多伯努利滤波的快速红外弱小目标检测与跟踪
2016-12-06李翠芸姬红兵
李翠芸,李 宁,姬红兵
(西安电子科技大学电子工程学院,陕西西安 710071)
多伯努利滤波的快速红外弱小目标检测与跟踪
李翠芸,李 宁,姬红兵
(西安电子科技大学电子工程学院,陕西西安 710071)
针对复杂背景下多个弱目标检测与跟踪中存在的跟踪不稳定、非实时及量测模型高度非线性问题,提出一种基于多伯努利滤波的快速检测与跟踪算法.首先,采用改进的Robinson Guard算法抑制背景杂波,避免强起伏背景图像中目标被抑制的问题;其次,采用平方根容积卡尔曼滤波实现多伯努利检测前跟踪,在保证实时跟踪的同时,解决了滤波的高度非线性,避免了协方差矩阵负定造成的数值不稳定.实测红外背景图像实验表明,改进的Robinson Guard算法能够有效抑制背景杂波、保留弱目标信息,平方根容积卡尔曼多伯努利检测前跟踪能更准、更稳定地估计目标数目和状态,实现目标的实时检测与跟踪.
红外图像序列;背景杂波抑制;Robinson Guard滤波;平方根容积卡尔曼;多伯努利滤波;检测前跟踪
红外图像中多个弱小目标的搜索与跟踪一直是目标跟踪领域的研究热点与难点[1-2].红外成像系统中,目标面积小,距离远且受大气影响,信号能量经过长时间衰减,再加上图像中背景杂波的干扰,导致图像信噪比很低,单帧图像探测目标的传统方法已不再适用,而通过累积目标轨迹能量的检测前跟踪(Track-Before-Detect,TBD)算法成为新的研究方向.传统TBD的实现方法很多,基于粒子实现的TBD由于采用数值计算方法,不需要量化目标状态空间,并能有效解决量测非线性问题而成为研究的重点[3-4].
实测的红外图像不仅包含待检测的小目标,还包含大量的背景杂波,因此,检测前必须先进行背景杂波抑制,来提高目标的检测概率.现有杂波抑制方法中的空域滤波由于利用目标亮度高于其邻域背景,且与背景不相关的特性,直接在空间域处理图像而受到广泛应用[5-6].然而对于强起伏背景杂波图像,目标背景变化频率高,常用的空域滤波算法抑制效果并不理想,抑制不彻底会出现虚警现象,而抑制过度会丢失目标信息,出现目标漏检问题.可见,现有方法对低信噪比图像的杂波抑制性能是有限的.
对于多个弱小目标的检测跟踪,每一时刻的目标数目和目标状态都可能发生变化,不仅需要解决单目标TBD的高度非线性问题,还要解决多目标的数据关联问题.20世纪末,美国学者Mahler将随机集理论(Random Finite Set,RFS)引入多目标跟踪领域,后来又相继提出基于RFS的多目标滤波方法,如概率假设密度(Probability Hypothesis Density,PHD)滤波[7]、势概率假设密度(Cardinality Probability Hypothesis Density,CPHD)滤波[8]和多伯努利(Multi-target Multi-Bernoulli,Me MBer)滤波[9],有效解决了多目标跟踪中数据关联问题.基于上述算法又出现了各种改进的跟踪算法[10],文献[11]将RFS理论引入多弱目标跟踪领域,提出基于PHD-TBD的弱目标检测跟踪方法,并通过序贯蒙特卡洛(Sequential Monte Carlo,SMC)方法实现,取得了很好的效果.文献[12]将MeMBer滤波与TBD相结合,提出多伯努利检测前跟踪(Multi-Bernoulli Track-Before-Detect,MB-TBD)算法,并给出了SMC实现方法.文献[13]提出基于CPHD-TBD的弱目标跟踪方法,提高了弱目标的跟踪性能.为有效解决量测模型高度非线性问题,文献[14-15]分别给出了用高斯粒子滤波(Gaussian Particle Filter,GPF)实现的PHD-TBD、MB-TBD算法,跟踪效果明显优于SMC实现结果.但随着信噪比的降低和滤波维度的升高,上述非线性滤波方法的稳定性和精度均受到挑战,而且现有弱目标跟踪方法的验证大多是在理论仿真环境下,并没有与实测背景图像相结合.
针对以上问题,笔者提出一种改进的Robinson Guard滤波方法,可有效抑制强起伏背景杂波,保留目标的内部信息;其次,采用平方根容积卡尔曼实现MB-TBD,通过在滤波过程中直接传递协方差矩阵的平方根形式,保证协方差矩阵的正定性来增强算法鲁棒性和数值稳定性,在一定程度上提高了滤波性能;最后,结合实际红外背景图像序列,验证所提算法的有效性.
1 实测红外弱目标检测跟踪算法
1.1改进的Robinson Guard空间滤波器
红外图像预处理的目的是抑制图像背景、去除噪声和保留目标信息.传统的Robinson Guard滤波由于其基于模板操作,在待检测像素周围设置保护带,可有效保留小尺寸目标内部信息,在工程上应用较为广泛[5].当图像背景起伏较小、目标处于大面积缓慢变化的低频部分时,该滤波器的背景抑制效果很好.但是当目标位于强背景(如云层等)边缘时,窗口模板内保护带的灰度起伏非常大,目标灰度有可能始终处于保护带的最大值和最小值之间,这样目标极易被当作背景抑制掉,出现目标漏检问题.
针对上述问题,提出如下改进的Robinson Guard空间滤波器.
以尺寸为7×7的滤波器模板为例,改进Robinson Guard空间滤波器的结构如图1所示.
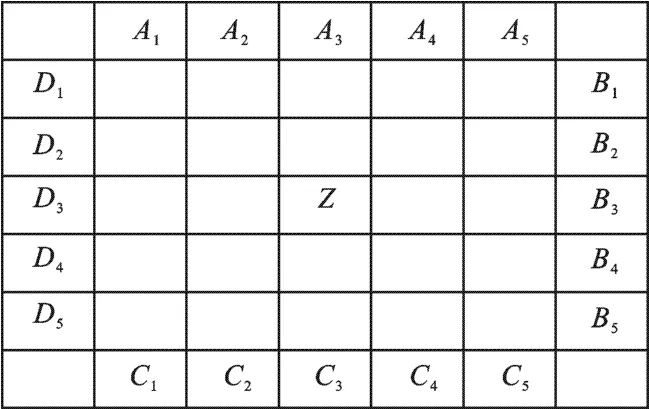
图1 改进的Robinson Guard滤波器结构图
其滤波器算法的步骤如下:
步骤1 求均值,其表达式可表示为

