地空导弹对机动目标射击时机的搜索算法
2016-12-19张雅舰李金晖王玉冰
张雅舰,李金晖,王玉冰,李 翔
(空军工程大学防空反导学院,西安 710051)
地空导弹对机动目标射击时机的搜索算法
张雅舰,李金晖,王玉冰,李 翔
(空军工程大学防空反导学院,西安 710051)
机动对抗是空中目标反地空导弹射击的重要手段。如何确定地空导弹对机动目标的射击时机是一个复杂的问题。现有解决问题的方法主要是数学计算结合图上作业,其缺点是计算复杂,效率较低,应用不便。文中在研究空中目标的典型水平机动方式和两种作战模式下地空导弹对机动目标射击时机要求的基础上,提出了一种新的算法。这种算法通过平面栅格化、虚拟航迹、逐点判定、搜索平面、计算结果处理等5个步骤,能够解决地空导弹对机动目标射击时机的确定问题。仿真实验结果证明了算法的正确性和有效性。与数学计算结合图上作业的方法相比,搜索算法具有通用性、简便性和实用性的优点。
地空导弹;水平机动;射击时机;搜索算法;杀伤区;发射区
0 引言
机动对抗是空中目标反地空导弹射击的重要手段。为规避地空导弹的射击,目标在紧急情况下可能有3种机动方式:速度机动、高度机动和水平机动。速度机动,不管是加速还是减速,对目标是否进入地空导弹杀伤区的影响不是很显著。高度机动,对于地空导弹武器系统而言没有太大的意义,因为受飞行器最大升限的限制,地空导弹武器系统的射击空域大多都能覆盖目标的飞行高度。因此,目标反地空导弹射击最为有利的方式就是水平机动[1]。20世纪60年代,U-2高空侦察机对我国进行侦察时多次采用水平机动的方式摆脱我地空导弹部队的射击。后来,我地空导弹部队使用近快战法才一举打掉了水平机动的U-2高空侦察机[2]。
未来,仍然面临敌高空侦察机的侦察,除了性能发展了的U-2R外,还面临诸如RQ-4“全球鹰”无人机的威胁[3]。另外,随着地空导弹射程的不断扩展,如何在地空导弹杀伤区的中远界杀伤随时可能实施机动的空中目标(比如远距离支援干扰机和预警机),对于地空导弹武器系统的作战运用具有十分重要的意义。现有确定地空导弹对机动目标射击时机的方法,主要是通过数学计算结合图上作业的方法[1,4],计算复杂,效率较低,且不适合应用于指挥信息系统。因此,需要寻求新的算法来解决这一难题。
1 问题描述
1.1 坐标系
为方便描述地空导弹和机动目标的相对位置关系,选取地面直角坐标系作为参照系。地面直角坐标系如图1所示。图中:O为坐标原点,选取地空导弹武器系统制导站的所在点;OX轴在通过原点O的水平面内,取指向正北方向为正;OY轴垂直于水平面,指向上方为正;OZ轴垂直于OX轴和OY轴,指向用右手法则确定。
图1 地面直角坐标系
1.2 典型的水平机动方式
空中目标遇到地空导弹拦截时,典型的水平机动方式有两种[1]:
1)起初目标水平等速直线临近地空导弹阵地,发现地空导弹阵地射击时,目标做180°的水平转弯,然后转为水平等速直线离远飞行。目标向右转弯为右机动,向左转弯为左机动,其航迹的水平投影如图2所示。

图2 目标做180°的水平机动
2)起初目标水平等速直线临近地空导弹阵地,发现地空导弹阵地射击时,目标做一定角度的水平转弯,然后沿径向水平等速直线离远飞行。目标向右转弯为右机动,向左转弯为左机动,其航迹的水平投影如图3所示。
