基于工业测量系统的相机检校场可靠性分析
2016-11-28吴昊贾勇帅刘欣
吴昊,贾勇帅,刘欣
(山东科技大学测绘科学与工程学院,山东 青岛 266590)
基于工业测量系统的相机检校场可靠性分析
吴昊*,贾勇帅,刘欣
(山东科技大学测绘科学与工程学院,山东 青岛 266590)
通过利用工业测量系统Axyz/MTM对位于山东科技大学3D实验室内的数码相机检校场进行精密观测,根据该检校场的特点,设计观测方案来提高观测的精度。然后将观测数据进行处理,根据处理结果分析其可靠性,最终判断出该相机检校场的质量能够满足数码相机检校精度的要求。
工业测量系统;检校场;可靠性
1 引 言
近些年来,近景摄影测量作为一种测量方法因为其测量速度快、精度高、无需直接接触被测目标、数据易存储等优点而得到了快速发展。近景摄影测量所用到的数码相机都是普通的数码相机,不是专门为摄影测量而定制的数码相机,因此它们的内方位元素是未知的并且存在较大的光学畸变差[1]。为了确保摄影测量所用的数码相机能够满足测量精度要求,在每次进行摄影测量观测之前都需要对数码相机的内方位元素和光学畸变差进行精确检校,其检校精度的高低直接关系着测量精度的高低[2]。相机检校的主要方法是利用各式各样的数码相机检校场来对数码相机的内方位元素进行检校,因此有关相机检校场建立的各种理论和方法也得到了快速发展。而判断一个数码相机检校场能否对相机的各种参数进行精确检校,还需要对检校场中的标志点进行精确观测,分析其建立的可靠性与合理性,我们采用Axyz/MTM工业测量系统对建立完毕的室内数码检校场中的标志点进行精密测量。
2 数码相机检校场的构建
2.1 数码相机检校场
普通数码相机检校场一般应该满足以下几个条件:
(1)检校场需要有一定的深度。
(2)标志点的位置关系要长期稳定。
(3)标志点要便于利用经纬仪或全站仪进行精密观测[3]。
本次实验观测的检校场位于山东科技大学青岛校区3D实验室内,由400多个标志点构成,分布近似呈4个平面,标志点按照10×10×4排列,整个检校场所占空间约为 170 m3。
2.2 像控点标志
标志点不仅要保证长期稳定且形状应有利于进行图像处理时精确提取像点坐标,同时还要便于进行精密观测。为了满足要求,该标志点中心采用精密十字丝刻画,固定在金属杆上,如图1、图2所示。
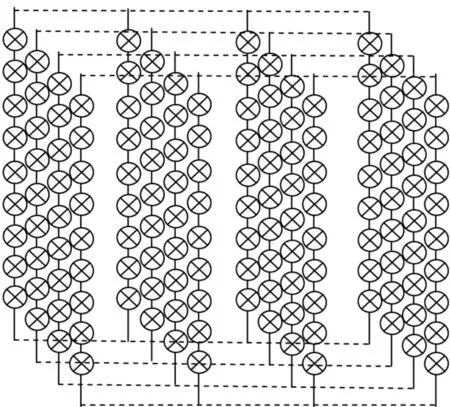
图1 数码相机检校场
图2 像控点标志
3 观测方案
3.1 测量理论
工业测量系统Axyz/MTM是利用两台电子经纬仪对目标点进行观测获取标志点三维坐标,其原理是利用空间前方交会,如图3所示:
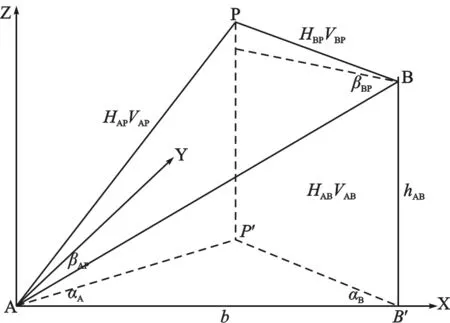
图3 空间前方交会
图中A和B分别代表了两台电子经纬仪,P为其中某一个标志点。b为A和B连线的水平投影长度,hAB为A和B的高差,αA,αB为AP,BP在水平面上的投影与X轴的夹角,HAP为经纬仪A观测P点的水平方向值,VAB为相应的天顶距。利用空间前方交会计算P点坐标的公式为:
(1)
