单相缺相故障下双三相永磁同步电机矢量控制策略研究*
2016-12-13徐正喜
雷 津 耿 攀 张 平 徐正喜
(1.海军驻719所军事代表室 武汉 430064)(2.武汉第二船舶设计研究所 武汉 430064)
单相缺相故障下双三相永磁同步电机矢量控制策略研究*
雷 津1耿 攀2张 平2徐正喜2
(1.海军驻719所军事代表室 武汉 430064)(2.武汉第二船舶设计研究所 武汉 430064)
论文研究了单相缺相故障下不对称双三相永磁同步电机的矢量控制策略。从绕组解耦角度出发构造了虚拟等效的两相定子电流分量,提出了一种坐标变换的方法,有效地实现了不对称电机系统向对称电机系统的变换,实现了不对称三相电机的解耦控制问题,在控制上获得与直流他励电动机性能相似的结果。通过进行仿真,认为该策略使得双三相电机在运行的过程中电磁转矩脉动的问题能够有效减小,实现虚拟磁场定向解耦控制。
双三相永磁同步电机; 不对称绕组; 坐标变换; 解耦控制
Class Number TM301
1 引言
与传统的三相电机驱动相比,双三相电机驱动系统优势明显,其可靠性极高,冗余度较大。当出现了一个或者是多个定子绕组损失时,对性能要求不高的情况下其还能够连续运行。因此,对三相电机在故障运行状态下的容错控制方法进行研究,能够有效地发挥双三相电机的优良性能,意义非常重大[1~2]。双三相电机故障后的容错控制之一是对故障后剩余相的电流幅值以及相位进行调整,进而使得故障前后的定子绕组产生完全一样的瞬时磁动势,有效地实现磁势的补偿控制[1,3]。此方法在改善调速系统的性能方面起到了关键作用,但是存在一定缺陷,其没有对故障后电机的电磁参数改变进行考虑,导致控制性能严重下降。当在不对称组结构情况下,如何有效地实现对解耦控制,使得双三相永磁同步电机的可靠性有明显提高,将具有非常重要的意义[4]。
本文通过对旋转坐标变换进行改进,有效地解决了在单相缺相故障的双三相永磁电机的不对称问题,真正地实现解耦控制和矢量控制。
2 单相缺相时两相静止坐标系下的电机模型
本文以双三相电机F相缺相故障为例进行分析。

(1)
上式满足αβT=0。
对于定子磁势来说,其分布是根据正弦规律分布,剩余的五相绕组的总磁势等于两相绕组总磁势时,在α-β轴上的,两套绕组瞬时磁势应该具有相等的投影[6~7],因此有:
(2)
在进行坐标变换时,磁动势以及功率不发生变化,据此原则,进行坐标系间变换时,矩阵必须为单位正交矩阵。首先,在αβ二相系统上添加正交零序分量3个,令z1、z2、z3为其正交变换矢量,根据下式获得[1,3,8]:
(3)
把式(1)和由式(3)解得的五个正交向量单位化,得到如下的单位正交矩阵:
(4)
则其对应的逆矩阵为[2~3]
(5)
(6)
五相自然坐标系下不对称双三相电机方程为
(7)

(8)
记Lsα=3Lms+Lls,Lsφ=2Lms+Lls。
则有
(9)
(10)
通过以上分析可知,F相断相时双三相永磁电机,在机电能量相关的α-β子平面中,其不是一个对称的二相电机,但是对于z1-z2-z3子平面,其是零平面,且与α-β子平面正交[2~4,9]。
此时,双三相电机将不具备对称性,传统的旋转坐标变换将不再适用,不能对其进行解耦,即不能对其进行矢量控制[9~11]。要想对其进行坐标变换,需要进行改进,得到新的dq坐标系下的解耦的电机方程,进而有效的实现矢量控制。
3 改进旋转坐标系下的双三相电机矢量控制模型

将等效αβ绕组匝数以及定子磁动势αβ轴分量分别设为N1和N2以及Fα和Fβ,则:
(11)
设同步旋转坐标系,定子绕组磁动势dq轴分量分别为Fd和Fq,则[5~6]:

(12)
实际上,定子绕组的匝数比即为对应轴互感之比。即:
(13)
故有:
(14)
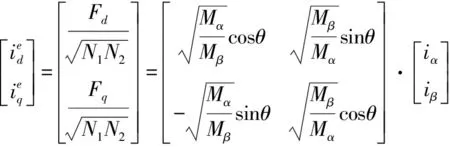
(15)
上式实现了对新型旋转坐标变换的构造,如图1所示。上述的坐标变换方法有效地保证了变换前后定子磁势的等效,使得不对称绕组的对称化有效地实现,从而实现不对称绕组解耦控制。
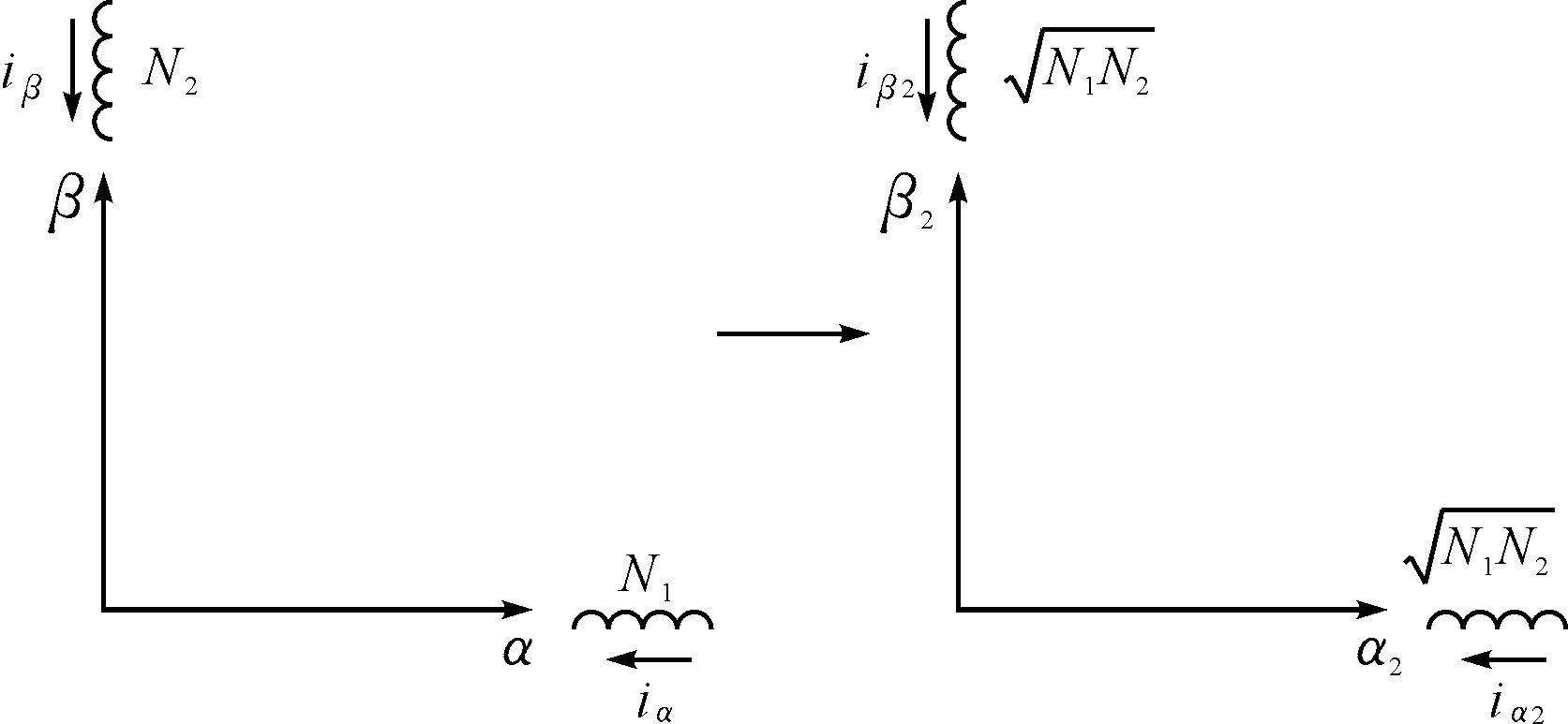
图1 绕组不对称时的绕组等效对称变换图
(16)
扩展为5阶矩阵得:
(17)
则有:
(18)
记Ld5=3Lms,Lq5=2Lms
通过对上述进行分析得改进后的同步旋转坐标下的发生F相单相开路的电机电磁模型:
(19)
控制isd=0时,上式可简化为
(20)
在上式中,当永磁体磁链ψf以及极对数np不变时,仍然能够实现对双三相电机的解耦控制瞬时值进行控制,就能够实现不对称双三相永磁同步电机电磁转矩的瞬时控制[11~12]。
其控制框图如图2所示。

图2 优化的不对称双三相电机矢量控制框图

永磁体磁链d轴电感q轴电感漏感定子电阻极对数额定转矩额定转速转动惯量0.175Wb8.5mH5.87mH0.6mH1Ω317.5N.m300rpm0.089kg∗m2
4 仿真验证与结果分析
在本节,仿真研究了上节所改进的基于旋转坐标变换的不对称双三相电机磁场定向控制。在进行仿真的过程中,电流的采取滞环控制,在0.2s时,F相缺相故障发生,0.2s以后将本文所提出的优化矢量控制策略应用其中。不对称双三相永磁电机的仿真参数如表1所示。
图3是将不对称双三相电机矢量控制进行优化以后,其稳态运行状态图,在图中,由上到下,依次对六相电压、电流以及电机转速和电磁转矩波形进行分析。对于每幅图,都包含了三种不同的运行状态, 0~0.2s,无故障的双三相永磁电机基于电流滞环的矢量控制运行状态;而后的0.2s,是F相缺相故障下电机系统未采用优化的控制策略时的系统运行状态;0.4s~0.6s是采用了本文提出的故障下优化的矢量控制策略的电机系统运行状态。从图中可以看出,本文提出的不对称双三相电机优化策略下的电机电磁转矩脉动约为3N·m,比正常的脉动分量稍大,但是与优化前的单相缺相故障的转矩脉动相比明显减少。此策略使得单相缺相故障有效减少,使得电机运行状态更加稳定。通过对其进行优化,使得不对称电机的定子绕组电流基本与故障前保持一致,但是有效增加了相电压幅值,使得F缺相所导致的功率损失得到有效补偿,从而保持系统运行状态的稳定。通过上分析,能够看出在本文所提出的缺相故障下的双三相永磁同步电机的改进同步旋转坐标变换方法,能够使得不对称绕组的解耦控制有效实现。当双三相电机发生单相缺相故障时依然具备直流他励电机的优良控制特性。