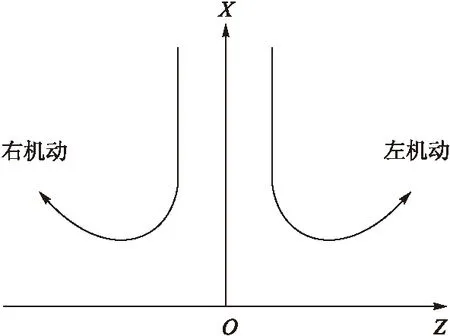
图3 目标做一定角度的水平机动
1.3 地空导弹对机动目标射击时机的要求
不同作战模式下,地空导弹对机动目标射击时机的要求不同,这里进行分别讨论。
1)平台中心战模式
平台中心战的显著特征是武器系统和传感器之间的紧密耦合,武器系统只能利用隶属配置的制导雷达提供的信息进行火力控制[5]。这种作战模式下,地空导弹武器系统依靠上级空情通报和目标搜索指示系统发现和识别空中目标,但要完成对目标的射击必须通过制导雷达对目标进行稳定跟踪。在制导雷达稳定跟踪并计算出目标射击诸元的条件下,指挥员才能作出发射决策,下达发射命令,最终发射导弹杀伤空中目标。但现代作战飞机普遍装有机载雷达告警接收机告警系统[6],一旦地空导弹武器系统的制导雷达对其进行照射,机载雷达告警接收机告警系统将自动进行侦察、识别和告警,随后目标将进入机动飞行状态。
平台中心战模式下,典型射击过程如图4所示,目标到达K点时地空导弹制导雷达开天线进行搜索,目标到达J点时机载雷达告警器开始告警,随后目标进入机动飞行状态。目标到达F点时地空导弹制导雷达完成对目标的稳定跟踪,指挥员作出发射决策,下达发射命令,导弹发射。目标到达S点时与地空导弹在空中遭遇。以地空导弹制导雷达开天线的时间Tk为起始时间,目标转入机动飞行状态的时间为Tj,地空导弹发射的时间为Tf。通常,Tj由机载雷达告警器性能决定,Tf由目标信号强度、制导雷达性能、战场电磁环境和指战员训练水平决定。

图4 平台中心战模式下射击过程示意图
在平台中心战模式下,为保证弹目遭遇点S位于地空导弹杀伤区内,需要确定地空导弹的发射时机。但仅仅确定地空导弹的发射时机是不够的,如果制导雷达开天线过早,目标将不进入地空导弹杀伤区,提前飞离;如果制导雷达开天线过晚,目标将有可能穿越地空导弹杀伤区,成功突防。正因为地空导弹在发射前目标已经开始机动,而目标机动是由制导雷达照射目标引起的,所以寻根溯源,确定地空导弹对机动目标的射击时机应首先确定制导雷达开天线的时机。因此,平台中心战模式下,确定地空导弹对机动目标射击时机的重点是:确定目标飞行至何种区域时地空导弹制导雷达可以开天线,即制导雷达开天线区。
2)网络中心战模式
网络中心战模式下,武器系统可以利用非隶属配置的传感器提供的信息形成拦截作战方案,并据此实施拦截作战[5,7]。与平台中心战不同,地空导弹武器系统可以借助外部传感器的空情信息实现对目标的稳定跟踪,以此求测射击诸元,作出发射决策,而隶属配置的制导雷达可以晚开天线甚至不开天线。地空导弹发射后,空中目标的机载导弹逼近告警系统可以通过侦察地空导弹的雷达多普勒信号或发动机尾焰的紫外、红外信号,对地空导弹的逼近进行告警[8-9]。机载导弹逼近告警系统一旦告警,目标将进入机动飞行状态。
