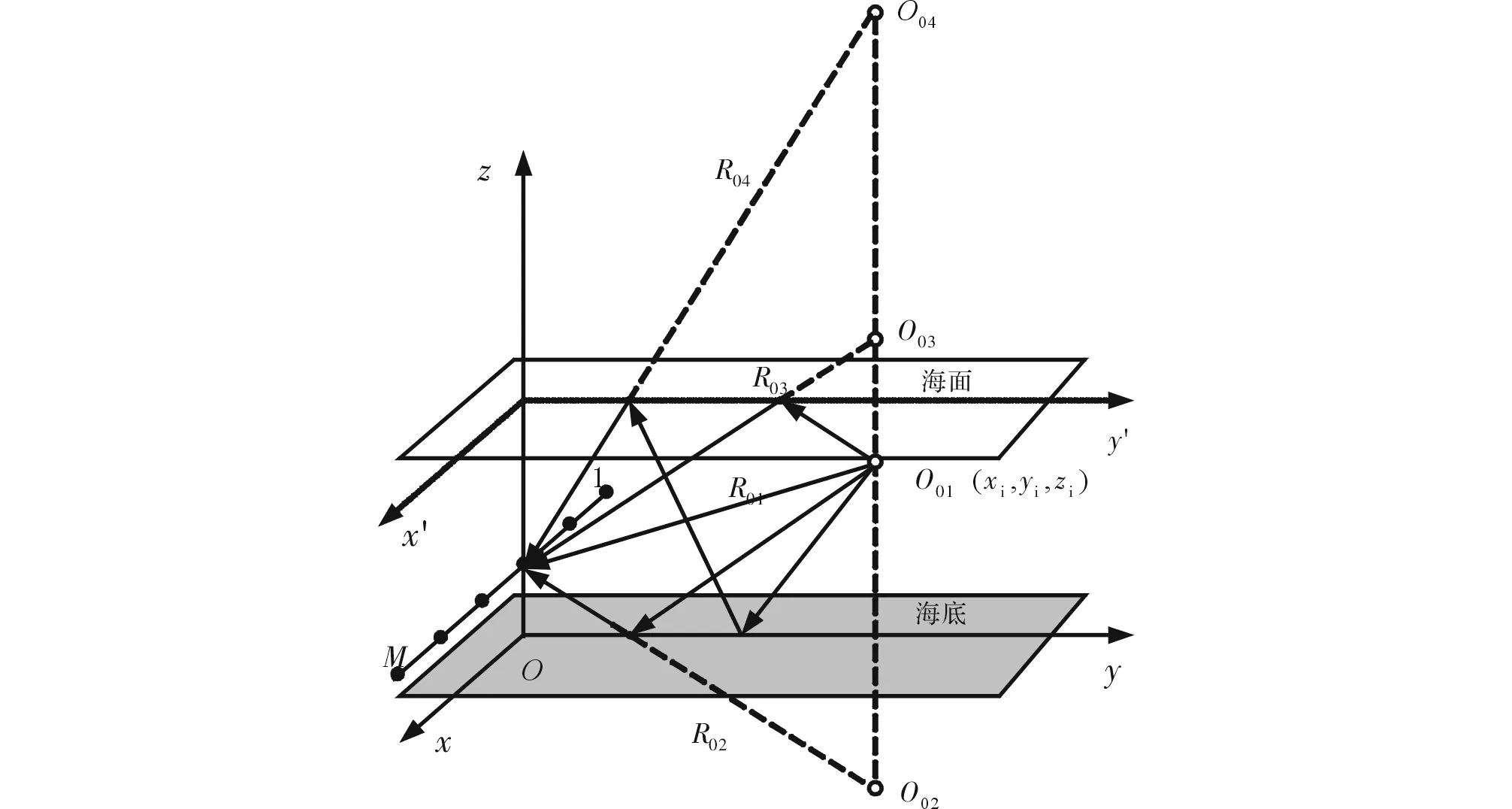
图1 基于射线理论的虚源模型
在此模型中,将海底、海面的反射声看作是声源相对于海底海面的虚源发出的声线。因此,接收到的信号便可认为是由声源和各阶虚源到达接收阵的信号的叠加。
M元水平线阵接收到的信号可表示为X=As+N。其中,A为基阵接收到的声压信号的导向矢量,其表达式可参阅文献[7~8]。
1.2 组合阵近场测量模型
首先以矢量阵[9-12]为例,介绍基于虚源模型的近场噪声源定位原理,其接收信号模型如图2所示。
基阵的接收信号的矢量形式可表示为
X=[xvxvyvz]T=Bs+N
(1)
式(1)中,X是接收信号矩阵;s是声源发射信号;N是接收到的噪声信号;B是矢量阵接收声源信号的导向矢量。
在实际应用中,由于矢量水听器的一致性不佳,会影响到后续的信号处理。为有效减小矢量水听器的一致性对后续信号处理的影响,本文采用了组合阵,旨在不影响对噪声源定位的前提下,减少矢量水听器个数。
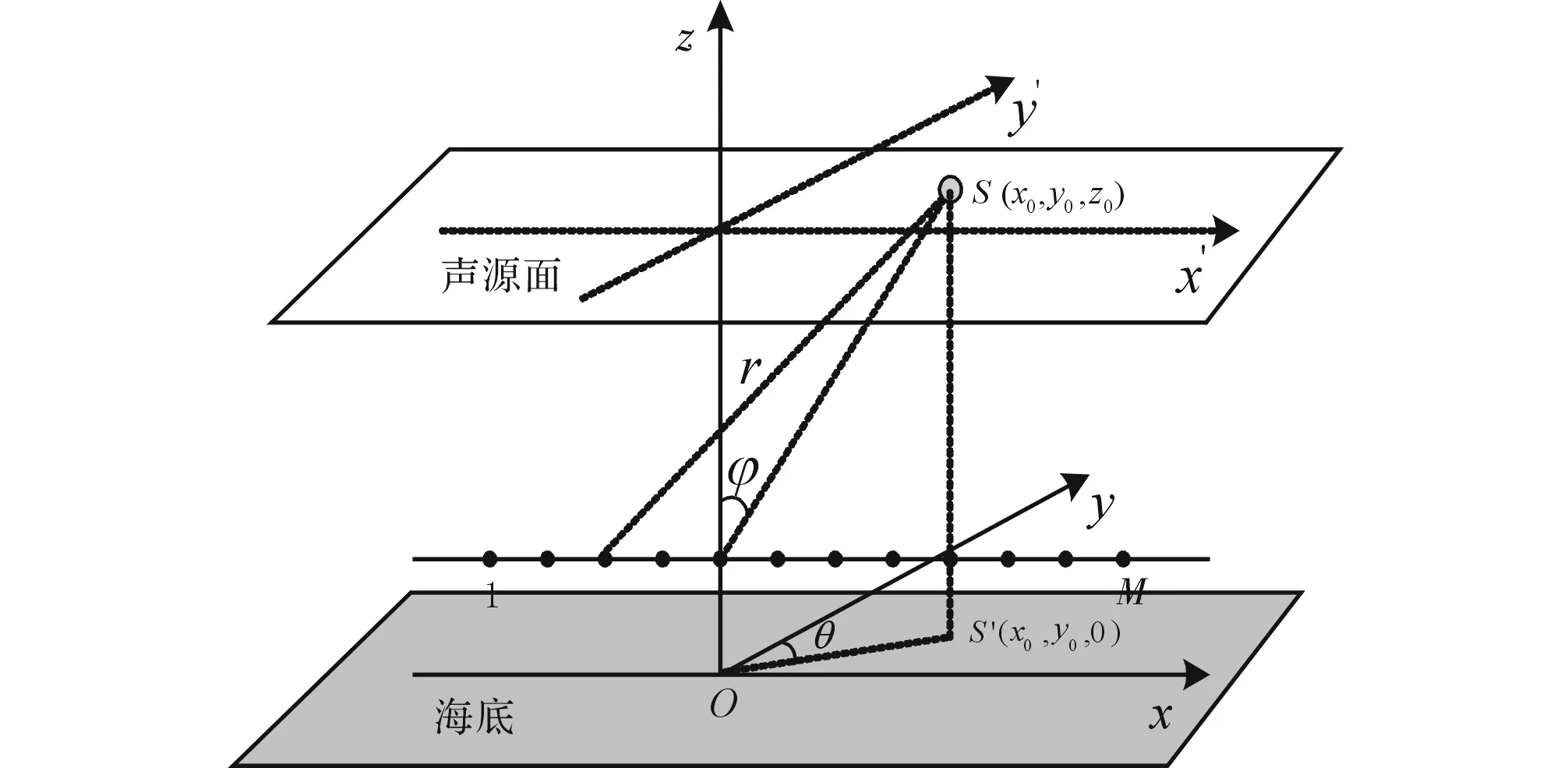
图2 组合阵接收信号模型
组合阵[3-5]包含声压水听器和矢量水听器两种,声压水听器只接收声压信号,矢量水听器除了接收声压信号,还接收振速信号。因此,组合阵的接收信号包括全部水听器接收的声压信息和矢量水听器接收的振速信息,并结合式(1)矢量阵接收信号可得到组合阵的接收信号。
1.3 被动时间反转镜技术
对浅海近程噪声源进行定位时,由于多途环境的存在,会使基阵除了接收到直达声外,还能接收到海底、海面的反射声,直达声与反射声相互干涉叠加,使接收信号发生波形畸变,从而导致通常使用的近场噪声源定位算法存在定位偏差,严重影响聚焦定位性能。为了更精确地实现浅海近程噪声源定位,有效抑制多途信道的干扰,常采用时间反转镜技术。
