基于无限因子隐Markov模型的旋转机械故障识别方法
2016-12-17李志农熊俊伟
李志农,熊俊伟
(无损检测技术教育部重点实验室(南昌航空大学),南昌 330063)
基于无限因子隐Markov模型的旋转机械故障识别方法
李志农,熊俊伟
(无损检测技术教育部重点实验室(南昌航空大学),南昌 330063)
在机械故障识别方面,因子隐Markov模型是目前常用的识别工具。无限因子隐Markov模型(IFHMM)是因子隐Markov模型(FHMM)的一种扩展形式,克服了因子隐Markov模型链条数往往事先假定的缺点。本研究将无限因子隐Markov模型(IFHMM)运用到旋转机械的升降速过程故障的诊断当中,提出了使用IFHMM作为诊断工具的旋转机械故障诊断方法,并与基于因子隐Markov模型的旋转机械故障诊断方法进行了对比,最后将提出的方法成功地应用到旋转机械的故障中。实验结果表明,提出的方法明显优于FHMM识别方法。
无限因子隐Markov模型;模式识别;故障诊断;旋转机械
0 引言
因子隐Markov模型(Factor Hidden Markov Model,简称FHMM)是一种随时间变化的动态模式识别工具,能够对时间跨度上的数据信息进行统计建模与分类,且已成功地应用到了机械故障信号诊断中[1-6]。然而,在FHMM中,隐式Markov链条数如何选择,缺乏依据,往往是事先假定。针对此问题,Ghahramani Z等[7-10]将FHMM中隐式Markov链条数设定为无穷大,然后通过求极限确定合适的隐式Markov链条数,把这种延拓的FHMM称为无限因子隐Markov模型(Infinite Factor Hidden Markov Model,简称IFHMM)[11-12]。IFHMM也是一个动态识别模型,文献[13-15]利用此模型做了贝叶斯非参数谱图建模并取得了一定的成果。本研究详细论述了IFHMM理论与算法,并将此动态模式识别工具应用到处在升降速过程中的旋转机械的故障诊断中,提出了基于IFHMM的旋转机械故障诊断方法,并与传统的FHMM故障识别方法进行对比研究,拟验证该方法的有效性。
1 IFHMM的基本概念和算法
在FHMM中,存在多条隐Markov链条,每条隐Markov链中包含了若干个隐状态,这些隐状态S={St:t=1,2,…,T}之间相互转移构成了一个转移矩阵,并决定了观测值序列的概率。观测序列依赖于隐状态序列Y={Yt:t=1,2,…,T},它们之间的联合概率函数为
(1)
其中,F(θst)表示与状态有关的参数θst的似然模型F(·)。在t时刻的观测序列yt相对t-1时刻的隐状态st-1的边缘概率分布为
(2)
显然观测值yt由一个混合模型产生。

图1 因子隐Markov模型
在FHMM中,信息通过平行的Markov链传播,这些平行的Markov链可看成是随时间变化的系统隐藏特征。FHMM定义了一个概率分布:M条Markov链的状态s(1),s(2),…,s(M)在每一时刻t按照马尔科夫动态过程变化,与此同时,Markov链产生对应的观测值yt,显然,FHMM是一个动态贝叶斯网络。然而,FHMM仍然有其缺点,那就是Markov链条数M是有限的,必须事先人为给定M值,而如何选择M值也缺乏依据。
为克服此不足,引入一个有限元模型。假设状态矩阵S是一个M行(特征)T列(数据点)的矩阵,该矩阵的每一行都是一条Markov链。stm代表第m条Markov链在t时刻的隐状态。每条链按以下转移矩阵进化。
(3)

每条链的初始状态假设为0,即s0~M=0。第m条Markov链条满足m∈{1,2,…,M},并且
(4)

(5)
将式(4)代入式(5)中,得到
(6)
其中,Γ(x)是Gamma函数。计算M→∞时式(6)的极限,显然,单链时极限为0,但此处计算的是m∈(1,…,M)的累加值。因为与特征m的顺序无关,模型在行上是可互换的,因此本研究可采用计算式(6)的左序等价形式的累加值的极限。这里,状态矩阵S的左序等价形式矩阵定义如下:


(7)
计算M→∞时的极限得到

(8)
其中:HT是调和数,M+表示在0~T之间至少转换一次的Markov链条数。
从式(8)中不难看出,上述模型在行与列上是马尔科夫可交换[11]的。因此可以利用马尔科夫印度餐馆过程(markov Indian Buffet Process,简称mIBP)[ 11]来修正方式(8)中的p([S]),得到[11]
(9)
(10)
最后,利用截棍构造模型[12]对方程式(10)继续修正得到
(11)
其中,M+~Poisson(αHT),Γ(·)是Gamma函数,α、γ、δ是超验参数,HT是调和数。无限因子隐Markov模型图如图2所示。
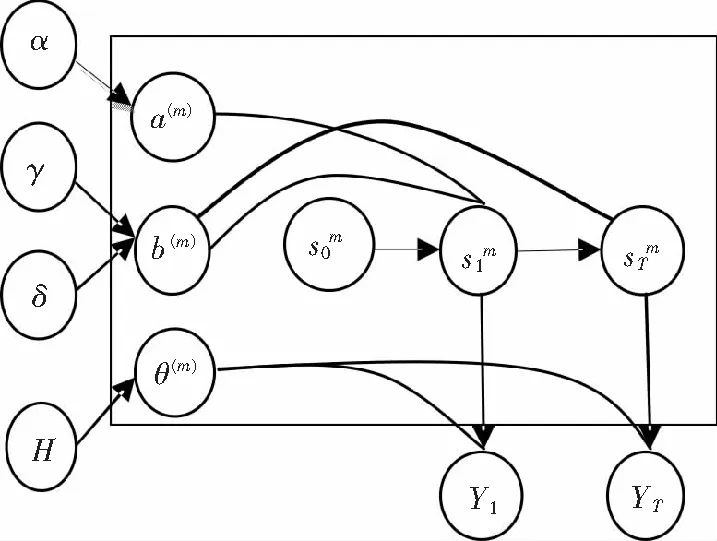
图2 无限因子隐Markov模型
2 基于IFHMM的旋转机械故障诊断方法
基于IFHMM的旋转机械故障诊断的基本思路为:首先,提取故障的特征,利用快速傅里叶变换(Fast Fourier transform,简称FFT)来提取各种典型故障的0.5、1、2、3、4、5倍频的数据构成特征向量。使用特定模式的IFHMM对其训练,得到每种模式下IFHMM产生该序列的概率,最大值即机组所对应的状态(图3)。
3 实验研究
本实验使用的是Bently转子实验台,模拟旋转机械在升降速过程中的常见故障模式。转子不平衡、油膜涡动是常见的故障,另外还有机座松动、转轴碰摩两种故障,为了便于比较,还做了正常状态,共5种状态下的实验。在机械升速过程中,数据采集系统跟随不断升降速的转子进行采样。全程采用同样的采样频率,在转子的每个周内采样64个数据点,持续8周期,共得到512个采样点。转子转速由500 r/min匀速升到7 500 r/min,每500 r/min作为一个转速段,每个转速段中每段随机抽取一组512点采样数据,然后利用FFT方法提取采样信号的特征向量,按照上一节的方法把转子转速的0.5、1、2、3、4、5倍频的特征向量组成一个特征向量集,输入到在各种不同故障状态下的IFHMM训练,概率最大值就是对应的状态。在IFHMM中,选择收敛误差为,训练结果如图4所示。
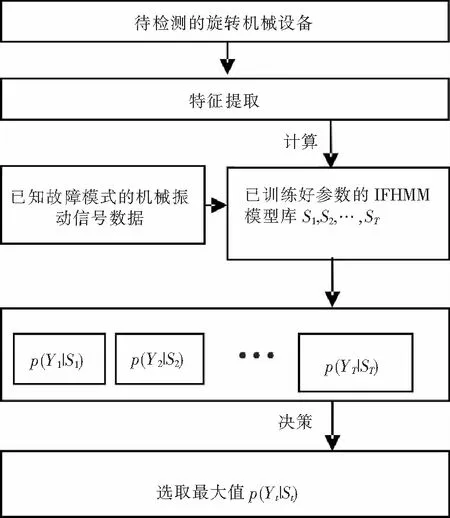
图3 基于IFHMM的机械故障诊断流程图