网络中心战模式下,典型射击过程如图5所示,地空导弹武器系统借助外部传感器的空情信息对目标进行稳定跟踪,指挥员作出发射决策,下达发射命令。目标到达F点时地空导弹发射,目标到达J点时机载导弹逼近告警系统开始告警,随后目标进入机动飞行状态。目标到达S点时与地空导弹在空中遭遇。以地空导弹发射的时间Tf为起始时间,目标转入机动飞行状态的时间为Tj。通常,Tj由地空导弹信号强度、机载导弹逼近告警系统性能和战场电磁环境决定。
网络中心战模式下,确定地空导弹对机动目标射击时机的重点是:确定目标飞行至何种区域时地空导弹可以发射,即地空导弹对机动目标的发射区。

图5 网络中心战模式下射击过程示意图
2 算法设计
如前文所述,不同作战模式下地空导弹对空中目标的射击过程不同,空中目标转入机动飞行状态的时机也不相同。平台中心战模式下,空中目标转入机动飞行状态的时间早于地空导弹发射的时间;网络中心战模式下,空中目标转入机动飞行状态的时间晚于地空导弹发射的时间。不同作战模式下,确定地空导弹对机动目标射击时机的要求不同,关注的重点不同。另外,空中目标的机动方式具有多样性。因此,用现有的可靠发射区(保险发射区)理论难以解决确定地空导弹对机动目标射击时机这一难题。
搜索算法是解决这一难题的一种新的方法。该算法的主要过程包括5个步骤:
1)平面栅格化。将目标飞行高度H所在平面栅格化,如图6(a)所示。栅格的范围参考制导雷达的威力范围或地空导弹发射区的远界进行预估,栅格的间隔根据算法的精度要求确定。
2)虚拟航迹。在高度H所在的平面栅格内,选择栅格内任意一点A,以A作为地空导弹对机动目标射击的起始点(相当于平台中心战模式下的K点或网络中心战模式下的F点)。按照不同的作战模式和不同的机动方式,结合目标的飞行速度和水平机动过载,虚拟出目标离开A点之后的航迹LA,如图6(b)所示。虚拟航迹时,可以参照制导雷达的工作周期,生成等时间间隔的点迹。虚拟航迹的终点,限制在地空导弹杀伤区的远界。
3)逐点判定。在A点生成的虚拟航迹LA上,按照时间顺序,对虚拟航迹点A1,A2,…,An进行逐点判定。判据Ⅰ:空中目标从起始点A飞行至Am点(1≤m≤n)所用的时间Tm,是否等于从射击起始时间到地空导弹飞行至Am所用的时间Td。实际运算时,允许Tm和Td之间的差值在某一阈值范围内。判据Ⅱ:点Am是否处于地空导弹杀伤区。判据Ⅰ的含义为:地空导弹与空中目标是否会在Am点遭遇;判据Ⅱ的含义为:弹目遭遇点Am是否处于地空导弹杀伤区。在虚拟航迹LA上,只要存在任意一点Am同时满足判据Ⅰ和判据Ⅱ,则说明A点可以作为地空导弹对机动目标射击的起始点。反之,认为A点不能作为地空导弹对机动目标射击的起始点。
4)搜索平面。在高度H的平面栅格上,依次取与A相邻的点B,点C,…,执行步骤2)和3),判断当前点能否作为地空导弹对机动目标射击的起始点,直至遍历平面栅格上所有的点。
5)计算结果处理。在高度H的平面栅格上,收集所有满足要求的起始点,形成集合M。用曲线包围点集M形成的区域,就是地空导弹可以对机动目标进行射击的区域,如图6(c)所示。将处理后的计算结果显示在指挥信息系统的射击指挥显示器上,将有助于指挥员对机动目标的射击指挥。

图6 算法步骤图
3 算例
目标飞行高度H=20 km,飞行速度Vm=200 m/s,机动方式如图2所示,水平机动转弯半径R=30 km。
