基于模型预测的永磁同步电机直接转矩控制及负载角限制
2016-11-26王艳霞
王艳霞
(河南经贸职业学院,郑州 450053)
基于模型预测的永磁同步电机直接转矩控制及负载角限制
王艳霞
(河南经贸职业学院,郑州 450053)
永磁同步电机电磁转矩和负载角之间的非线性关系,容易导致永磁同步电机失步,限制了其在高速度、高精度领域的应用。针对此问题,提出了一种基于模型预测的永磁同步电机直接转矩控制及负载角限制方法。详细介绍了永磁同步电机的离散时间状态空间模型,可用于提高状态预测精度。阐述了电机预测过程,并设计了一种评价函数,包括性能评价函数和限制评价函数,前者可用于消除电机电磁转矩和定子磁链幅值误差,以实现设定值跟踪;后者可用于限制负载角。为补偿测量和执行之间的延时,给出了一种延时补偿方法。最后,进行了仿真和实验研究,结果表明该方法具有良好的跟踪性能,可以提高直接转矩控制的控制性能,而且可以较好地限制电机的负载角。
模型预测控制;直接转矩控制;负载角限制;永磁同步电机
0 引 言
永磁同步电机具有优异的动态特性和控制性能,因而在工农业生产、军工、航天等领域的应用比较广泛[1-4]。直接转矩控制作为一种比较重要的控制方式,其算法结构相对简单、控制用电机参数较少、转矩动态响应快[5-7],而且具有很好的鲁棒性能,可以减小外部干扰、噪声、参数摄动、测量误差等因素的影响[8-9]。
直接转矩控制的基本原理可描述为:系统选择合适的空间电压矢量,控制定子磁链的运动并改变负载角(定、转子磁链之间的夹角),进而实现对转矩的直接控制[10]。但是电磁转矩和负载角之间的非线性关系,容易导致永磁同步电机失步,限制了其在高速度、高精度领域的应用[11-12]。为防止运行过程中永磁同步电机失步,需要限制其负载角的大小。近几年,国内外学者展开了相关研究。Luukko等人结合自适应控制和间接转矩控制,从而实现了负载角的限制[13]。