图4 不同故障模式下IFHMM训练曲线

ConditionModelUnblanceRubbingNormalOilwhirlPedestallooseUnblance-38.67-39.24-39.34-39.67-39.38Rubbing-39.83-39.18-39.89-39.97-39.82Normal-41.75-41.56-40.61-41.22-41.26Oilwhirl-42.53-42.03-41.46-40.71-41.58Pedestalloose-41.35-41.16-40.81-40.75-40.15
用IFHMM对转子不平衡数据训练,得到的对数似然概率值为-38.67,与其最大值接近;而将该数据输入到转子碰摩、正常状态、油膜涡动、基座松动的IFHMM模型中进行训练,得到的值分别为-39.24、-39.34、-39.67、-39.38,远小于-38.67,分类明显。对于其他故障可作类似的分析。
可见,IFHMM对5种状态下的旋转机械振动信号进行了正确地识别分类。得到了5种状态下的IFHMM模型参数。在此条件下,在5种不同的状态下启动旋转机械,分别进行10次实验。随机抽10次实验的5组数据进行判定识别。根据输出的对数似然概率得出相应的识别结果,似然概率值最大的作为对应的故障模式。实验结果如图5a~图5e所示。
可见,IFHMM能够正确进行分类,具有高效的机械故障模式识别能力。现在分别在5组状态下启动旋转机械,每一组状态进行50次实验进行识别,记录每次的识别结果,统计数据得到如表1所示。
从表格2可以看出,数据总体上能进行正确地分类识别,精度达到94%以上。因此IFHMM能对旋转机械的启动加速过程中的故障模式进行识别分类。实验表明,IFHMM在旋转机械启动加速过程中的故障模式识别和分类具有识别度高的特点。
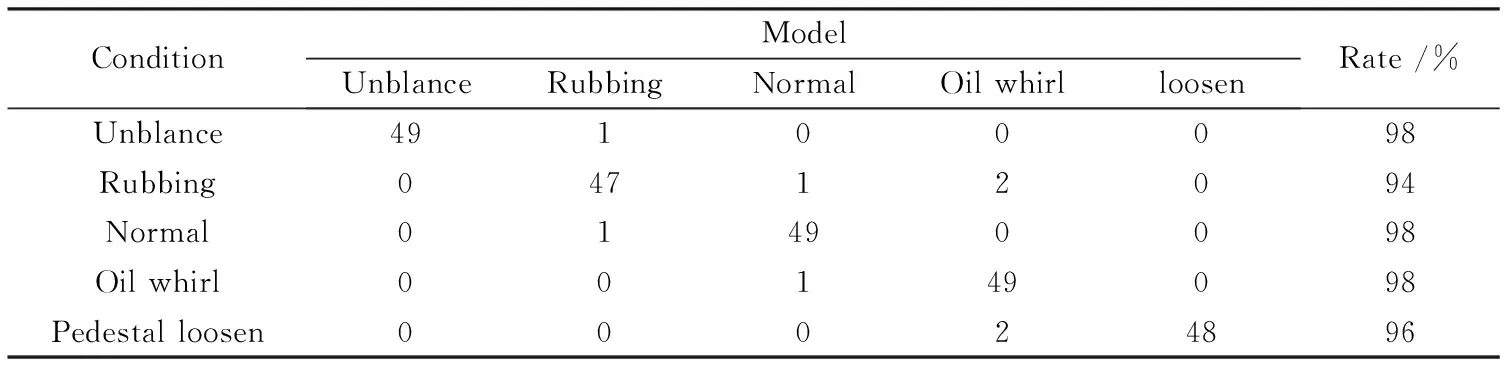
表2 5组状态启动50次统计结果

