多旋翼无人机直流电机驱动系统优化*
2016-12-01裴信彪徐东甫续志军
何 帅,裴信彪,宫 勋,徐东甫,白 越,续志军
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 10039)
多旋翼无人机直流电机驱动系统优化*
何帅1,2,裴信彪1,2,宫勋1,徐东甫1,2,白越1,续志军1
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 10039)
为了提高电机驱动系统可靠性,采用三相全控电桥H_PWM_ON_L_ON控制方式来驱动电机转动,通过反电势过零点检测方式分析三相反电动势端电压与中性点的关系,采用功率MOSFET作为开关器件,采用三个IR2101芯片驱动六个复合功率管实现精准换相。采用该驱动系统的无人机空载续航时间与采用常规H桥驱动系统相比提高了20%,该驱动系统可在-25℃的条件下依然稳定运行,响应速率提高10%。
无位置传感器无刷直流电机;三相全控电桥;复合功率管;IR2101
导读:无人机系统技术一直在军事、国防等领域拥有重要地位。近年来,随着商用无人机的蓬勃发展,无人机在民用领域的应用前景日趋广阔。作为现代飞行控制、信息传输等技术的基础,电子技术在无人机的发展中具有举足轻重的意义。为了促进无人机系统技术领域的技术交流,推动我国无人机系统技术领域电子技术的发展,本刊开展了“无人机系统电子技术”主题专栏征文活动。特聘请北京航空航天大学向锦武教授为专栏特约主编。从收到的近百篇稿件中遴选出优秀稿件10余篇,于第9期及第10期刊出。论文内容涵盖了无人机领域相关的多方面内容,包括无人机控制与驱动、无人机通信、目标识别与跟踪、无人机仿真平台设计与实现、导航与定位等。期望对从事无人机系统技术领域研究的读者有所帮助。

特约主编:向锦武,飞行器设计专家。现任北京航空航天大学教授、博士生导师、教育部长江学者特聘教授、校学术委员会副主任、无人机设计研究所所长兼总设计师、“航空科学与技术”国家实验室(筹)首席科学家。同时兼任中国航空学会无人机及微型飞行器分会副主任、中国宇航学会无人飞行器分会常务理事、《无人机》编委会委员、《电子技术应用》编委会委员。
0 引言