而系统自带软件Axyz在进行数据处理时是通过光束法平差模型解算出目标点的三维坐标。光束法平差解法相对于空间前方交会的区别在于它以共线方程作为数学模型,将外方位元素和像点坐标放在一起进行计算。它的解算结果实际上是提供了一个近似解,通过多次迭代来获取最佳值[4]。相比较而言,光束法平差的解算精度较高,其公式推到在此不再赘述。
3.2 测量方案设计
(1)通过空间前方交会观测目标点时,观测精度与交会点相对仪器的位置以及夹角有着密切的关系。当夹角为90°时,精度最高,由此考虑到当两台测量仪器相对于整个检校场中心点的夹角为90°时,所有标志点的整体观测精度最高[5]。
(2)在观测之前需要通过两台仪器的互瞄以及同时瞄准标准尺来进行相对定向和绝对定向,标准尺在摆放时尽量要与基线b平行且在基线两侧各测一次,取中值来提高定向精度。
(3)观测标志点时要保证光源充足,必要时利用手电筒等照明装置照准标志点保证标志点有足够的亮度。其次两名观测者在观测时要仔细调焦消除误差,观测标志点的位置要达成一致,保证两台仪器观测同一标志点时照准的位置相同
(4)要保证观测环境无明显大风,地面坚实不松软,仪器架设牢固,整个系统稳定。
3.3 不同测站数据的转换
在实际的观测中,由于标志点数量较多,分布比较密集,造成了若只在一个测站观测,无法将全部标志点观测完毕。因此就只能采取换站的方法将所有的标志点全部观测记录下来。然而这其中就又涉及了一个问题:每换一次站就是一个新的测量坐标系,因此,不同测站观测的数据是位于不同的测量坐标系内的。因此在进行数据处理之前,要先将两次观测的数据统一到一个坐标系中。为了解决这个问题,我们通常采取七参数坐标转换法来进行坐标转换,在七参数模型中,有7个未知参数,即3个坐标平移量(△X,△Y,△Z),3个坐标轴的旋转角度(ωxωyωz),还有1个尺度因子m,通过至少观测3个公共点,计算出这7个参数,其他标志点的坐标就可以通过坐标转换式(2)进行坐标转换[6]。
(2)
虽然理论上我们只需要有3个公共点就可以进行坐标的转换,但实际上在公共点的测量时,需要选取尽量多的公共点来进行坐标转换。且选取的公共点应该尽量位于不同高度,不同平面位置,分布均匀,这样转换结果才能够更准确。本次实验共选取了不同平面,不同位置,分布均匀的6个公共点,分布大致如图4所示:
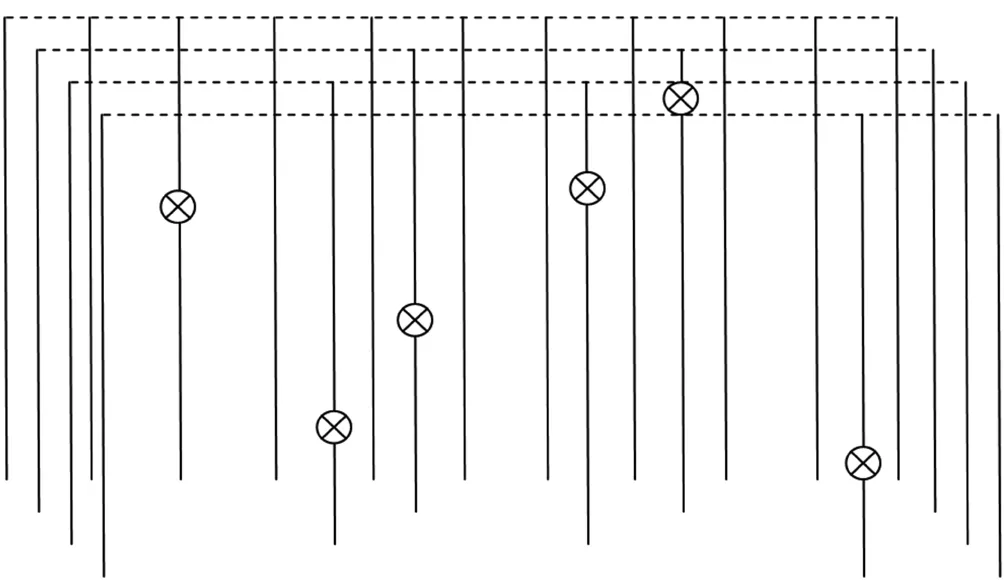
图4 公共点分布图
4 数据处理分析
本次实验观测数据采用系统自带软件进行数据处理,利用点位中误差m来进行精度判定如表1、图5所示:

(3) 公共点坐标转换精度 表1
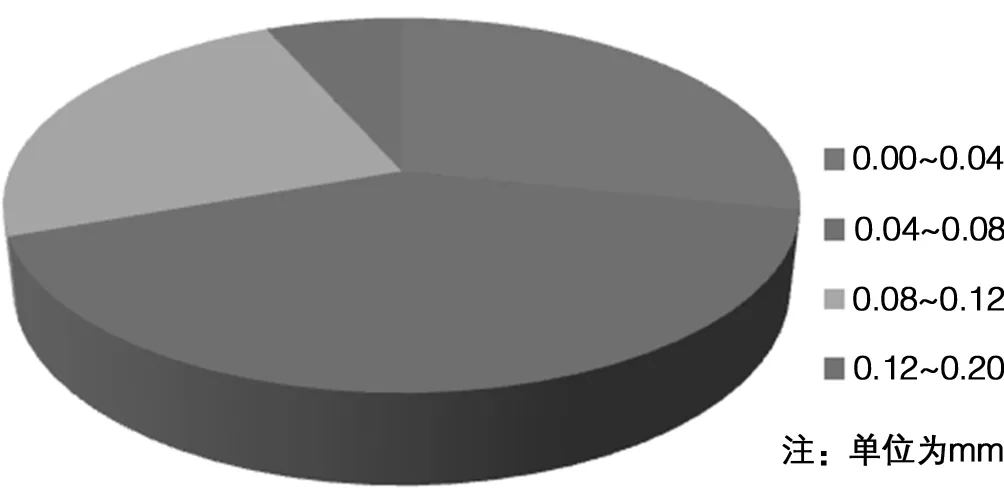
图5 标志点点位中误差分布图
由数据处理结果可以看出,点位中误差位于 0mm~ 0.04mm的标志点有116个;点位中误差位于 0.04mm~0.08mm的标志点有169个;点位中误差位于 0.08mm~0.12mm的标志点有98个;点位中误差位于 0.12mm~0.20mm的标志点有17个。点位中误差小于 0.1mm的标志点有356个,观测结果的精度相对较高。根据内方位元素检校误差式(4):
(4)
式中:H表示景深,m(f)为主距中误差