地空导弹杀伤区远界水平距离dsy=30 km,近界水平距离dsj=10 km,最大航路角qmax=60°。地空导弹从发射到与目标遭遇的时间Tz与弹目遭遇距离Dz之间的关系,满足代数表达式Tz=Dz+12(15 km≤Dz≤40 km),其中Dz单位为km,Tz单位为s。
分别计算两种作战模式下,地空导弹对机动目标的射击时机。假设平台中心战模式下,从地空导弹制导雷达开天线照射目标到目标转入机动飞行状态的时间Tj=3 s,地空导弹制导雷达开天线到导弹发射的时间Tf=10 s;网络中心战模式下,从地空导弹发射到目标进入机动飞行状态的时间Tj=5 s。
为了对提出的算法进行验证,文中用VC++编写了算法软件并进行了仿真实验,并用Matlab对实验结果进行了统计分析,仿真结果如图7、图8所示。

图7 平台中心战模式下制导雷达开天线区
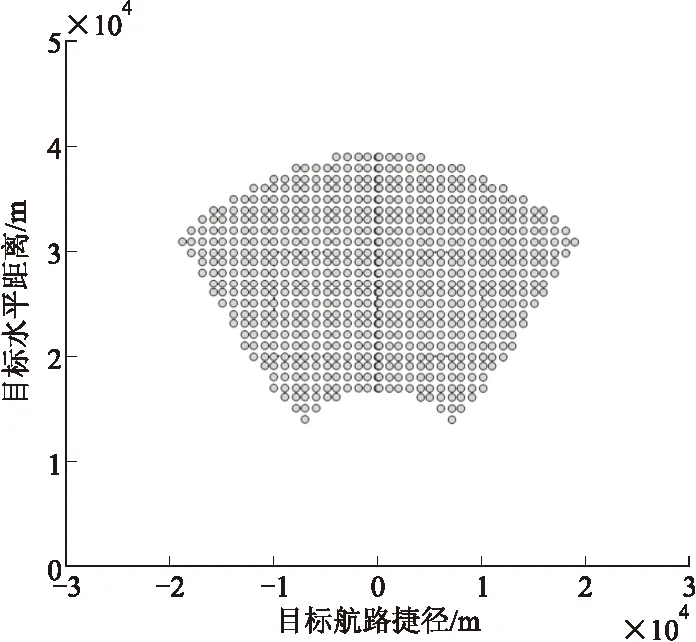
图8 网络中心战模式下地空导弹对机动目标的发射区
在对机动目标的射击指挥中,指挥员尤其重视制导雷达开天线最远距离或地空导弹发射区最远距离。根据计算结果,文中统计出目标航路捷径P不同情况下,制导雷达开天线最远距离Dk和地空导弹发射区最远距离Df,如表1所示。
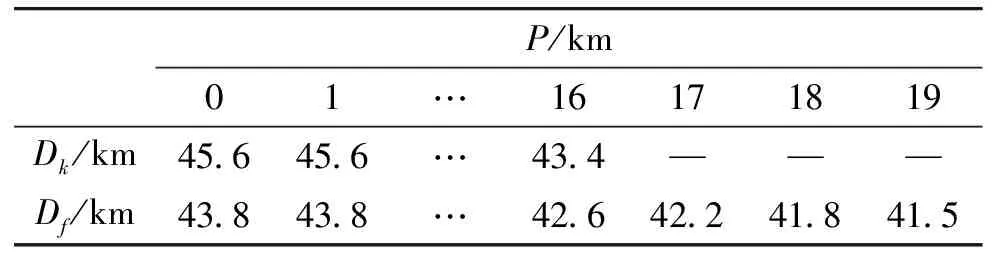
表1 计算结果统计
将上述计算结果与数学计算结果进行对比,搜索算法计算结果与数学计算结果基本吻合,搜索算法计算的精度可以满足射击指挥的使用需求。
4 结束语
综上所述,文中提出的搜索算法能够很好解决地空导弹对机动目标射击时机的确定问题。与数学计算结合图上作业的方法相比,该算法具有以下优点。
1)通用性。该算法适用于不同的作战模式、目标机动方式、地空导弹武器系统。算法如果采用模块化设计,不同的作战模式、目标机动方式。地空导弹武器系统只影响算法的部分模块,甚至只影响部分参数设置。这就使算法具有普遍的适用性和很高的开发效率。
2)简便性。搜索算法用搜索过程代替计算过程,能有效降低算法的复杂性。目标在水平机动过程中,如果进行匀加速,或者进行蛇形机动,用数学计算的方法将十分复杂[10],而用搜索算法则能化繁为简。
3)实用性。现有的可靠发射区理论主要用于确定目标实施机动与不机动的共同发射区,其基本假设是在地空导弹发射前目标保持平直等速飞行。对于目标实施机动早于地空导弹发射的情况,用可靠发射区理论来确定射击时机将是困难的。而搜索算法直接求解不同作战模式下,指挥员对机动目标射击时机关注的重点。因此,算法具有很强的实用性。
搜索算法不可避免地会带来运行效率较低的问题。上述算例中,求解平台中心战模式下制导雷达开天线区和网络中心战模式下地空导弹对机动目标的发射区,在硬件配置为CPU主频2.94 GHz、内存容量2 GB的计算机下,分别耗时7.625 s和7.266 s。因此,该算法更适合用于指挥信息系统中的辅助决策系统或任务规划系统。如需提高算法的实时性,一方面可以采用分布式计算的方法,一方面可以对搜索算法进行深层次的优化。这正是下一阶段的研究方向。
[1] 马栓柱, 刘飞. 地空导弹射击学 [M]. 西安: 西北工业大学出版社, 2012: 240-245.