近年来,多旋翼无人机的研究和应用范围逐步扩大,大部分无人机均采用无位置传感器无刷直流电机作为其动力基础。无感无刷直流电机为外转子结构,通过驱动系统使螺旋桨高速旋转。无刷直流电机主要分为两种,一种是有霍尔位置传感器控制,一种是无霍尔位置传感器控制。有霍尔传感器控制的无刷直流电机结构相对复杂,可靠性差。无位置传感器控制的直流电机适用场合广,可靠性高,相对于有霍尔传感器控制有较大优势。因此,现在多采用无位置传感器控制。
无刷直流电动机的无位置传感器控制中,没有传感器直接检测出转子位置,但在电动机正常运转过程中,仍然需要转子位置信号来控制电动机换相。因此,如何获得精准的转子位置信号并控制电机换相,成为无位置传感器无刷直流电机控制的关键。当前转子获取方法主要有反电动势三次谐波积分检测法、磁链估计法、续流二极管检测法、扩展卡尔曼滤波法、反电动势过零检测方法等。若使用DSP作为直流电机的主控芯片[1-2],因为DSP具有强大的运算处理能力,所以电机可以快速并精准的启动与控制,但其成本较高,电路结构也相对复杂,并且低速位置存在检测误差。
本文提出了一种以反电势过零检测原理为基础,采用三向六臂全控电桥驱动电路,并采用复合型功率器件代替普通的MOSFET,控制模块选取可靠性高、集成度高、控制功能强、低电压低功耗的单片机 C8051F500来实现,因此外围电路结构简单,响应速度快,可靠性高。并采取软硬件结合启动与PWM速度控制方式,实现电机的启动与稳定运行[3-4],大大提高多旋翼无人机无刷直流电机的调速与控制功能。
1 反电势过零检测
无位置传感器无刷直流电机反电势过零检测法的基本原理为:电机定子绕组采用星形接法连接,检测电枢绕组产生的梯形反电动势波。本系统采用三相电桥两两导通的控制方式,H_PWM_ON_L_ON(上桥臂的MOSFET进行PWM调制,下桥臂的MOSFET恒通)调制方式,每相绕组正反向分别导通120°电角度,即每一瞬间有两个功率管导通,每个60°电角度换相一次,然后通过检测未导通相的反电动势过零点,获取转子位置[5]。永磁无刷直流电机三相绕组等效电路如图1所示。

图1 三相绕组等效电路
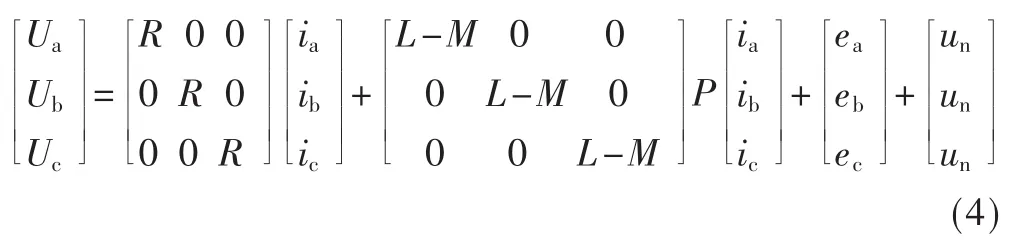
U为相电压,R为相电阻,i为相电流,L为定子绕组自感,M为定子绕组互感,e为相电势,un为定子绕组中性点对地电压,P为微分算子。则三相绕组的平衡表达式为:

假定三相定子绕组完全对称,故有:

两边同时乘以L,可以得到:

将式(2)代入式(3)可得:
由上式可得出:

对于星形接法的三相直流无刷直流电机在两相通电模式条件下,满足式(2),并且在反电动势波形过零附近,导通两相反电动势绝对值大小相等符号相反。所以上三式相加可得:

两相通电模式下,若 A相悬空,则 A相绕组中 ia=0,可由式(5)求出:


式(6)和式(7)消去中性点电压得到 A相反电动势与各项端电压的关系:因此,当悬空相绕组端端电压与中性点电压进行比较进而获取转子绕组反电势过零时刻。
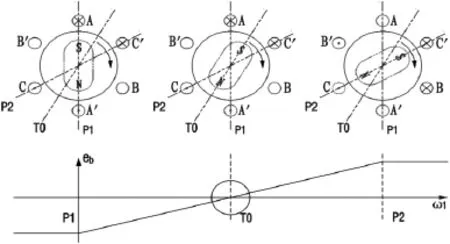
图2 转子与反电势关系
取电动机正常工作状态,增加转子位置在T0时刻的状态,并细化转子位置的变化过程,得到如图2所示的转子位置与反向电动势的相互关系。
在P1时刻,电流从A相绕组流入,C相绕组流出,此时线圈AA′受到一个逆时针方向的电磁力,同时转子受到顺时针方向的作用力。在同一时刻,CC′也会作用于转子,使其受到顺时针方向的作用力,并且由于B相绕组切割磁力线,产生负的反向电动势。当转子顺时针转过30°电角度后在T0时刻,B相绕组运动方向与磁力线平行,反向电动势为零,产生过零信号。当转子继续转过30°电角度后到达P2时刻便是换相时刻,控制电流由从B相绕组流入,C相绕组流出,如此循环往复。但是由于三相全桥的噪声过大导致换相时电动机绕组有续流过程,这将导致杂散噪声干扰电路的换相信号,干扰换相的准确性[6-7]。所以为了优化换向系统我们采用延时换相,即延时避开绕组电感续流过程再检测过零点。
为了优化驱动系统,采用三相电桥取代原有的H桥,然后构建升力测试实验平台,实验平台的输出通过TDS2014C示波器实时显示,可测得相同占空比下通过H桥和三相电桥驱动的旋翼产生的升力,实验结果如图3(a)和3(b)所示。
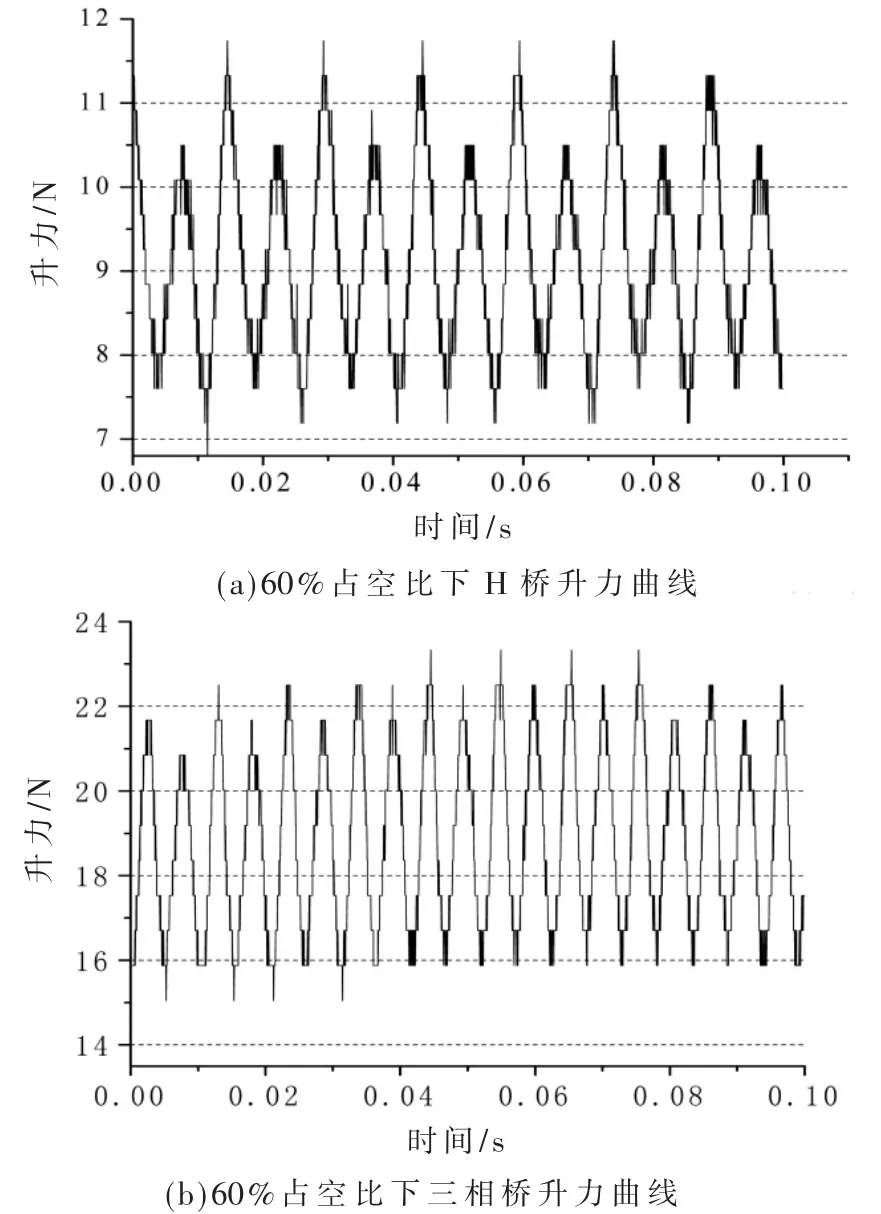
图3 旋翼升力曲线
从图3(a)和 3(b)可看出,相同占空比下采用三相电桥驱动的电机产生的升力是H桥升力的近两倍。
2 直流电机总体结构
如图4所示,无位置传感器无刷电机可以分为4个模块:直流电源模块高效率DC-DC,控制模块C8051F500单片机,驱动模块 IR2101驱动阵列,反电势检测模块。电源模块充分考虑电池瞬间高压、瞬间浪涌电流的情况,在保证耐压值高、过电流强的前提下用DC-DC代替LDO电源。控制模块选取可靠性高、集成度高、控制功能强、低电压低功耗的 MCU,搭建通信迅速准确、控制实时无误的控制器。采用三组全控电桥驱动方式,能够高速地驱动电机换向运行。
