MMC结构的控制系统软硬件设计
2016-12-07马勤冬李春来张敏吉凌志斌
马勤冬, 李春来, 张敏吉, 凌志斌
(1.上海交通大学 电气工程系, 上海 200240; 2.国网青海省电力公司科学研究院,青海 西宁 810000;3.中海油研究总院, 北京 100028)
MMC结构的控制系统软硬件设计
马勤冬1, 李春来2, 张敏吉3, 凌志斌1
(1.上海交通大学 电气工程系, 上海 200240; 2.国网青海省电力公司科学研究院,青海 西宁 810000;3.中海油研究总院, 北京 100028)
模块化多电平变换(Modular Multilevel Converter, MMC)技术以良好的可扩展性、高度模块化和良好电压输出特性正逐渐被推广应用到中高压、大容量电力变换领域。文章首先介绍了MMC技术的主要拓扑结构及其技术特点;然后针对结构特点,提出了以双核微处理器+FPGA为主控制器、以CPLD为从控制器的两级控制系统架构,分别就软硬件设计作了阐述;在实验室的样机验证了控制系统的合理性。
MMC;控制系统;主从分层;级联扩展;高速通信;软硬件设计
0 引 言
自2002年模块化多电平变流器(Modular Multilevel Conversion,MMC)的概念和拓扑首次提出后[1],因其良好的电能质量输出、器件耐压低、高度模块化等特点被广泛用于大容量、中高压电力变换场合,如柔性直流输电、高压变频、大容量电池储能等领域。
目前国内外对于MMC结构变流器的研究主要集中在MMC主电路参数设计及其建模仿真[2-3]、MMC环流分析及其抑制策略[4-5]、MMC子模块均衡控制策略[6]、脉冲调制技术研究[7]、MMC冗余控制及故障保护[8]等方面,而其数字化控制系统是以上研究成果得以实现的前提,因此针对MMC结构的特点,设计合理的控制系统架构就显得尤为重要。
MMC结构的模块化程度高,为了便于扩展,除了采用微处理器+FPGA模式作为主控制器以实现复杂信号处理和算法计算等功能外,每个模块化的MMC子模块的控制、检测、保护等功能也必不可少,因此对每个子模块再设计一个小型的从控制器以实现上述功能,既可以将控制系统复杂度降低,也可以使主、从控制器的开发设计并行展开,提高研发效率。根据实际功能的复杂程度,从控制器可以采用微控制器或者复杂可编程器件(Complex Programmable Logic Devices, CPLD)。鉴于此,本文提出了以TI公司双核处理器Concerto F28M3x + Altera公司 FPGA芯片Cyclone EP4CE30x为主控制器、以Microsemi公司CPLD芯片ProASIC3 A3P060为从控制器的两级控制架构。
1 模块化多电平变流器结构

图1 MMC拓扑图
本文探讨的控制系统针对的MMC系统结构如图1所示,它具有交、直流两个对外接口,可分别接入直流网络、交流网络。图1中,MMC子模块由电力电子开关器件、电容和电池组成。N个相同的子模块(Sub-module, SM)和一个电感可串联成一个桥臂,三相MMC系统由6个桥臂对称连接而成,每相各上、下两个桥臂。