其中,M表示求均值操作,mB、mC和mD方法如同mA方法.
步骤2 判断灰度起伏,可表示为

步骤3 输出待检测像素,可表示为

1.2基于平方根容积卡尔曼的MB-TBD算法
Me MBer滤波是Mahler继PHD和CPHD滤波后,提出的又一种基于RFS的多目标跟踪方法,对于多目标非线性滤波,文献[16]给出了Me MBer较另外两种算法在滤波精度和计算复杂度方面的优势.平方根容积卡尔曼[17]是一种借鉴平方根滤波思想,直接递推更新协方差矩阵的平方根形式,采用求容积规则原理解决“非线性函数×高斯密度”形式求积分问题的非常有效的非线性滤波方法.文中采用平方根容积卡尔曼(Square-root Cubature Kalman,SCK)来实现MB-TBD算法.
基于高斯假设,滤波过程中每个伯努利项的概率分布用高斯项近似,其中每个高斯项的均值和协方差通过SCK滤波计算得出,推导得出SCK-MB-TBD算法的具体实现步骤如下:

式(10)中,Tria代表一种三角分解.例如,S=Tria(A),则S=T,且S是一下三角矩阵,其中是对矩阵AT进行QR分解得来的上三角矩阵R的上三角部分.
伯努利项的存在概率可表示为