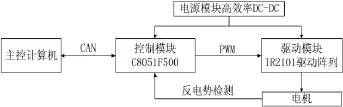
图4 直流电机总体结构
3 硬件系统优化
3.1端电压检测电路优化
端电压检测电路如图5所示。作为整个硬件设计的核心,端电压检测电路将检测到的三路反电势延迟信号的过零点信号直接传输到MCU中,待转子转过30°电角度后MCU通过I/O口发出相应的控制字改变PWM信号的值,从而改变直流电机中的功率MOSFET管的两两导通顺序,进而控制直流电机的转速与方向,使电机稳定运行并快速响应。
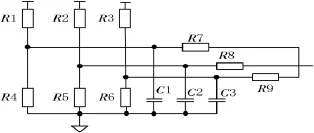
图5 端电压检测电路
3.2电源模块优化
本系统采用的主控是C8051F500单片机,它的工作电压为3.3 V。驱动模块采用的是 TI公司的IR2101,它的工作电压是12 V。并且提供的电源电压为24 V。为了向整个驱动系统提供一个混合电压系统。我们采用TI公司的MAX16910CASA芯片作为核心,设计出高效率降压DC-DC电源模块代替原有的的低电压差线性稳压器(LDO)电源模块分别给单片机与IR2101使电源模块得到优化从而为整个系统提供更稳定,更可靠的电源。其典型电路如图6所示。
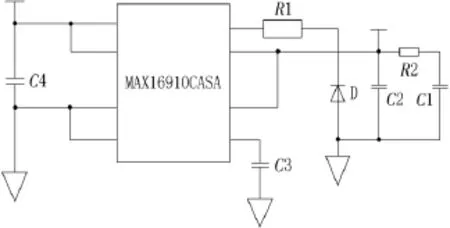
图6 IR2101驱动电路
3.3驱动模块IR2101阵列优化
为了保证三相全桥的效率,全部采用N通道MOSFET三相全控桥阵列。单片机直接输出的PWM控制信号不足以驱动功率管的通断。要在MCU控制信号与功率电路之间加上驱动电路。本系统用三个IR2101替代原有的单个 IR2136已达到优化驱动模块的目的,采用三个 IR2101后电路更简单,简化了逻辑电路对功率器件的要求,可靠性明显提高。
3.4功率管优化
本系统之前采用的是三个P型MOSFET与三个N型MOSFET结合使用作为三相电桥的开关器件,但由于P型 MOSFET的阻抗较大,响应速率相对较慢,故为了优化开关器件本系统采用6个PSMN5R5功率MOSFET管作为开关器件。通过对比实验,可以明显看出采用全N型MOSFET的响应速率明显快于原有的3个N型与三个P型结合的电桥。驱动系统实物图如图7所示。