图5 旋转机械振动信号在5种状态下似然概率趋势
为了比较,还研究了基于FHMM的旋转机械故障诊断方法,得到的训练结果如图6所示,经过测试后的结果如表3。各种状态训练得到的最大对数似然估计概率用黑体标示出。

表3 经FHMM模型测试的结果
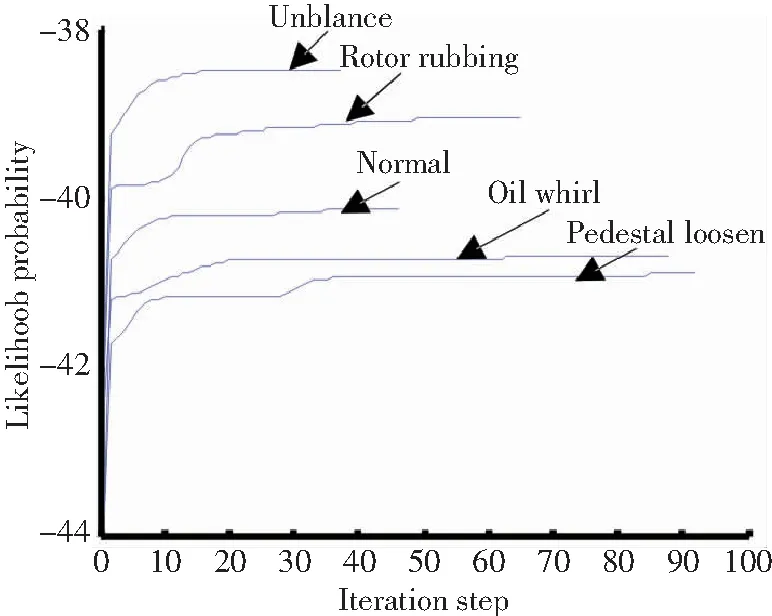
图6 不同故障模式下IFHMM训练曲线
将油膜涡动数据输入到油膜涡动状态所对应的FHMM 中训练,得到的对数似然概率值为-30.59,与其最大值很接近;而输入到转子不平衡、转轴碰摩、正常状态、基座松动的FHMM中训练,得到的值分别为-500.47、-499.54、-498.88、-500.01,远小于-30.59,分类明显。对于其他故障可作类似的分析。由图6、表3可知,经过快速Fourier变换得到的特征向量经过FHMM训练,得到的对数似然估计概率非常接近其最大似然概率,非该状态的特征向量输入到该状态的FHMM中训练,得到的值远小于其最大对数似然估计概率,模式分类效果明显。
由此可知,IFHMM识别方法和FHMM识别方法都取得了满意的识别效果。然而,这两种方法还存在差异,对比这两种识别方法,它们的特征向量是相同的,只不过识别器不同,一个采用IFHMM,一个采用FHMM,在FHMM识别方法中,需要事先指定Markov的模型参数,并且如何确定没有依据,而模型的参数选择不当很容易产生较大的识别误差。在IFHMM中的Markov链的数目不必事先指定而是自适应形成,这增加了IFHMM的适应性。
4 结论
1) 利用无限因子隐Markov模型(IFHMM)对振动信号进行模式识别过程中,似然曲线在0~10次的迭代运算步骤中已经发生明显收敛,并且在第10步骤之后曲线层次明显不再波动。正确的IFHMM识别率高达94%以上。可以看出IFHMM在旋转机械故障故障模式诊断方面具有算法稳定、收敛性好、识别度高的特点,能够对机械故障模式进行准确地分类与识别。
2) FHMM其训练曲线在第10~20次和第30次迭代运算过程中出现了波动现象,并不十分稳定,且其模型参数需要人为事先指定,而IFHMM的训练曲线一直稳定收敛,且具有模型参数自适应的特点,并不需要人为指定,具有更广泛的适用性。
[1] 李志农,曾明如,韩捷. 主分量分析和因子隐Markov模型在机械故障诊断中的应用[J]. 机械强度,2007,29(1):25-29.
[2] 童进,吴昭同,严拱标. 大型旋转机械升降速过程故障诊断HMM方法研究[J]. 机械科学与技术,1999(6):973-975.
[3] 丁启全,李志农,吴昭同. 基于因子隐Markov模型的旋转机械故障诊断方法的研究[J]. 动力工程学报,2003(4):2560-2563.
[4] 吴雅,杨叔子. 时序分析在机床上的应用技术讲座,第七讲故障诊断的时序方法(一)[J]. 制造技术与机床,1989(12):48-50.
[5] 李志农,蒋静,冯辅周,等. 基于量子粒子群优化Volterra时域核辨识的隐Markov模型识别方法[J]. 仪器仪表学报,2011,32(12):2693-2698.
[6] 冯长建,丁启全,吴昭同,等. 转子启动过程HMM故障诊断方法研究[J]. 浙江大学学报:工学版,2002,36(6):642-645.
[7] Gael J V. Bayesian nonparametric hidden markov models[J]. University of Cambridge,2012,73(1):37-57.
[8] Ghahramani Z,Jordan M I. Factorial hidden markov models[J]. Machine Learning,1997,29(2-3):245-273.
[9] Chu W,Ghahramani Z. Processes for ordinal regression[J]. Journal of Machine Learning Research,2005,6(3):1019-1041.
[10] Gael J V,Teh Y W,Ghahramani Z. The infinite factorial hidden markov model[J]. Advances in Neural Information Processing Systems,2008,11(1):1697-1704.
[11] Teh Y W,Görür D,Ghahramani Z. Stick-breaking construction for the indian buffet process[C]. International Conference on Artificial Intelligence & Statistics,2007:556-563.