Zhang等人采用空间电压矢量调制进行内埋式永磁同步电机的直接负载角限制,可以减小开关频率和转矩的波动[14]。Li和Lin等人提出了一种增磁增矩负载角恒定方法,可用于特殊工况下的导弹舵面负载模拟系统[15]。现有负载角限制的实现方法大体分为以下两类:线性控制器和调制解调器;非线性控制器和滞环调节器。随着数字控制技术的快速发展,为得到更好的控制性能,模型预测控制应运而生。所谓模型预测控制是指利用系统模型来预测和优化系统未来行为,其最大优势在于通过评价函数可以很好地处理系统非线性和限制问题[16-17]。
本文在现有研究的基础上,基于模型预测控制设计一种直接转矩控制和负载角限制方法,并通过仿真和实验验证本文所述控制方法的可行性和有效性。
1 PMSM预测模型
永磁同步电机的电流微分方程可表示:
(1)
(2)
其中,
(3)
上述各式中的Rs,Ld,Lq和ψf为永磁同步电机参数。通常情况下,这些参数是扰动的,但是为保证预测算法在很短的时间内计算完毕,本文将这些参数看成已知常数。
为便于在数字平台上实现控制算法,需将式(2)离散化处理。由式(3)可知,矩阵A和B包含时变参数ωe,所以二者均为线性时变矩阵,可表示为A=A[ωe(t)],B=B[ωe(t)];矩阵C为线性定常矩阵。可作如下假设:
(4)
其中Ts为采样时间。基于此假设,式(2)的离散形式:
(5)
(6)
这样,矩阵Ak可以表示成如下形式:
(7)
(8)
将式(8)代入式(7)可得:
(9)
同理,矩阵Bk可以表示:
(10)
综上所述,根据式(5)、式(9)和式(10)可得永磁同步电机的离散数学模型,可用于系统行为预测,另外,此模型计算量并不大,比较容易在DSP中实现。
2 预测控制
基于模型预测的永磁同步电机直接转矩控制框图如图1所示。由图1可知,整个控制过程主要包
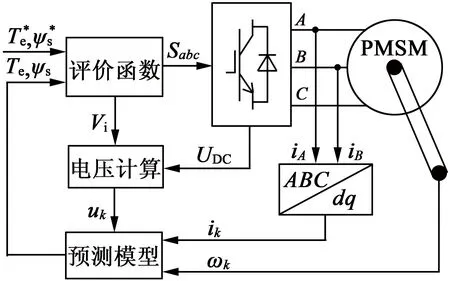
图1 基于预测模型的永磁同步电机直接转矩控制框图
括以下几个部分:
(1)测量:通过霍尔传感器测量永磁同步电机的定子电流;通过直流母线电压值和逆变器当前开关状态计算定子电压;通过光电编码器或观测器获得转子的旋转速度。
(2)预测:针对逆变器的8个开关状态(对应8个电压矢量),可利用测量得到的定子电流,定子电压和转速等数值,通过永磁同步电机预测模型计算其转矩和磁链的预测值。
(3)评价:利用上述转矩和磁链的预测值计算评价函数,选定最小评价函数对应的电压矢量为最优电压矢量。
(4)实施:将最优电压矢量对应的开关状态送入逆变器,以驱动永磁同步电机。
2.1 评价函数设计
评价函数主要由性能评价函数Jp和限制评价函数JR组成,即:
(11)
式中性能评价函数Jp的主要作用:消除电机电磁转矩和定子磁链幅值误差,以实现设定值跟踪。本文设计如下性能评价函数Jp:
(12)
式中:λT和λψ为权重系数。而限制评价函数主要用于限制负载角,本文设计如下限制评价函数:
(13)
式中:λδ是权重系数。
2.2 延时补偿
与传统的直接转矩控制相比,本文所述模型预测的直接转矩控制所需计算量相对较大,导致测量与执行之间存在一定延时。不带延时补偿的预测过程如图2(a)所示,大体可以描述为:首先,测量tk时刻的xk和ωe,k;然后,预测xk+1并计算Jk+1;最后,将选定好的uk送入逆变器。整个过程存在比较长的延时,期间如果状态变量发生变化,那么送入逆变器的电压矢量有可能不是最佳的。若忽略预测控制过程中的延时效应,将在一定程度上影响控制性能。为解决延时带来的不利影响,本文在预测控制过程中进行了延时补偿,如图2(b)所示。
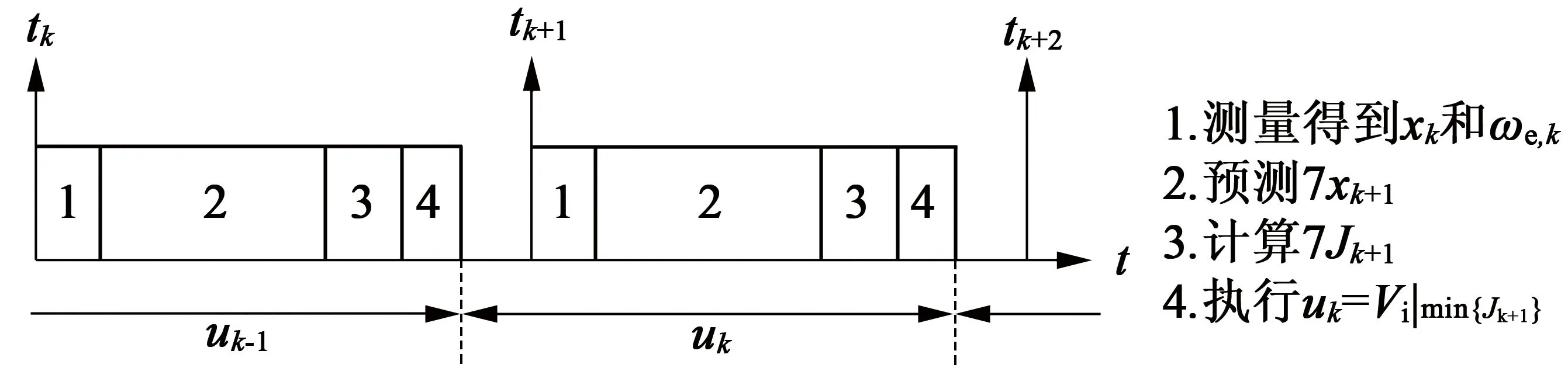
(a) 不带延时补偿的MPDTC
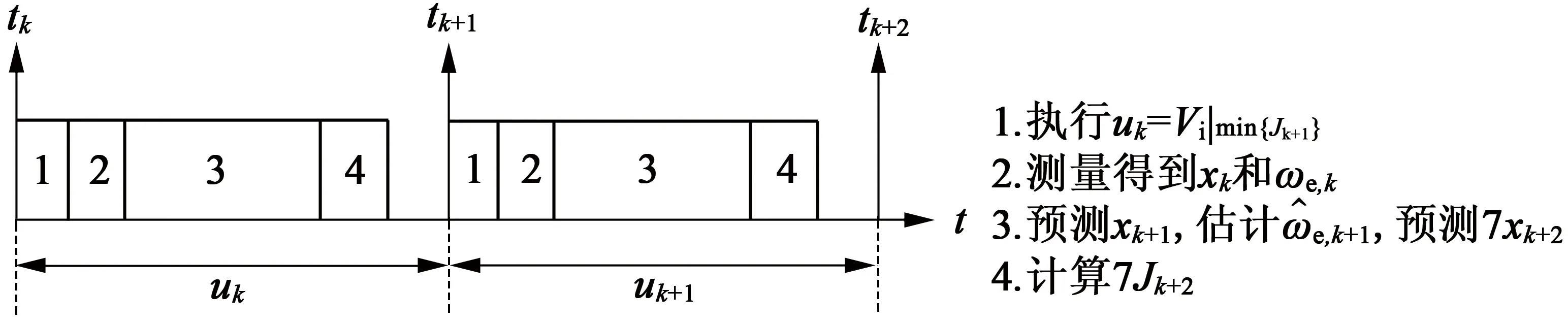
(b) 带延时补偿的MPDTC

(14)
3 仿真与实验