图1所示MMC系统的目标就是通过控制每个子模块开关器件的导通或者关闭使交流接口处的电压波形无限地接近正弦波。显然,当N越大时,逼近的效果越好;反之越差。
通过调制技术在交流接口产生需要的电压波形,采用的多电平调制技术应该具备调制波逼近能力良好、开关频率尽可能小、响应能力尽可能快等特点。目前应用在多电平领域的调制方法较多,以载波移相(Carrier Phase Shift PWM,CPS-PWM)和载波层叠(Level Shift PWM,LS-PWM)两项技术最为广泛。CPS-PWM调制技术具有可扩展性、均衡效果良好等优势,故本文选择CPS-PWM调制技术作为MMC系统的调制策略,相关原理见文献[9-10]。
2 MMC结构控制系统软硬件设计
2.1 两级控制架构
图2所示为本文采用的MMC结构两级控制系统架构示意图。其中的主控制器主要完成与PC机等终端的人机交互,实时采集MMC系统的运行参数进行控制目标算法计算并将计算出的调制信号传递给FPGA,FPGA在完成载波移相调制后把子模块的开关控制信号下发给从控制器;另一方面,从控制器则采集本地子模块的电压、温度、故障等信息后上传给FPGA,FPGA将所有从控制器上传的信息打包处理后传递给MCU,以完成进一步的处理。
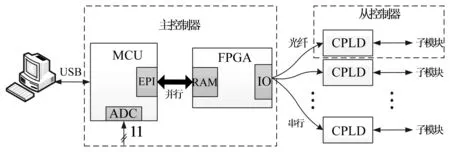
图2 MMC结构两级控制系统架构
2.2 主控制器设计
MMC结构主要应用在中高压、大容量电力变换场合,因此它的主控制系统必须具备以下功能:
(1) 具备多路模数转换(Analog to Digital Conversion, 简称ADC)通道或者能够将外部ADC转换结果传递给控制器以进行算法处理。图1所示的拓扑结构,至少需要采集三相上下桥臂电流、交流接口电压、直流接口电压及电流等11个模拟信号,且ADC转换精度和转换时间也必须满足实时控制的要求。如果主控制器使用的MCU自带ADC外设,就要求其至少有11路ADC输入通道,否则就必须增加额外设计;如果采用专用ADC电路先采样再将采样结果传递给MCU,这就要求MCU与专用采样电路之间有高速总线来完成数据交互。
(2) 具备丰富人机界面交互接口。整个MMC拓扑结构中,有许多关键的监控信号需要实时传递到以PC机为代表的上位机终端,以更友好的方式进行人机交互。特别是随着子模块数量的递增,需要传递的数据量会很可观,因此主控制器具备吞吐量大、传输快延时小的交互接口必不可少。
(3) CPU支持快速浮点运算。不管是变流器进行功率控制时,还是ADC转换结果与实际量之间的转换,都会涉及到大量复杂的数学运算,这就对控制器CPU的浮点运算能力提出了较高的要求。
(4) MCU与FPGA之间有高效的数据交互通道。通常MCU不能满足MMC结构子模块数量增加带来的对IO资源的需求,FPGA成为扩展IO资源的首选,因此MCU与FPGA之间实时数据交互能力是衡量整体系统的关键因素。