图3 不对称双三相电机矢量控制稳态运行状态图
5 结语
本文对F相缺相时的双三相永磁电机的电机模型进行了研究,通过公式推导,提出了基于虚拟定子电流分量的双同步旋转坐标系控制策略。该策略通过建立虚拟的同步旋转坐标系,实现对不对称双三相永磁同步电机系统的解耦,使得其成为对称的电机系统,从而实现了电机两套虚拟同步旋转坐标分量之间独立的线性控制。仿真研究表明,本文研究的改进方法有效地实现了不对称绕组的解耦控制,稳定电机转速,抑制电磁转矩的脉动,保持不对称双三相电机的稳定运行。
[1] Jen-Ren F, Lipo T A. Disturbance-free operation of a multiphase current-regulated motor drive with an opened phase[J]. IEEE Transactions on Industry Applications,1994,30(5):1267-1274.
[2] Zhao Y, Lipo T A. Modeling and Control of A Multi-Phase Induction Machine with Structural Unbalance Part I-Machine Modeling and Multi-Dimensional Current Regulation [J]. IEEE Transactions on Energy Conversion,1996,11(3):570-577.
[3] Zhao Y, Lipo T A. Modeling and Control of A Multi-Phase Induction Machine with Structural Unbalance Part II-Field-Oriented Control and Experimental Verification [J]. IEEE Transactions on Energy Conversion,1996,11(3):578-584.
[4] Yifan Zhao, Thomas A. Lipo. Vector PWM Control of Dual Three Phase Induction Machine Using Vector Space Decomposition [J], IEEE Transactions on Industry Applications,1995,31(5):1100-1109.
[5] Betin F, Capolino G A. Shaft Positioning for Six-Phase Induction Machines With Open Phases Using Variable Structure Control[J]. IEEE Transactions on Industrial Electronics,2012,59(6):2612-2620.
[6] 张平.双三相电机矢量控制及容错控制策略研究[D].杭州:浙江大学,2014.
[7] 欧阳红林.多相永磁同步电动机调速系统控制方法的研究[D].长沙:湖南大学,2005.
[8] 周马山.基于DSP的多相永磁同步电机矢量控制系统[D].长沙:湖南大学,2010.
[9] 李山.多相感应电机控制技术的研究[D].重庆:重庆大学,2009.
[10] 周马山, 欧阳红林, 童调生.不对称多相 PMSM 的矢量控制[J]. 电工技术学报,2004,19(12):37-41.
[11] 张平,耿攀,杨文铁,等.船舶电力推进双三相永磁同步电机电流控制策略研究[J].船电技术,2014,34(12):60-63.
[12] Hyung-Min R, Ji-Woong K, Seung-Ki S. Synchronous-frame current control of multiphase synchronous motor under asymmetric fault condition due to open phases[J].IEEE Transactions on Industry Applications,2006,42(4):1062-1070.
Vector Control of DTP-PMSM with Missing Phase
LEI Jin1GENG Pan2ZHANG Ping2XU Zhengxi2
(1.Naval Representive Office in 719 Institute, Wuhan 430064)(2.Wuhan Second Ship Design and Research Institute, Wuhan 430064)
In this paper, single-phase phase vector asymmetric double fault phase permanent magnet synchronous motor control is studied. Decoupled from winding angle construct virtual equivalent of two-phase stator current component a method of coordinate transformation is proposed, the transformation of asymmetric motor system to symmetrical motor system is achieved, the three-phase asymmetry decoupling motor control problems are implemented effectively, him excited DC motor performance similar results are gotten in the control. Through simulation, that the policy making process in the two-phase motor running problem of electromagnetic torque ripple can be effectively reduced, virtual flux orientated decoupling control is realized.
dual three-phase permanent magnet synchronous motor, asymmetric winding, rotating coordinate transformation, winding decomposition control
2016年5月13日,
2016年6月21日
雷津,男,硕士,高级工程师,研究方向:船舶电气。耿攀,男,硕士,高级工程师,研究方向:船舶电力系统、电力电子技术和电磁场防护。张平,男,硕士,工程师,研究方向:船舶电电力电子技术和电磁场防护。徐正喜,男,硕士,研究员,研究方向:船舶电电力电子技术和电磁场防护。
TM301
10.3969/j.issn.1672-9730.2016.11.037