(3)修剪合并伯努利项.剔除存在概率小于修剪门限的伯努利项;合并距离小于合并门限的两个伯努利项;合并方法与合并高斯项相同,将伯努利项的存在概率看作高斯项的权值,并保证合并后的存在概率在0到1之间.
(4)状态提取.将存在概率大于0.5的伯努利项数目作为目标数,相应伯努利项的均值取为目标状态.
2 仿真实验结果及分析
2.1仿真条件说明
采用一组80帧244×320的实测红外背景图像序列,并在其中加入4个大小为3×3相继出现和消失的目标,目标以每帧1个像素的速度进行直线运动穿过云层.采用最优子模型分配距离(Optimal SubPattern Assignment,OSPA)[18],并依据对多个弱小目标的目标数目和目标状态的估计来评判跟踪算法的性能.
仿真场景设置:目标状态方程如式(1);目标观测方程如式(2);4个目标的初始位置依次为[143,-1, 150,1,I]T,[150,-1,210,-1,I]T,[40,1,40,1,I]T,[90,-1,30,1,I]T,对应的存在时间依次是(1 s~70 s),(20 s~76 s),(10 s~80 s),(30 s~70 s).多伯努利滤波器初始化时给定第1个目标的准确位置,新生目标的位置给定准确值.
仿真参数设置:分辨单元Δx=Δy=1,采样周期T=1,运动噪声功率谱密度q1=0.001,强度噪声功率谱密度q2=0.01,目标状态强度I=100,伯努利修剪门限Tprun=0.001,伯努利合并门限Umerg=4,最大伯努利项数目Tmax=20,目标影响邻域参数p=1,传感器模糊系数Σ=1,目标存活概率ps=0.99,脱靶距离OSPA参数c=10,p=2.
2.2仿真实验1
基于2.1节设置的仿真场景和仿真参数,采用传统Robinson Guard算法与文中提出的改进Robinson Guard算法进行仿真实验对比.先分别采用7×7的模板对红外图像序列进行杂波抑制,两种算法的单帧抑制效果如图2所示.再用SCK-MB-TBD算法对目标进行检测跟踪.设置仿真实验信噪比为10 d B,多弱目标检测跟踪结果如图3和图4所示.

图2 两种算法背景抑制效果图
综合图3和图4可以看出,在前21帧,没有目标穿越云层,目标航行背景强度起伏小,两种算法都能很好地抑制背景,实现对所有出现目标的准确检测和跟踪.在第22帧,目标1即将进入云层,临近云层边缘,此时目标所处区域背景强度起伏大,导致传统Robinson Guard算法把目标当作背景抑制掉,如图3(a)所示,出现目标失跟.同样在第46帧,目标3进入云层时也被抑制掉,如图3(b)所示,出现目标失跟.而在目标穿越云层后,传统算法并没有重新检测到失跟目标,致使目标出现永久失跟,图4(a)的目标跟踪轨迹出现永久中断.而改进Robinson Guard算法无论目标是否穿越云层都很好地完成了目标的准确检测与跟踪,如图4(b)所示.

图3 实测红外背景图像跟踪结果图(○表示传统算法,□表示改进算法)

图4 笛卡尔系目标跟踪轨迹
由仿真实验1结果及分析可见,改进的Robinson Guard背景抑制算法较传统的背景抑制算法能更好地抑制强起伏背景杂波,能更加有效地保留弱小目标信息.
2.3仿真实验2
文献[15]提出了高斯粒子多伯努利滤波检测前跟踪算法,其仿真实验已表明,在低信噪比下,GPF-MBTBD算法有非常好的多弱小目标检测跟踪性能.
基于2.1节设置的仿真场景和仿真参数,可用GPF-MB-TBD算法与文中提出的SCK-MB-TBD算法进行仿真对比.先用新提出的改进Robinson Guard算法采用7×7的模板对红外图像序列进行背景杂波抑制,再分别用GPF-MB-TBD算法和SCK-MB-TBD算法对目标进行检测跟踪.在算法实现过程中,信噪比直接决定目标的检测与跟踪性能.为验证文中提出算法的跟踪效果,分别在信噪比为10 dB和6 dB条件下进行实验,设置GPF-MB-TBD算法中每个伯努利分量的采样粒子数为100.仿真实验结果如图5所示.