出于以上考虑,本文选择了TI公司的一款双核MCU——F28M35H52C1,它将 ARM Cortex-M3内核与 C28x 内核结合到一个器件之上,实现了连接和控制一体化。该MCU集成了ARM M3处理器在通信连接领域的优势和TI公司久经市场考验的C28x系列处理器在电机、电力控制领域的优势,可满足上述四点要求,更为进一步功能扩展预留了足够空间。具体来说,就是利用该MCU的M3内核的USB、10/100以太网等接口完成与PC端的人机交互, C28x内核完成复杂的浮点运算,20通道12位高精度ADC转换器实现模拟量数字化,外设扩展接口(External Peripheral Interface, EPI)实现与FPGA之间的并行数据交互,而M3内核与C28x内核之间的信息交互则通过芯片内部的可配置多功能RAM来实现。主控制器的MCU与FPAG之间在通信时采用的是并行数据传输,MCU可以利数据总线和地址总线,为了匹配,在FPGA内部需要构建双口RAM,以实现二者之间的高速数据交互。在兼顾IO资源与内部RAM资源的基础上,本文的FPGA芯片选择了Altera公司的Cyclone EP4CE30F23C7。
主控制设计的关键在于合理安排好各个环节之间的衔接时序,以使各个环节充分发挥优势,本文主控制的时序如图3所示,其中深色背景是可能触发的流程。在每一个计算周期到来时,C28x内核需要根据当前ADC采样结果,根据功率控制的相关算法,求出三相MMC系统的调制信号。一旦计算完成,就可触发MCU内部的DMA访问接口,将调制信号发送给FPGA。FPGA接收到MCU传来的调制信号后,在恰当时刻刷新调制信号,并在完成比较时刻建立与从控制器的通信,经过上述步骤后即可将C28x内核计算出的调制信号反应到子模块的开关器件。与此同时,FPGA可将上一个周期采集打包好的子模块信息集中发回给MCU,以供MCU进一步处理,至此就完成一轮计算周期的主要任务。在整个计算周期内,M3和C28x内核会利用空闲时间,响应PC的各种服务请求,以及处理一些诸如监控、信息刷新等必要辅助功能。
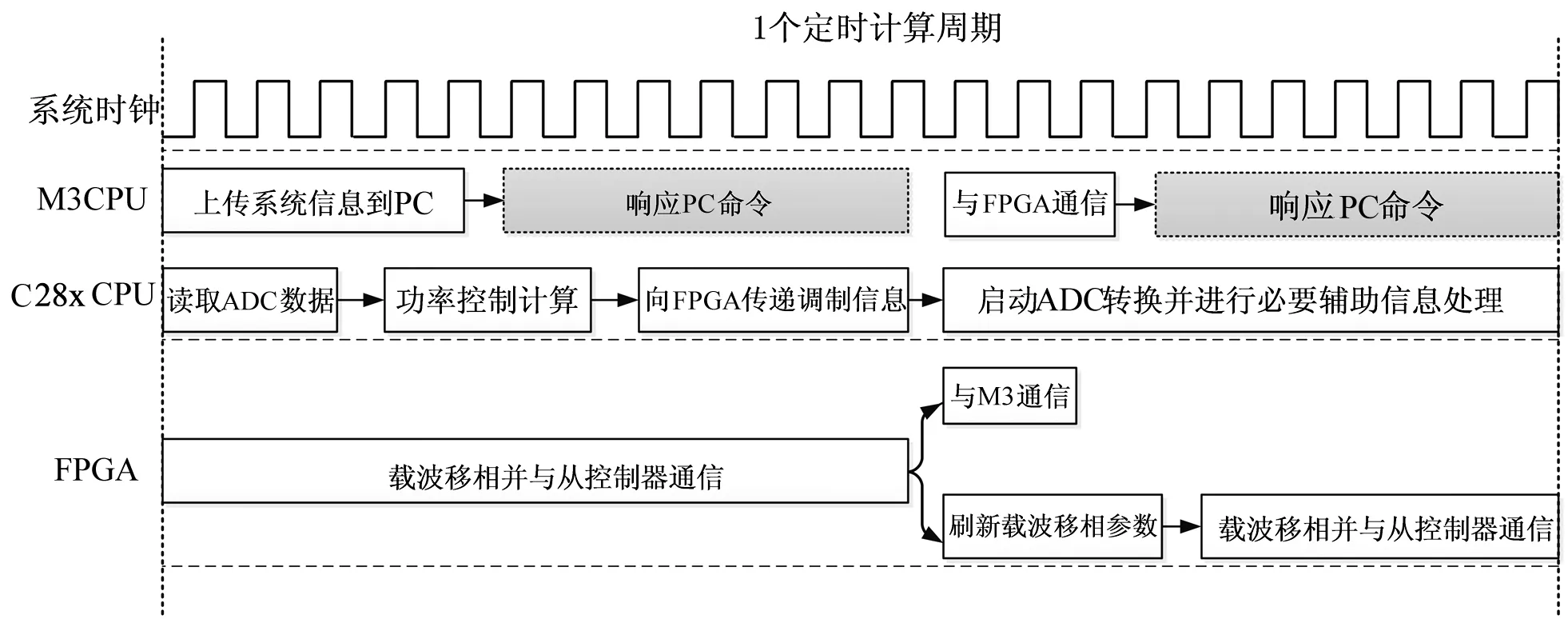
图3 主控制器任务时序图
2.3 主从控制器之间通信
如图2所示,载波移相调制技术的关键在于,每次调制信号与载波信号相交时,开关信号发生反转,上一开关状态为关闭的开关器件需要改变为开通状态,上一状态为开通的需要改变为关闭。
由于将载波移相调制功能放到了主控制器的FPGA来实现,因此主控制器仅需要在每次开关信号变化时把新的开关信号下发给从控制器即可。从实时控制的角度来说,自FPGA得出新的开关信号到从控制器响应为新的开关状态,期间时间间隔应该尽可能的缩小。另一方面,尽管由主控制器发给从控制器的数据量很少,只有开关信号,但是由从控制器上传给主控制器FPGA的数据量则较大,且应该具备扩容能力。本文借鉴通用异步传输收发器(Universal Asynchronous Receiver/Transmitter, UART)机理,利用FPGA/CPLD的硬件可编程优势,设计了比特率为11 Mbps的高速UART,既满足了通信的及时稳定要求,又为将来的功能扩展预留充足空间。