[12] Wang P,Ji Q. Multi-view face tracking with factorial and switching HMM[C]. The Seventh IEEE Workshops on Application of Computer Vision,IEEE Computer Society,2005:401-406.
[13] Logan B,Moreno P. Factorial hmms for acoustic modeling[J]. Journal of Machine Learning Research,1998,6(3):1018-1061.
[14] Duh K. Jointly Labeling Multiple Sequences:A factorial HMM approach[C]// ACL 2005,Meeting of the Association for Computational Linguistics,Proceedings of the Conference,25-30,June,2005,University of Michigan,USA,2010.
[15] Griffiths T L,Ghahramani Z. Infinite latent feature models and the indian buffet process[J]. Advances in Neural Information Processing Systems,2006,18:475-482.
Fault Recognition Method of Rotating Machinery Based on Infinite Factor Hidden Markov Model
LI Zhi-nong,XIONG Jun-wei
(KeyLaboratoryofNondestructiveTesting(MinistryofEducation),NanchangHangkongUniversity,Nanchang330063,China)
In terms of mechanical fault diagnosis, factor hidden Markov model is the common tool for recognition at present. Infinite factor hidden markov model (IFHMM), which is a generalization of factor hidden markov model (FHMM), overcomes the deficiency of FHMM, i.e. chain number is often assumed. Here, IFHMM is introduced to fault diagnosis of rotating machinery, a fault diagnosis method based on IFHMM is propose, and compared with the FHMM recognition method. Finally, the proposed method had been successfully applied in the fault recognition of rotating machinery. The experiment results showed that the proposed method has obvious superior to the fault recognition method based on FHMM.
infinite factor hidden Markov model(IFHMM);pattern recognition;fault diagnosis; rotating machinery
2016年3月20日
2016年5月16日
国家自然科学基金(51265039,51261024,51075372);机械传动国家重点实验室开放基金(SKLMT-KFKT-201514);广东省数字信号与图像处理技术重点实验室(2014GDDSIPL-01)
李志农(1966年-),男,教授,博士,主要从事智能检测与信号处理等方面的研究。
TH165.3;TN911.6
A
10.3969/j.issn.1673-6214.2016.03.001
1673-6214(2016)03-0133-06