本文采用被动时反虚拟信道的方法,其原理如图3所示,将阵列接收到的信号通过在计算机中模拟信道的时反这一过程,将计算机中模拟的信道II与声源到达接收阵的真实信道I匹配,当信道相匹配时,具有高的空间增益,当信道不相互匹配时,空间增益下降,从而实现对目标声源的定位。
图3 被动时反技术原理框图
选择与声源同深的平面扫描,设扫描点坐标为(x′,y′,z0),在计算机中模拟该点与基阵之间的信道,结合近场聚焦波束形成可得到扫描点的导向矢量B′,不采用被动TRM时的导向矢量A′只与直达声有关,而采用被动TRM时的导向矢量A′与直达声和海底海面的反射声均有关。
令R=XXH/L为采样数据协方差矩阵,则常规波束形成定位算法(CBF)的空间谱和基于MVDR算法的空间谱分别表示为
PCBF=(A′)R-1(A′)
(4)
(5)
2 试验研究
试验采用的组合阵是11元水平线阵,包括8个声压水听器和3个矢量水听器,编号为1~11,其中第3、6、9号水听器是矢量水听器,阵元间距为0.5 m,基阵入水深度为2 m。接收与发射之间的水平测试距离为3 m,两个发射声源均位于水下3 m,发射信号频率是500 Hz时,采用CBF聚焦算法、MVDR聚焦算法、PTRM-CBF聚焦算法、PTRM-MVDR聚焦算法的定位结果,如图4所示。
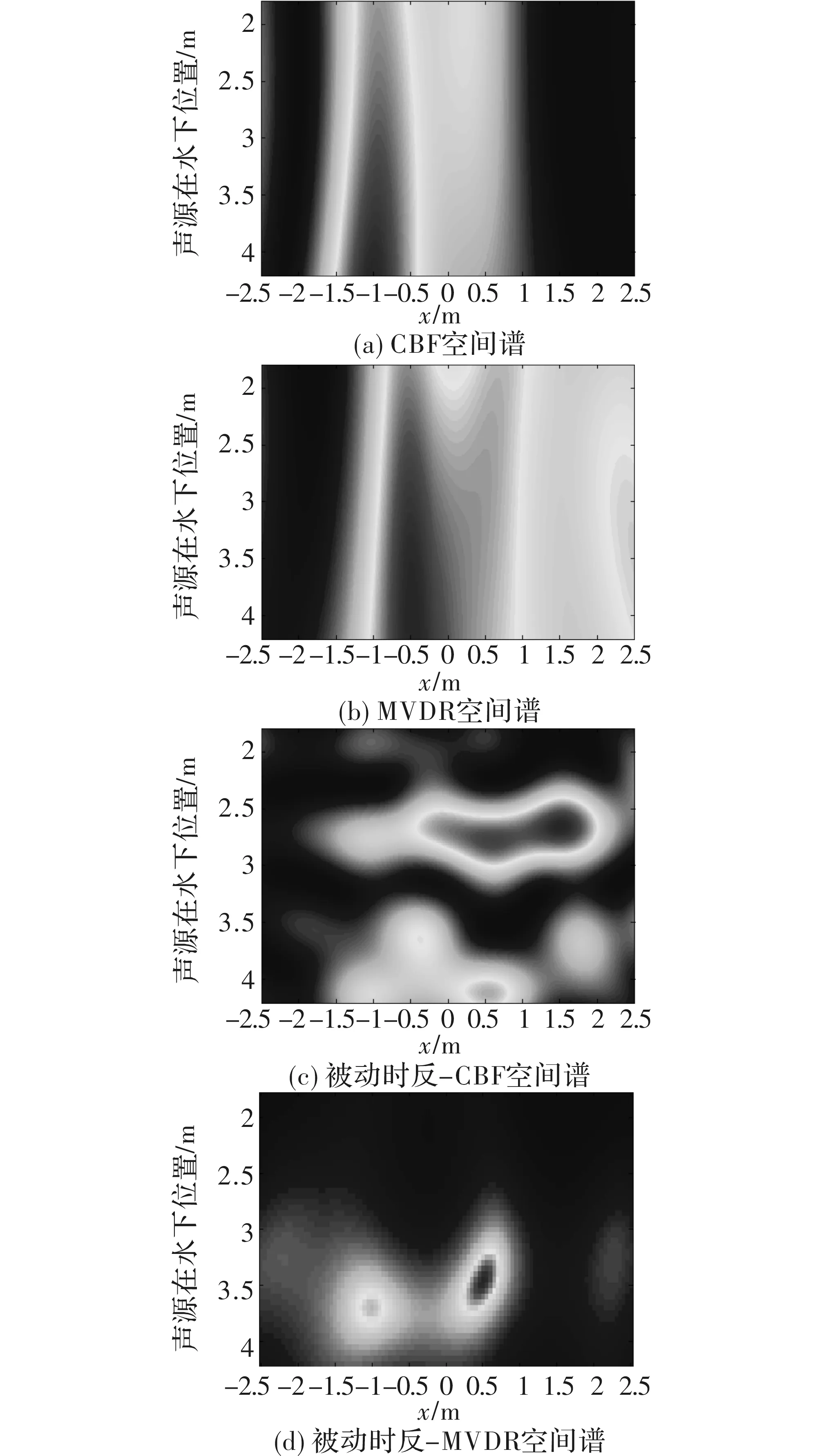
图4 500 Hz时聚焦定位效果图
其他仿真条件不变,发射信号频率为1 kHz时,多途环境下的噪声源聚焦定位结果如图5所示。