UART最为关键的是对于RX起始信号的判断,如果这一判断失误,后续的异步比特流采样也就不可能正确。本次设计时,采用主控制器主动发起一个电平由高变低并维持足够长时间后拉高作为“同步信号”。从控制器上电工作时,默认没有“同步”,就不会对RX接收信号进行采样。而当接收到规定的“同步信号”,从控制器就会让本地的发送端TX变低并维持一段时间后拉高,这样主控制器就认为与从控制器建立了可靠通信,而从控制器也进入准备采样RX信号状态,主、从控制器之间即可按照如图4所示的流程进行通信。

图4 高速UART原理图
2.4 从控制器设计
从控制器是直接控制MMC子模块开关器件的底层控制器,它将主控制器下发的控制命令经过内部验证后如实、及时地反应到子模块的开关器件上。它需要在恶劣的环境中可靠工作,并具有必要的故障保护功能,否则大功率运行时,很容易对MMC子模块造成损坏,也可能引发更严重的事故。另一方面,也需要依靠从控制器将MMC子模块运行状态信息实时、准确地上传给主控制器,以供主控制器根据子模块的即时状态做出正确的反应。
一般来说,就本文讨论的应用场景而言,中低端CPLD和低性能的单片机都能满足需求,在综合稳定性及成本因素后,本文选择了Microsemi公司的基于Flash技术的A3P060 CPLD芯片作为MMC从控制器的控制核心。电力电子开关器件的驱动信号需要足够的驱动能力,而从CPLD芯片管脚出来的开关信号驱动能力相当有限,因此开关信号的驱动放大电路是可靠控制子模块的决定因素。当前市场上的众多半导体公司都有比较成熟的驱动芯片或模块,如IR公司IR2110芯片、CONCEPT公司的2SC0435T2A0模块等,根据选用的开关器件,选择合适的驱动芯片基本都可以胜任。
如前分析,从控制器主要包含与主控制器通信、通信指令解码、更新开关信号、故障监测与保护、状态信息采集与上传等功能,图5为从控制器在一个开关信号更新周期内的功能时序图。在一个开关信号更新周期内,从控制器收到主控制器下发的控制指令后,先进行内部解码再将获得的开关信号作死区延时处理后发送给外部的开关器件驱动电路,完成一次开关器件状态更新。同时进行的是,从控制器实时检测子模块的故障信息,尤以过流故障为重,一旦检测到故障,需根据预先设计的方案及时作出反应,本次设计的处理方法是立即封锁开关信号,并立即触发一次与主控制器的上传通信,以将故障信息及时上传,以便于主控制器及时采取措施,防止故障进一步扩大。
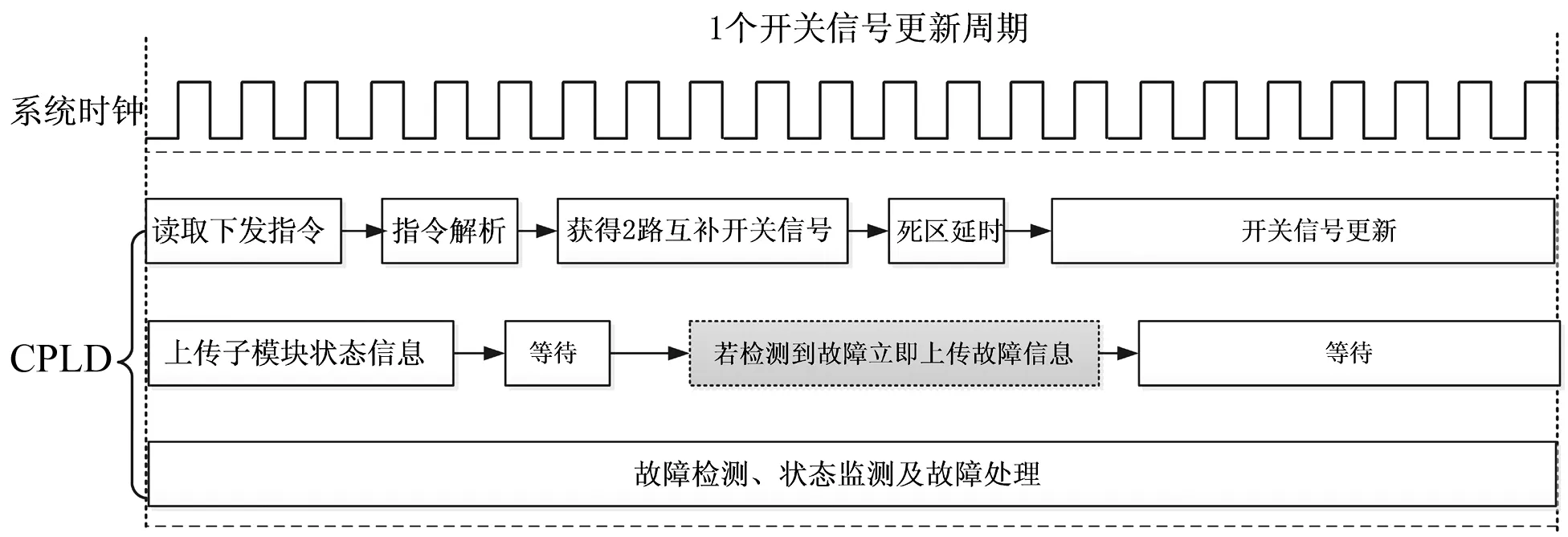
图5 从控制器任务时序图
3 实验验证
3.1 实验平台
为了验证本文所提探讨的MMC控制系统有效性,在实验室按图1所示主电路结构搭建了一个MMC小型样机,表1为该样机系统的主要规格参数,样机系统采用的主、从控制系统实物分别如图6、图7所示。
