基于DSP三相异步电动机矢量变换控制系统构建
2016-12-08陈炳文林若波黄锦钿
陈炳文,林若波,黄锦钿
(揭阳职业技术学院机电工程系,广东 揭阳 522000)
汽车电子
基于DSP三相异步电动机矢量变换控制系统构建
陈炳文,林若波,黄锦钿
(揭阳职业技术学院机电工程系,广东 揭阳 522000)
针对异步电动机的矢量控制原理和SVPWM技术,以16位DSP芯片TMS320F2812为核心,构建了基于异步电动机矢量控制的变频调速系统,描述了各硬件功能单元的组成结构和设计,运用异步电动机的矢量控制,实现变频调速。
异步电动机;DSP;矢量控制;变频调速
10.16638/j.cnki.1671-7988.2016.11.034
CLC NO.: U463 Document Code: A Article ID: 1671-7988(2016)11-92-03
随着微处理技术和电力电子技术、现代控制理论的不断发展,矢量控制技术以其控制精度高,低频特性好,转矩响应快等优点,在机电控制技术中受到推广。三相异步电动机的参数系统包括:变量多、耦合强及变化的非线性,可以选择转子磁通作为参考坐标,运用数学中的坐标变换原理,可将电机中的定子电流分为两个分量来控制:即励磁分量和转矩分量。
在电机的矢量控制技术中,可运用SVPWM调制方法,将逆变器和三相电机组成一个系统,通过TMS320F2812电机专用控制芯片控制,设计出三相异步电动机的矢量控制系统方案,通过相关数据的测试及运行情况,证明方案的可行性。
1、异步电动机矢量控制方法
1.1运用数学模型建立矢量,实现矢量的控制
在矢量控制中,运用电机中的解耦控制理论基础,建立坐标系,运用正交方法,将磁场分量id、转矩分量iq从三相异步电动中的定子电流中分解出来,可得到转矩:

从上式中可见,在三相异步电动机的矢量控制过程中,完全可用id、iq来实现对电机定子电流的控制,具体的解耦过程可由变换坐标的方法来分析。
在矢量变换坐标系中,ia、 ib、 ic是分别从三相电机定子电流中分解出来的三个矢量,运用磁场的等效原理,将之转换为两个正交分量id、iq,并得到其转换矩阵的表达式VR为:
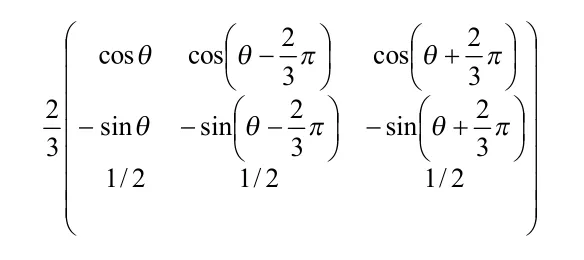
其反变换矩阵VR-1:

从上式中可以看出,实现旋转坐标的两个正交分量id、 iq能从静止坐标系中的三相电流ia、ib、ic实现等效变换,并且id和iq是互相解耦的,从而实现三相电机的解耦控制。
在新的d-q-o的坐标系中,可得到三相异步电动机的状态方程和转矩表示式。
若在新的d-q-o的坐标系中,两组绕组互为正交,其中一组用来等效三相电机的定子绕组,另一组用来等效三相转子绕组。
定子两相正交绕组的轴线位置为d1-q1,转子两相正交绕组的轴线位置为d2-q2;且在空间位置上,d1-q1与d2-q2始终重合。
在d-q-o旋转坐标系中,电机的磁链、电机的电压、电机的输出转矩可分别表示为:
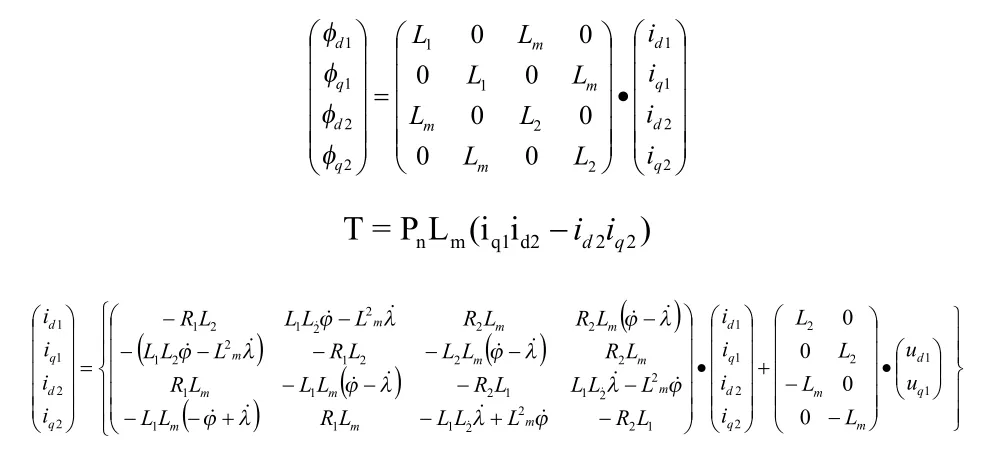
在d-q-o旋转坐标系中,要求以定子电流和转子磁链为变量来确定电机电磁转矩的,其状态方程可表示为:

相应的电机转矩表达式为:

如果在一定情况下,能够同步旋转坐标系d-q-o与转子磁链,把d轴定位在转子磁链上,则可把坐标系d-q进行转化,变为M-T转子磁链坐标系,于是,在新的M-T坐标系中,电机磁链及转矩的方程可表示为:

式中:

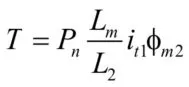
由此可知,要实现磁场电流分量与转矩电流分量两者的解耦,必需选择好磁链的空间矢量方向,作为M轴方向,并且使其幅值不变,从而实现转矩的转子电流it1控制T。
1.2建立矢量控制系统
根据电机的控制理论,建立矢量控制系统,其控制过程为:励磁电流给定值---电机转速反馈与给定转速比较--转矩信号输出--三相电流坐标变换--解耦。
经解耦后的励磁电流与实际励磁电流,送到pi调节器与转矩信号给定值与实际转矩电流进行比较,进行变换后,得到Ua和Uβ的两相矢量调制信号,运用SVPWM技术的算法,得出PWM脉冲调制信号,用以驱动控制逆变器的功率开关器件,完成了异步电动机转矩的控制。

图1
1.3SVPWM的工作原理
电压空间矢量PWM技术是电机磁链圆形轨迹与SPWM技术直接结合,直接从电动机角度出发,以电动机磁链圆形轨迹控制为目的,该方法不仅在控制上与SPWM的效果相同,可操作性强,效果明显。
SVPWM调制方法是利用交替使用不同的电压空间矢量, 并由两个零矢量和六个基本电压矢量合成实现的,参考矢量合成规则是:由当前参考矢量所在扇区的两个电压矢量分别作用一定时间合成所得。在参考矢量的旋转频率补偿上,可在设计时插入零矢量。
2、矢量控制系统硬件的组成
矢量控制系统可由三个部分组成:系统控制与运算模块、功率变换模块、检测采样模块。
采用TI公司的电机专用的控制与运算模块:16位DSP控制芯片TMS320F2812为核心,用以实现采样调理、矢量控制及SVPWM调制算法等。计算出三相电机的转速、定子的各相电流和磁场的相对位置,再通过矢量控制算法,得到模块的电压空间矢量PW信号,这样的信号经功率进行放大后,经过驱动IGBT开关器件处理,同时在采样过程中加入软件滤波和信号采样错误处理。此外,在该控制系统中增加辅助电路:隔离开关电源、PWM驱动电路、转速转矩传感器以及霍尔电流传感器等,设置开关电源,为整个控制电路提供多路隔离电源,矢量控制系统硬件框图如图2所示。
功率变换模块完成功率的变换任务,并由不可控整流电路、中间直流电容滤波器和IGBT模块封装逆变器等构成。
检测采样模块则由三相电机中的电流采样和电压采样,送调理电路进行比较,完成信号的校正工作。