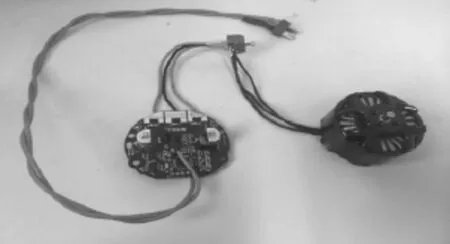
图7 驱动系统实物图
4 实验结果及分析
实验平台:350 W 无刷无位置传感器直流电机,1 GHz、5 GSA/s TDS2014C示波器,DFY仪表电源箱,电机驱动系统模块,实体飞行器。
将原有驱动系统与优化后驱动系统分别安装到飞行器的两个臂上,进行转速测量与响应速率测量。通过DSP主控同时对优化前后的驱动系统输入相同PWM信号,通过旋翼转速变换的快慢可以测出响应速率的相应情况。
图8为旋翼转速对比实验结果,X轴是时间,Y轴是转速,蓝色曲线是原有驱动系统旋翼转速随时间变化而变化的曲线;绿色曲线则是优化后系统旋翼转速随时间变化曲线。从图中数据可看出优化后系统响应速率提高了10%,旋翼转速提高了10%。
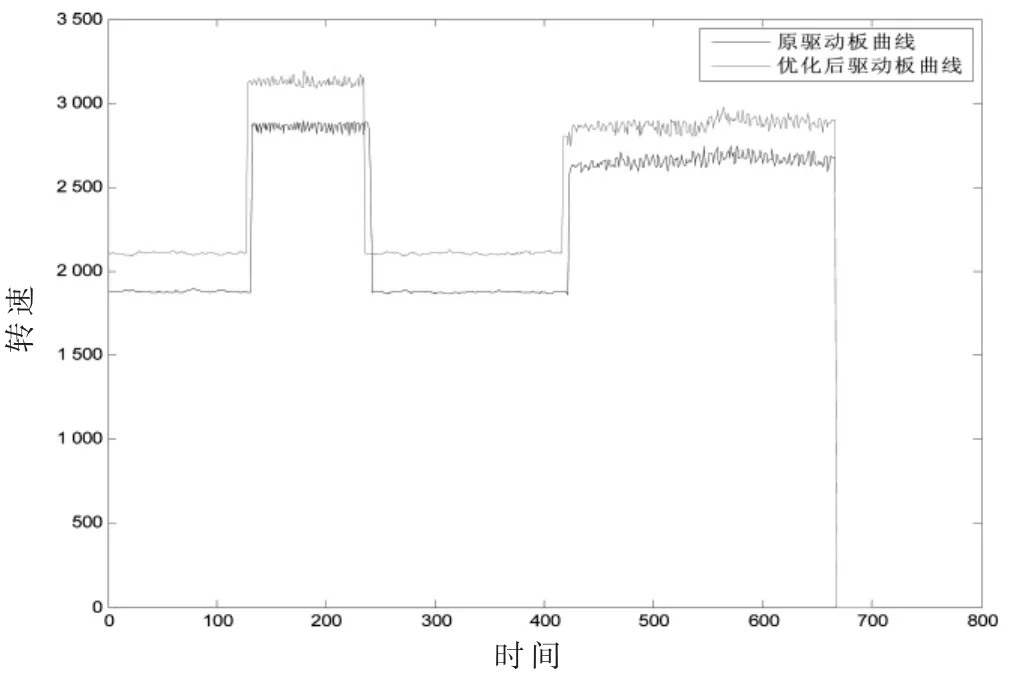
图8 旋翼转速对比
图9为给定转速为 2 000 r/min时电机带载的反向电动势波形图,可以看出反向电动势过零点附近有很好的单调性,持续时间长,可以很好地避免误过零现象。
图9 实测反向电动势波形
直流电机正常运行时,实测直流电机A相端电压的波形如图10所示。从图10(a)中可看出,从0.46 ms~2.64 ms期间三相全控电桥总价换相六次,为一个完整的电周期。在0.47 ms~0.83 ms为电周期的第一扇区,下桥臂B相恒通,上桥臂C相PWM调制。端电压不仅时刻与调制信号保持同步,而且六个扇区的时间间隔在每一个电周期都是均匀的。结合图10(b)与图10(c)表明驱动电路板占空比与电周期成反比与转速成正比,同时每个电周期内六个扇区的时间间隔均匀,端电压输出波形受控于全控电桥电路的调制信号。通过实际装机证实本文所研究驱动板可以驱动无刷无感直流电机正常运行,并且为无人机的飞行提供足够动力。
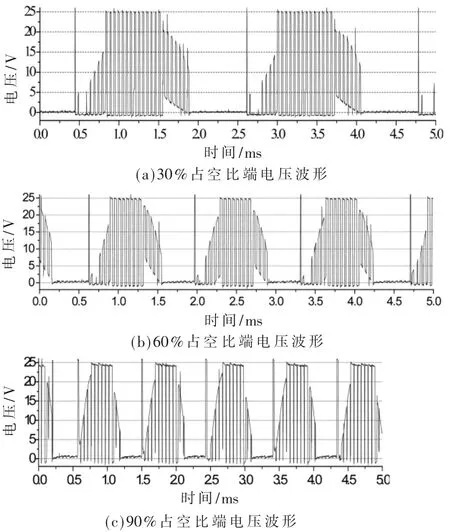
图10 电动机A相端电压
5 结论
经过理论分析与实验验证,以六个N型MOSFET功率管为核心,基于三相全控电桥PWM控制的驱动电路,直流电机的响应速率提高了10%,提高了换相的准确性,旋翼升力提高了50%,使电机的效率达到预期水平。驱动系统整体可靠性明显提高,能够更好的满足多旋翼无人机的实际应用要求。
[1]冬雷.DSP原理及电机控制系统应用[M].北京:北京航空航天大学出版社,2007.