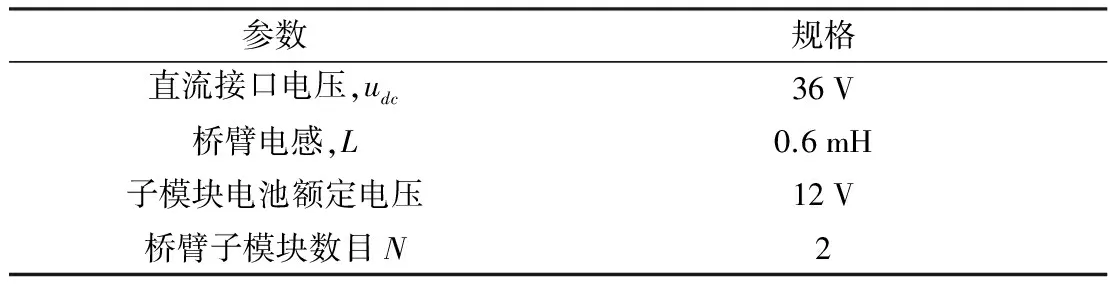
表1 MMC样机实验平台参数

图6 主控制器实物图

图7 从控制器实物图
3.2 实验结果
在主控制器选择频率为50 Hz的标准三相正弦波作为调制信号,用示波器测试得到的单一子模块的输出电压波形如图8所示,MMC交流接口线电压波形如图9所示。

图8 MMC子模块输出电压波形

图9 MMC结构交流接口线电压波形
由图8可知,MMC结构的每个子模块的输出电压波形是一个脉宽正弦变化的两电平脉冲,正是多个这样的脉冲叠加起来组成了电平数较大的阶梯正弦波输出信号。由图9可知,在实验平台每个桥臂子模块数N=2的情况下,线电压电平数为9。推而广之,随着桥臂子模块数N的逐渐递增,MMC交流接口处电压波形将越来越逼近正弦波。
4 结束语
本文在分析MMC系统的结构特点基础上,提出了一种以双核MCU+FPGA体系为主控制器、以CPLD为从控制器的两级控制架构,并就涉及到的关键软硬件技术进行了阐释分析。在实验室搭建的样机平台上,对两级控制系统进行了实际测试,结果证明了文中相关分析和设计的正确性和合理性。
[1] 王思蕴. 模块化多电平变流器控制方法的研究[D].浙江:浙江大学,2013.
[2] 屠卿瑞,徐政,郑翔,等. 模块化多电平换流器型直流输电内部环流机理分析[J]. 高电压技术,2010,36(2):547-552.
[3] 唐庚,徐政,刘昇. 改进式模块化多电平换流器快速仿真方法[J]. 电力系统自动化,2014,38(24):56-61,85.
[4] 杨晓峰,郑琼林. 基于MMC环流模型的通用环流抑制策略[J]. 中国电机工程学报,2012,49(18):59-65,178.
[5] QINGRUI TU, ZHENG XU, LIE XU. Reduced switching-frequency modulation and circulating current suppression for modular multilevel converters[J].Power Delivery IEEE Transactions on , 2011,26(3):2009-2017.
[6] 石紫月. 模块组合多电平变换器(MMC)的均压策略研究[D].北京:北京交通大学,2014.
[7] 王晓鹏,杨晓峰,范文宝,等. 模块组合多电平变换器的脉冲调制方案对比[J]. 电工技术学报,2011,26(5):28-33.
[8] 仉雪娜,赵成勇,庞辉,等. 基于MMC的多端直流输电系统直流侧故障控制保护策略[J]. 电力系统自动化,2013,37(15):140-145.
[9] 李要乾. 模块组合多电平变换器(MMC)的调制策略研究[D].北京:北京交通大学,2015.
[10] 姜旭,肖湘宁,尹忠东,等. 基于载波移相SPWM级联式变换器输出谐波分析[J]. 电力电子技术,2005,39(5):60-62.
Software & Hardware Design for Control Systems with MMC Structure
Ma Qindong1, Li Chunlai2, Zhang Minji3, Ling Zhibin1
(1. Dept. of Electrical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China;2. Academy of Science, State Grid Qinghai Electric Power Corporation, Xi’ning Qinghai 810000, China;3. China National Offshore Oil Corporation Research Institute, Beijing 100028, China)
Modular Multilevel Conversion (MMC) with its good scalability, modularization and voltage output characteristics is now gradually popularized in its application to the field of medium and high-voltage & high-capacity power conversion. First, this paper presents its main topological structure and technical features. Then, with respect to its structural characteristics, this paper proposes a two-level control system architecture using dual-core microprocessor + FPGA as master controller and CPLD as slave controller. Their software and hardware designs are explained. The laboratory prototype verifies the reasonability of this control system.
MMC; control system; master-slave hierarchy; cascade expansion; high-speed communication; software and hardware design
青海省光伏发电并网技术重点实验室开放项目(2014-Z-Y34A)
10.3969/j.issn.1000-3886.2016.04.002
TM46
A
1000-3886(2016)04-0005-03
马勤冬(1990-),男,重庆人,硕士生,从事电池储能技术研究。
定稿日期: 2015-12-27