图5 1 kHz时聚焦定位效果图
从图4和图5以可看出:(1)对浅海近程噪声源定位时,对比分析了CBF算法和MVDR算法的聚焦谱图,结果表明MVDR聚焦定位算法得到的主瓣更窄,背景更为平滑,空间分辨率更高,定位更为准确;(2)采用被动时反技术能有效克服界面反射的影响,降低主瓣宽度,即被动时反技术能有效利用多途信息,实现更为精确地声源定位;(3) PTRM-MVDR聚焦算法的定位更为准确,且信号频率对定位性能有较大影响,频率增大时PTRM-MVDR聚焦算法的定位性能增强。
3 结束语
对浅海近程噪声源定位时,被动时间反转镜技术(PTRM)能有效利用多途信息,实现信道匹配,克服界面反射声的干扰,识别出真实声源的位置。组合阵技术能有效去除虚假声源干扰,抑制左右舷问题。采用组合阵列和被动时间反转镜技术相结合,合理模拟了多途信道下的导向矢量,利用矢量水听器的振速信息,开展了基于组合阵列的噪声源被动时反聚焦定位方法研究。
[1] 熊鑫,章新华,黄冠,等.近场MVDR聚焦波束形成被动定位方法[J].鱼雷技术,2010,18(6):436-440.
[2] 梅继丹,惠俊英,惠娟.聚焦波束形成声图近场被动定位技术仿真研究[J].系统仿真学报,2008,20(5):1328-1333.
[3] Yong T C,Michael J R.Adaptive near-field beamforming techniques for sound source imageing[J].Journalog Acoust Soc Am,2009,125(2):944-957.