[2]王宏伟,梁晖无位置传感器无刷直流电机的DSP控制技术[J].电力电子技术,2005,39(6):102-104.
[3]许大中,贺益康.电机控制(2版)[M].杭州:浙江大学出版社,2002.
[4]宋海龙,杨明,范宇,等.无刷直流电动机的无位置传感器控制[J].电机与控制学报,2002,6(3):208-212.
[5]程时兵,张爱军.IR2110在无刷直流电机驱动电路中的应用[M].机电元件,2010,12,30.
[6]夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009.
[7]庄乾成,杜豫平.无位置传感器直流无刷电机控制的研究[J].制造业自动化,2011,33(8):98-101.
[8]李利平,益斌,徐卫忠.无刷直流电机的控制研究[J].电气动化,2012,34(3):15-17.
[9]孟磊,蒋宏,罗俊,等.四旋翼飞行器无刷直流电机调速系统的设计[J].电子设计工程,2011(12):140-142.
[10]乔维维.四旋翼飞行器飞行控制系统研究与仿真[D].太原:中北大学,2012.
Optimize driving system of direct current motor for multiple rotor unmanned aerial vehicle
He Shuai1,2,Pei Xinbiao1,2,Gong Xun1,Xu Dongfu1,2,Bai Yue1,Xu Zhijun1
(1.Changchun institute of optics,Fine mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China;2.University of Chinese Academy of Sciences,Beijing 100039,China)
To enhance the driving system reliable.Thisarticle controlthe motorby three-phase fully-controlled bridge H_PWM_ON_L_ON.Use the principle of back electromotive force zero-crossing testing,the relationship between the floating phase terminal end voltage and midpoint voltage in DC link of three phases’back electromotive force was analyzed.Choice power MOSFET to be the switching devices.Use three IR2101 chip to drive six composite power for realizing the change of phase.The cruising time of unmanned aircraft that using this driving system extended 20%than the usual H-bridge system.This system can even running stable at-25℃.The response rate of this system enhance 10%.
brushless direct current motor;three-phase fully-controlled bridge;composite power tube;IR2101
TP273
A
10.16157/j.issn.0258-7998.2016.09.001
国家自然科学基金(11372309;61304017);吉林省科技发展计划重点项目(20150204074GX);吉林省科技发展计划(20150520111JH);省院合作科技专项资金项目(2014SYHZ0004);中国科学院科技服务网络计划(STS计划)(KFJ-EW-STS-068)
2016-03-07)
何帅(1992-),男,硕士研究生,主要研究方向:伺服控制。
白越(1979-),通信作者,男,博士,副研究员,主要研究方向:飞行器动力学与控制,E-mail:baiy@ciomp.ac.cn。
中文引用格式:何帅,裴信彪,宫勋,等.多旋翼无人机直流电机驱动系统优化[J].电子技术应用,2016,42(9):2-5,9.
英文引用格式:He Shuai,Pei Xinbiao,Gong Xun,et al.Optimize driving system of direct current motor for multiple rotor unmanned aerial vehicle[J].Application of Electronic Technique,2016,42(9):2-5,9.
