用于机车测速的雷达传感器算法研究*
2016-12-17王东峰
李 萌, 曹 林, 王东峰
(1.北京信息科技大学 信息与通信工程学院,北京 100101;2.北京川速微波科技有限公司,北京 100080)
用于机车测速的雷达传感器算法研究*
李 萌1, 曹 林1, 王东峰2
(1.北京信息科技大学 信息与通信工程学院,北京 100101;2.北京川速微波科技有限公司,北京 100080)
用于机车测速的多普勒雷达传感器的天线波束方向与地面实际夹角随着机车的震动会发生改变,导致雷达测速传感器测量的速度值与机车实际速度存在一定偏差,双天线雷达测速传感器采用双天线结构,利用两片天线的角度关系及两片天线所接收信号的能量大小自动校正天线波束与地面夹角。通过Matlab分析数据与实际测试,角度修正后的雷达传感器系统速度测量值更接近机车真实速度。
机车测速; 雷达传感器; 双天线; 角度修正
0 引 言
雷达测速传感器采用非接触方式,利用微波信号相对于地面的速度多普勒效应[1]。因为电磁波在不同环境下的传播速度几乎不变,而且受天气影响较小,使这种方法具有很高的可靠性和稳定性[2]。但由于火车在行进过程的不断振动,使雷达天线与地面的夹角θ的大小随之发生变化,导致雷达测速传感器的准确度大大降低[3]。
文献[4]通过采用双微波模块多AD采样、不同工况下多种工作模式相互转换的设计思想以解决误差和稳定性的问题。文献[5]提出多传感器融合定位方式,适用于城市轨道交通的惯性导航系统、里程计、以及信标的组合定位方法。文献[6]通过一种基于自适应卡尔曼滤波的方法提高雷达的测速精度。
本文提出采用双天线的方式,通过角度自适应,实时地对夹角θ进行校正,降低由于机车振动引起的测量误差,提高雷达测速传感器的测速精度。
1 系统结构
机车多普勒测速雷达在实现上有两种方式,一种是天线同向,另一种是天线异向,图1所示为在机车上实验过的连续波测速雷达的系统结构框图。为了能够消除由于角度偏差所带来的测速误差,采用双天线四通道的结构,通过两部天线测出的多普勒频率fd的差异求出实际波束方向角α。雷达发射频率为24.15 GHz。系统将处理后得到的速度结果通过串口传送到计算机的控制系统。与此同时,经过校准的光电测速仪的测速测距结果也将存储在计算机内作为衡量多普勒雷达性能的参考标准。在实际应用中,考虑了采用角度自适应矫正的方法来消除由于角度偏差所引起的测速偏差。
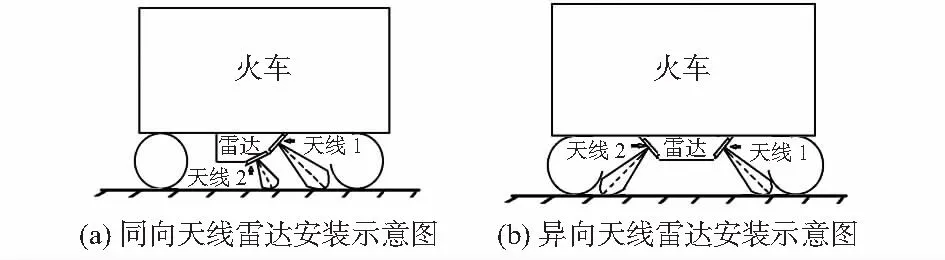
图1 系统结构框图Fig 1 Block diagram of system structure
2 角度自修正算法
雷达测速传感器的工作原理是利用多普勒效应,安装在机车上的雷达天线向地面发射固定频率的电磁波,并接收从地面反射回来的信号,由于火车处于运动状态,导致发射信号与接收信号存在一个频率差,即为多普勒频率fd,其与机车运动速度的关系式如下[4]
(1)
式中 v为机车运动速度,c为光速,f0为雷达发射频率,θ为雷达天线与地面的夹角。
2.1 以同向天线
如图1中(a)所示雷达安装后,天线1实际与地面的夹度为θ1,天线2实际与地面的夹角为θ2,由于安装在雷达上的双天线具有固定的角度差,设其为Δθ,则θ1和θ2的关系为
θ2-θ1=Δθ
(2)
两天线接收到的多普勒频移分别用fd1,fd2表示,通过式(1)可知天线1和天线2所计算的速度分别为
(3)
(4)
由于两路天线安装在同一个雷达传感器上,用于测量机车速度,理想情况下
v=v1=v2
(5)

由此可得
(6)
由式(6)可得出
(7)
(8)
因此,根据式(6)得出真实速度
(9)
2.2 当天线异向时
如图1(b)所示,其算法原理与同向天线类似,不同之处在于,两天线的角度和为定值(同向天线为角度差),即
θ1+θ2=θsum
(10)
其公式推理过程与上相似,最后可得出
(11)
对比式(9)和式(11)可知,两种雷达的公式可以通用,不同之处仅在于天线异向的雷达公式中用的是角度和θsum,而天线同向的雷达公式中用的是角度差Δθ。
3 测试与仿真分析
利用雷达样机采集大量数据,其中同向天线雷达样机的两角度差为15°,异向天线雷达样机的两角度和为90°。雷达工作周期为26.24 ms,即每26.24 ms采集一个样本数据,每个样本数据有1 024点。图2(a)为异向天线雷达时域数据样本和快速傅里叶变换(FFT)后的频域信号,图2(b)为同向天线雷达时域数据样本和FFT后的频域信号。经过大量采集数据样本,并仿真分析对比数据,可以观察到,在不考虑角度偏差时,直接根据多普勒原理计算出的速度跳变较大,不够稳定;而通过自适应修正方法修正后得出的速度相对稳定,更接近真实速度。如图3中(a),(b)所示,由图中数据可见,实验中角度修正后的速度更接近真实速度。