由于景深H为4 m,f为100 mm,计算可以得出m(X0,Y0)和m(f)均小于 0.002 mm,完全满足 0.01 mm的内方位元素检校精度要求。
5 结 语
本文通过对位于山东科技大学3D实验室内的相机检校场进行精密观测,并将观测数据进行处理,绝大部分标志点的点位中误差在 0.1 mm以下,内方位元素检校精度完全满足 0.01 mm的检校精度要求,证明了该相机检校场是可靠的,能够用来实现对相机进行检校。
[1] 裴智惠,马浩. 数码相机标定参数对摄影测量精度的影响分析[J]. 全球定位系统,2011(2):49~51.
[2] 李平. 非量测型数码相机的检校[D]. 西安:西安科技大学,2009.
[3] 许磊,王留召,余洁等. 一种新型的数码相机室内检校场的建立方法[J]. 北京测绘,2008(2):20~22.
[4] 闾海庆. 基于非量测数码相机的近景摄影测量数据处理方法研究[D]. 长沙:中南大学,2006.
[5] 于胜文,蔡强,刘尚国. 数码相机室内三维检校场的精密测量技术[J]. 测绘科学,2012(1):151~152.
[6] 尤聿坤. 测量基准转换方法研究与精度分析[D]. 沈阳:东北大学,2011.
Reliability Analysis of Camera Calibration Field Based on Industrial Measurement System
Wu Hao,Jia Yongshuai,Liu Xin
(Geomatics College of Shandong University of Science and Technology,Qingdao 266590,China)
Precision observation of digital camera field calibration in Shandong University of Science and Technology 3D lab through the use of industrial measurement systems Axyz / MTM,Design observation program according to the characteristics of calibration field to improve observations accuracy,and then observation data processing,analysis and evaluation of the results,and ultimately determine the quality of the digital camera calibration field is sufficient to meet the requirements of precision digital camera calibration.
industrial measurement system;field calibration;reliability
1672-8262(2016)05-80-03
P234.1
B
2016—04—28
吴昊(1991—),男,硕士研究生,主要研究方向:测绘工程。