[4] 蔡野峰,邱小军,杨军.基于时间反转的复杂声场拾声传声器阵列性能研究[J].声学学报,2010,35(6):593-600.
[5] 余赞.浅海多途信道中声聚焦与声屏蔽技术研究[D].哈尔滨:哈尔滨工程大学,2009.
[6] 陈羽,倪明,张振慧.浅海中水平阵时反聚焦性能研究[J].应用声学,2011,30(4):295-301.
[7] 时洁,杨德森,刘伯胜.基于虚拟时间反转镜的噪声源近场定位方法研究[J].兵工学报,2008,29(10): 1215-1219.
[8] 安丽娜.基于被动时反技术的噪声源近场定位方法研究[D].哈尔滨:哈尔滨工程大学,2013.
[9] 时洁,杨德森.基于矢量阵宽带MVDR聚焦波束形成的水下噪声源定位方法[J].信号处理,2010,26(5):687-694.
[10] 白兴宇.基于联合信息处理的声矢量阵测向技术[D].哈尔滨:哈尔滨工程大学,2006.
[11] 时洁.基于矢量处理的水下噪声源近场高分辨定位识别方法研究[D].哈尔滨:哈尔滨工程大学,2009.
[12] 时洁,杨德森,时胜国.基于多途模型匹配的浅海噪声源聚焦定位方法[J].电子学报,2013,41(3): 575-581.
[13] 余桐奎.矢量声压组合基阵MVDR近场聚焦波束形成[J].舰船科学技术,2012,34(6):60-63.
Research on Near-field Noise Sources Location Method Based on the Combinatory Array
HE Panpan
(Kunming Shipborne Equipment Research and Test Center, Kunming 650051, China)
In the study of localization in shallow sea noise source, beause of the problem of port and starboard ambiguity and the multipath environment, the combinatory array and time reversal mirro technology are adopted. Using the unilateral directivity of the vector hydrophone removes the false source, Using the time reversal mirror technology restrains the influence of the multipath effect, thus the position of sound source in shallow sea can be located.
near field noise source localization;combinatory array; time reversal mirror; noise sources; multipath
2016- 01- 13
何盼盼(1989-),女,硕士,助理工程师。研究方向:目标定位及弹道测量。
10.16180/j.cnki.issn1007-7820.2016.11.010
TN911.4
A
1007-7820(2016)11-032-03