[2] 陈辉亭. 中国地空导弹部队作战实录 [M]. 北京: 解放军文艺出版社, 2008: 216-230.
[3] 段立波, 李炜, 张大鹏. “全球鹰”航空侦察对地面防空兵抗击行动的影响 [J]. 空军工程大学学报(军事科学版), 2014(2): 30-31.
[4] 娄寿春. 地空导弹射击指挥控制模型 [M]. 北京: 国防工业出版社, 2009: 147-151.
[5] 毛昭军, 李云芝. 网络化防空反导体系一体化火力控制问题 [J]. 火力与指挥控制, 2008, 33(6): 5-9.
[6] 马雷挺, 方立恭, 金钊, 等. 舰空导弹对飞机目标近快战发射区研究 [J]. 现代防御技术, 2008, 36(3): 17-21.
[7] 武思军. 防空反导网络化作战发展研究 [J]. 现代防御技术, 2012, 40(1): 55-59.
[8] 程明阳, 路学荣. 机载导弹逼近告警系统分析 [J]. 航空兵器, 2007(4): 49-53.
[9] 张洁. 机载导弹逼近告警技术发展分析 [J]. 舰船电子工程, 2007, 34(11): 19-23.
[10] 王立军, 周家杰. 机动目标对舰空导弹发射区的影响 [J]. 论证与研究, 2014, 30(2): 43-47.
Search Algorithm for Shooting Time of Surface-to-air Missile Against Maneuvering Target
ZHANG Yajian,LI Jinghui,WANG Yubing,LI Xiang
(Air and missile Defense College, Air Force Engineering University, Xi’an 710051, China)
Maneuver countermeasure is an important means of aerial target against surface-to-air missile shooting. How to determine the shooting time of surface-to-air missile against maneuvering target is a complex problem. The existing method to solve the problem is a mathematical calculation method combined with graphic operation, but the method is very complex, inefficient and inconvenient. A new algorithm was proposed in this paper based on research of typical horizontal maneuvering method of aerial target and shooting time requirement of surface-to-air missile against maneuvering target in two kinds of operation mode. This search algorithm can solve the problem of calculating shooting time of surface-to-air missile against maneuvering target through five steps including rasterizing two-dimensional plane, virtually generating track, judging point by point, searching the two-dimensional plane and processing results. Simulation result shows correctness and effectiveness of the proposed algorithm. Compared with the mathematical calculation method combined with graphic operation, the search algorithm has advantage of versatility, simplicity and practicability.
surface-to-air missile; horizontal maneuvering; shooting time; search algorithm; kill zone; launch zone
2015-10-17
全军军事类研究生资助课题(2011JY002-499)资助
张雅舰(1980-),男,山西太谷人,讲师,博士研究生,研究方向:军事建模与仿真。
TJ762.1+3
A