图2 两种雷达时域数据样本与FFT变换后的信号Fig 2 Time domain data samples of two kinds of radar andsignal after FFT transform
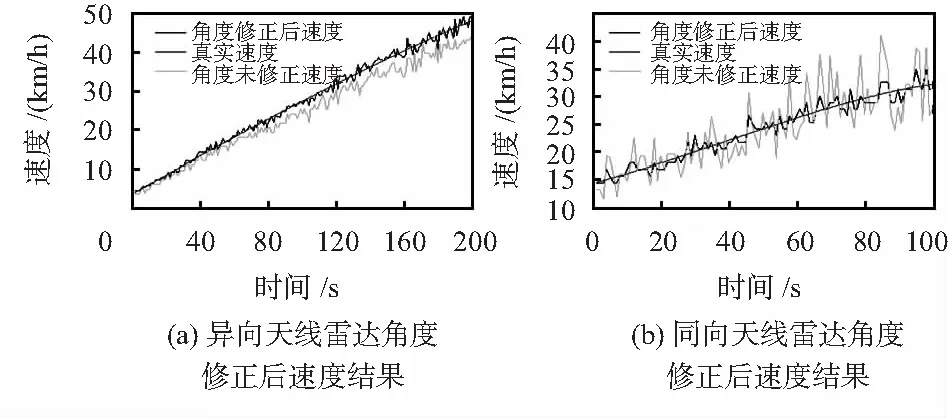
图3 两种雷达角度修正后速度对比结果Fig 3 Speed comparison results of two kinds of radarwith angle correction
同向天线雷达共有1#~4#样机,异向天线雷达有2台样机,测试时通过进行录制视频,对比统计测试结果,可知异向天线雷达的速度比同向天线雷达的速度更接近真实速度。具体统计结果见表1。
在机车测速中激光测速的精度最高,其工作在红外和可见光波段。误差在1 km/h以内,而本算法中的异向天线雷达测速误差也在1 km/h以内[6],但激光测速仪只能在静止状态下应用,不能以车载的动态模式工作,所以,无法对机车进行实时测速。

表1 同向天线雷达与异向天线雷达速度偏差对比
4 结束语
这种双天线测速的方法只需要在单天线雷达上增加一个低成本天线即可,2套天线的信号送入同一信号处理器进行检测和融合,不仅提高了测量精度,而且双天线互为冗余,提高了系统整体的可靠性。
连续波多普勒雷达测量机车速度时,天线角度偏差直接影响到了测速的精度。采用角度自修正方法,在可能出现的角度偏差范围内,能够以很小的计算量有效解决角度偏差问题。
[1] Kakuschke Chris.Numerical analysis methods of microwave Doppler signal in vehicle speed measuring in railway syste-m[D].Chemnitz:University Chemniz-Zwickau,2003.
[2] 戴 斌,高 剑,张博君,等.雷达电磁兼容试验若干问题解决方法[J].火控雷达技术,2008,3(1):101-103.
[3] 邓 超. 多传感器定位在高速铁路的应用[J]. 铁道通信信号,2006, 42 (12):28-29.
[4] 唐 伟, 孙志芳, 陈 全.基于DSP的车载雷达测速系统设计[J].自动化技术与应用,2006,25 (7):20-21.
[5] 李宏伟.雷达测速传感器及其测试系统研究[D].武汉:华中科技大学,2013.
[6] 郭华真.多传感器融合列车测速定位技术的研究[D].北京:北京交通大学,2013.
[7] 姬冰冰,买培培,苏 涛.一种基于卡尔曼滤波的机车测速雷达算法[J]. 火控雷达技术,2009,38(1):43-47.
曹 林,通讯作者,E—mail:charlin26@163.com。
Algorithm study of radar sensor for locomotive speed measuring*
LI Meng1, CAO Lin1, WANG Dong-feng2
(1.College of Information and Communication Engineering,Beijing Information Science & Technology University,Beijing 100101,China; 2.Beijing TransMicrowave Science and Technogy Company Ltd,Beijing 100080,China)
The actual angle included between antenna beam direction of radar speed sensor used for measuring speed of the locomotive and horizontal will change as the locomotive vibrations,which lead to a certain deviation between the speed value of radar sensor measuring and the actual speed of the locomotive.In order to improve the accuracy of the speed measurement values, radar speed sensor with a dual antenna can automatically correct the angle between antenna beam and horizontal.By Matlab data analysis and practical test,velocity measurement value of the radar sensor system with angle correction is closer to real locomotive speed.
locomotive speed measuring; radar sensor; dual antenna; angle correction
10.13873/J.1000—9787(2016)12—0069—03
2016—02—24
国家自然科学基金资助项目(61671069)
TN 958
A
1000—9787(2016)12—0069—03
李 萌(1990-),女,硕士研究生,研究方向为雷达传感器信号处理。