图2 控制系统总体框图
3、矢量变换控制系统软件组成
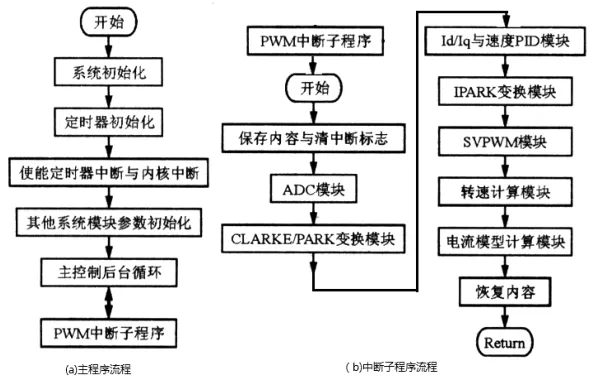
图3 系统主要程序控制图
控制系统软件主要分为两部分:一是控制系统主程序,包括系统初始化、定时器初始化、定时器下溢中断与CPU中断、其它系统模块参数初始化等;二是中断子程序,包括ADC模块、CLARKE/PARK变换模块、Id/Iq与速度PID模块、PARK逆变模块、SVPWM模块、速度计算模块、电机电流模型计算模块等。整个系统软件的总体结构如图3所示。
4、系统调试结果
在软硬件设计后,构建了实验装置,对矢量控制及SVPWM系统进行实验研究,通过系统调试对上述矢量控制算法进行实验验证。
系统测试参数如下:电机为4极三相异步电机,额定参数值为:PN=5kW,UN=220V,IN=7.5A,f=50 Hz,n=1500 r /min。
IGBT的开关频率为1.2kHz,死区为5.4μs。当给定转速为0.9倍的基准转速时,设置开关频率为1 .2kHz,小负载状态下运行。 将DSP的PWM1输出引脚外接一个RC低通滤波器,图4显示出观察到的SVPWM控制信号及逆变器输出线电压、相电流波形。相电流几乎为正弦波,该实验结果显示,该控制系统具有良好的动态和静态特性。表明控制策略达到了理想的效果。

图4 实验波形
以TI公司的电机控制专用DSP芯片TMS320F2812为基础,利用DSP芯片的运算能力和快速处理能力,采用基于转子磁场定向控制和SVPWM调制技术,构建了一种异步电机矢量控制系统,并通过系统的调试,结果表明了该控制算法的正确性和有效性,对三相交流异步电动机的研究有一定的实用价值。
[1]王成元.夏加宽.电机现代控制技术[M].机械工业出版社.2006.
[2]何伟. 异步电机矢量控制的检测及参数辨识[D]. 南昌:南昌大学学报,2013.
[3]朱军,朱政.转差频率矢量控制的电机调速系统设计与研究[J].现代电子技术,2010,(20):331.
[4]李畸勇. 基于DPS 的间接矢量控制系统的研究[D]. 成都:西南交通大学学报,2002.
[5]阮毅,陈维钧. 运动控制系统[ M]. 北京:清华大学出版社,2006.
[6]周渊深,陈涛,朱希荣. 电力拖动自动化控制系统[M]. 北京.
Three-phase Asynchronous Motor Vector Transformation Control System Builts Based on DSP
Chen Bingwen, Lin Ruobo, Huang Jintian
( Department of mechanical and electrical engineering, Jieyang vocational and technical college, Guangdong Jieyang 522000 )
In view of the asynchronous motor vector control principle and SVPWM technology, with 16 bits DSP chip TMS320F2812 as the core, the variable frequency speed regulation system based on asynchronous motor vector control is built. It describes the structure and design of each function of the hardware unit using asynchronous motor vector control and frequency control of motor speed.
Asynchronous Motor; DSP; Vector Control; Frequency Control of Motor Speed
U463
A
1671-7988(2016)11-92-03
陈炳文(1969-),男,广东揭阳人,高级实验师,研究方向为机电一体化控制技术。
揭阳市科技计划项目(基于DSP的异步电动机矢量变换控制系统研究,项目编号201408)。