图5 两种算法跟踪性能比较
综合图5可以看出,两种算法均可实现红外背景下多个弱小目标的实时检测与跟踪,而且检测与跟踪的性能随信噪比的下降而降低.当信噪比为10 dB时,SCK-MB-TBD算法与GPF-MB-TBD算法的OSPA势误差没有明显的差距,都接近于零,说明两种算法都能实时发现目标并准确地估计目标数目.在跟踪精度方面,两种算法的OSPA距离误差没有明显差距,而且误差的整体波动非常小.OSPA总体误差主要受OSPA距离误差的影响,整体波动也比较小,说明两种算法能够精确地检测并跟踪到所有目标.当信噪比为6 d B时,算法的稳定性明显下降.两种算法的OSPA势误差出现局部波动,出现虚警或漏检现象,但整体上目标数估计还是准确的,不会出现严重的估计偏差.在跟踪精度方面,两种算法OSPA距离误差的整体波动依然非常小,说明两种算法对目标位置都能进行精确估计.OSPA总体误差受OSPA势误差的影响随着目标数估计偏差出现较大波动,但两种算法仍能检测并跟踪到所有目标.
由仿真实验2结果及分析可见,文中所提算法的红外多弱小目标检测跟踪性能与GPF-MB-TBD算法相比没有明显差别.但SCK-MB-TBD算法基于平方根容积卡尔曼滤波,在滤波过程中直接传递协方差矩阵的平方根形式.文献[17]提出,SCK能够保证协方差矩阵的非负定性,提高数值稳定性,而且其更适合维数较高的非线性滤波.所以,SCK-MB-TBD算法较GPF-MB-TBD算法更适合高滤波维度的红外弱目标检测与跟踪.
最后,在信噪比为10 dB条件下进行100次实验,统计平均SCK-MB-TBD算法实现1次完整跟踪的时间为0.132 3 s,平均每帧图像跟踪耗时为0.001 7 s.
3 结束语
笔者提出一种改进的Robinson Guard背景抑制算法和基于SCK-MB-TBD算法的目标跟踪算法,能够对红外图像序列中的多个弱小目标实现实时检测并精确跟踪.理论推导及实测红外背景图像实验表明:改进Robinson Guard的强起伏背景抑制效果更好,保留弱小目标信息的能力更强.SCK-MB-TBD算法可保证跟踪实时性和数值稳定性,而且算法的容积点个数与滤波维数相关,更适合维数较高的红外弱目标滤波,在一定程度上提高了滤波性能.
[1]LIU L,HUANG Z J.Infrared Dim Target Detection Technology Based on Background Estimate[J].Infrared Physics& Technology,2014,62:59-64.
[2]林涛,韩平丽,刘飞.利用窄波段像素色比的红外弱小目标检测方法[J].西安电子科技大学学报,2014,41(4):58-63,157. LIN Tao,HAN Pingli,LIU Fei.Small Target Detection Utilizing the Narrow Wavebands[J].Journal of Xidian University,2014,41(4):58-63,157.
[3]武斌,李鹏.一种新的红外弱小目标检测前跟踪算法[J].西安电子科技大学学报,2011,38(3):107-113. WU Bin,LI Peng.Novel Track-before-detect Algorithm for Small Infrared Target[J].Journal of Xidian University, 2011,38(3):107-113.
[4]CAI F,FAN HQ,FU Q.Track-before-detect Filter for Sensors with Point Spread Function Using Thresholded Measurements[C]//Proceedings of 17th International Conference on Information Fusion.Piscataway:IEEE,2014:1-6.
[5]罗军辉,姬红兵,刘靳.一种基于空间滤波的红外小目标检测算法及其应用[J].红外与毫米波学报,2007,26(3): 209-212. LUO Junhui,JI Hongbing,LIU Jin.Algorithm of IR Small Targets Detection Based on Spatial Filter and Its Application [J].Journal of Infrared and Millimeter Waves,2007,26(3):209-212.
[6]FARAJZADEH M,MAHMOODI A,ARVAN M R,et al.Detection of Small Target Based on Morphological Filters [C]//Proceedings of 20th Iranian Conference on Electrical Engineering.Washington:IEEE,2012:1097-1101.
[7]MAHLER R.Multitarget Bayes Filtering via First-order Multitarget Moments[J].IEEE Transactions on Aerospace and Electronic Systems,2003,39(4):1152-1178.
[8]MAHLER R.PHD Filters of Higher Order in Target Number[J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(4):1523-1543.
[9]MAHLER R.Statistical Multisource-multitarget Information Fusion.Boston[M].London:Artech House Publishers,2007.
[10]李翠芸,江舟,姬红兵.一种新的未知杂波环境下的PHD滤波器[J].西安电子科技大学学报,2014,41(5):18-23. LI Cuiyun,JIANG Zhou,JI Hongbing.Novel PHD Filter in Unknown Clutter Environment[J].Journal of Xidian University,2014,41(5):18-23.
[11]PUNITHAKUMAR K,KIRUBARAJAN T,SINHA A.A Sequential Monte Carlo Probability Hypothesis Density Algorithm for Multitarget Track-before-detect[C]//Proceedings of the SPIE:5913.Bellingham:SPIE,2005:1-8.
[12]VO B N,VO B T,PHAM N T,et al.Joint Detection and Estimation of Multiple Objects from Image Observation[J]. IEEE Transactions on Signal Processing,2010,58(10):5129-5140.
[13]林再平,周一宇,安玮.基于势概率假设密度滤波的检测前跟踪算法[J].红外与毫米波学报,2013,32(5):437-443. LIN Zaiping,ZHOU Yiyu,AN Wei.Track-before-detect Algorithm Based on Cardinalized Probability Hypothesis Density Filter[J].Journal of Infrared and Millimeter Waves,2013,32(5):437-443.
[14]李翠芸,曹潇男,廖良雄.高斯粒子PHD滤波的多个弱小目标TBD算法[J].系统工程与电子技术,2015,37(4): 740-745. LI Cuiyun,CAO Xiaonan,LIAO Liangxiong.Track before Detect Using Gaussian Particle Probability Hypothesis Density[J].Systems Engineering and Electronics,2015,37(4):740-745.
[15]LI C Y,JI H B,ZOU Q B,et al.A Novel Multi-Bernoulli Filter for Joint Target Detection and Tracking[C]// Proceedings of 2013 IET International Conference on Information and Communications Technologies.Stevenage:IET, 2013:176-180.
[16]VO B T,VO B N,CANTONI A.The Cardinality Balanced Multitarget Multi-Bernoulli Filter and Its Implementations [J].IEEE Transactions on Signal Processing,2009,57(2):409-423.
[17]郝燕玲,杨峻巍,陈亮,等.平方根容积卡尔曼滤波器[J].弹箭与制导学报,2012,32(2):169-172. HAO Yanling,YANG Junwei,CHEN Liang,et al.Square Root Cubature Kalman Filter[J].Journal of Projectiles, Rockets,Missiles and Guidance,2012,32(2):169-172.
[18]SCHUH MACHER D,VO B T,VO B N.A Consistent Metric for Performance Evaluation of Multi-object Filters[J]. IEEE Transactions on Signal Processing,2008,56(8):3447-3457.
(编辑:齐淑娟)
Fast IR dim small targets detection and tracking based on the multi-Bernoulli filter
LI Cuiyun,LI Ning,JI Hongbing
(School of Electronic Engineering,Xidian Univ.,Xi’an 710071,China)
In view of the problems of tracking instability and non real-time and highly nonlinear measurement model for the detection and tracking of multiple Infrared(IR)dim targets under the complicated background,a fast detection and tracking algorithm based on multi-Bernoulli filter is presented. Firstly,the improved Robinson Guard filter suppresses the background clutter in order to avoid the suppression of the target in the strong background image.Then,the square-root cubature Kalman filter (SCK)performs the multi-Bernoulli track-before-detect(MB-TBD).It can perform real-time tracking in the highly nonlinear model.The numerical instability caused by a negative definite covariance matrix is avoided.The experiments with some real IR background images show that the improved Robinson Guard algorithm can suppress the background clutter effectively and preserve the dim target information.It is also shown that SCK-MB-TBD can estimate the number and states of targets accurately and stably so as to complete target detection and tracking.
IR image sequence;background clutter suppression;Robinson guard filter;square-root cubature Kalman(SCK);multi-Bernoulli filter(MB);track-before-detect(TBD)
TN953
A
1001-2400(2016)04-0069-06
10.3969/j.issn.1001-2400.2016.04.013
2015-06-05 网络出版时间:2015-10-21
国家自然科学基金资助项目(61372003);国家自然科学基金青年基金资助项目(61301289)
李翠芸(1976-),女,副教授,博士,E-mail:cyli@xidian.edu.cn.
网络出版地址:http://www.cnki.net/kcms/detail/61.1076.TN.20151021.1046.026.html