为验证上述控制系统和方法的有效性,本文进行了相关仿真和实验研究,并比较传统直接转矩控制(T-DTC)和基于模型预测的直接转矩控制(MP-DTC)的动态性能,永磁同步电机参数如表1所示。
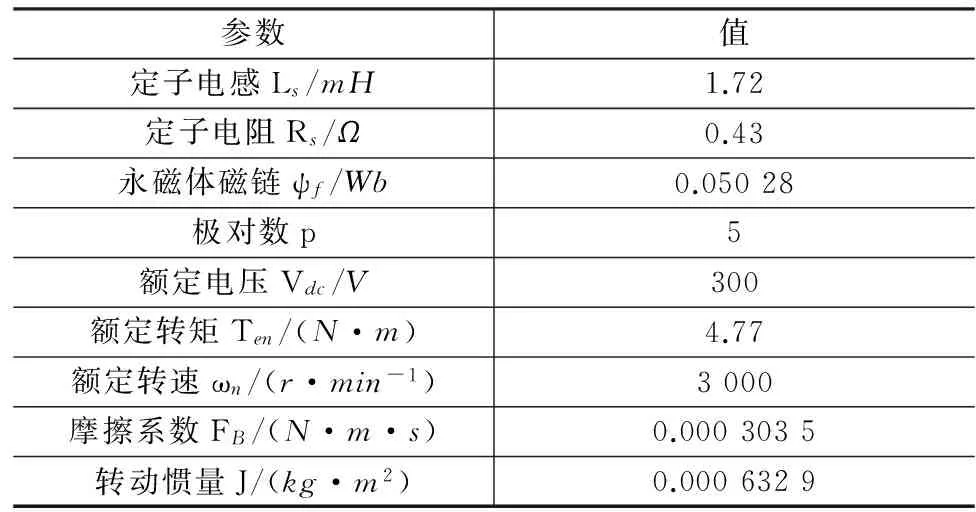
表1 永磁同步电机参数
3.1 仿真研究
仿真实验中,相关参数设置:逆变器直流母线电压为300V,开关频率最高10kHz;速度环采用传统并行PI控制,参考速度为1 500r/min,速度上升斜率为50 000r·min-1·s-1,比例系数为0.05,积分系数为30;负载转矩,即额定转矩大小为4.77N·m;参考转矩最大为15N·m。在传统直接转矩控制(T-DTC)中,转矩滞环宽度和磁链分别为0.1N·m和0.001Wb;在基于模型预测的直接转矩控制(MP-DTC)中,权重系数λT,λψ和λδ分别为1,30和500。仿真步长为2μs;系统采样周期为100μs。从转速跟踪、转矩跟踪、磁链跟踪和负载角限制等几个方面进行仿真实验,仿真结果如图3所示,其中图3(a)表示MP-DTC仿真曲线,图3(b)表示T-DTC仿真曲线。
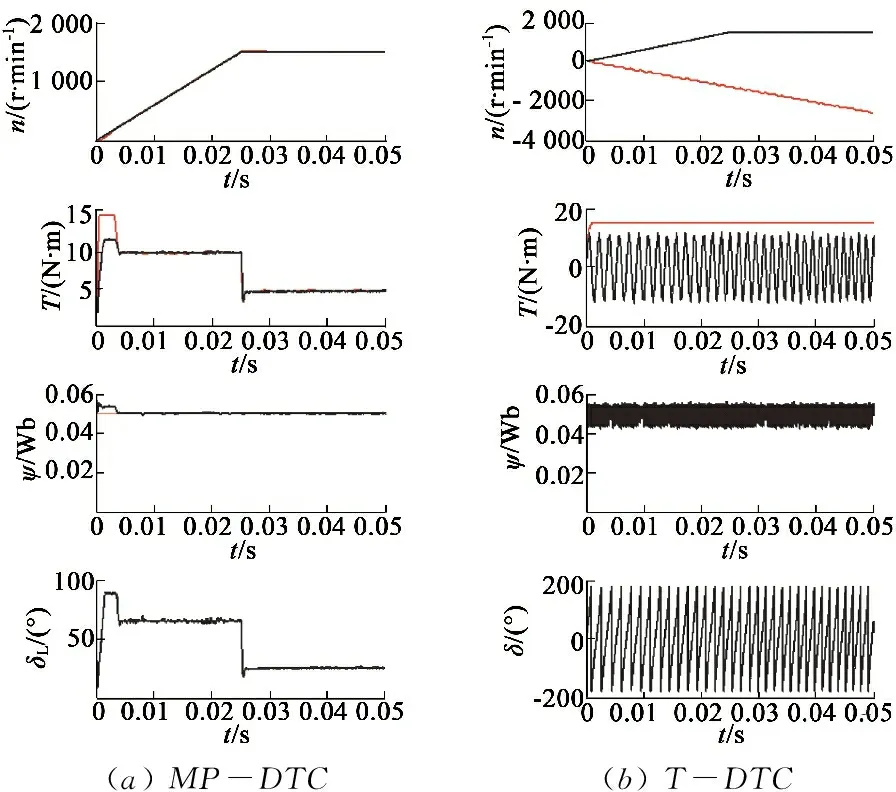
(a)MP-DTC(b)T-DTC
图3 仿真结果
由仿真结果可知,与传统直接转矩控制相比,本文所述直接转矩控制方法具有以下有益效果:
(1)永磁同步电机具有较好的转速跟踪效果。
(2)永磁同步电机具有较好的转矩跟踪效果。另外受限制评价函数的影响,在电机启动阶段虽然其转矩给定值达到了限制值15N·m,而电机转矩实际值则被限制在12N·m左右,并未跟踪给定值。
(3)永磁同步电机具有较好的磁链跟踪效果,但是在电机启动阶段,磁链跟踪并不高,主要原因在于:限制评价函数起主要作用,磁链跟踪受负载角限制的影响;在性能评价函数中,磁链跟踪所占权重比较小,所以磁链跟踪的重要性要次于转矩跟踪。
(4)由负载角响应曲线可知,负载角被限制在90°左右,表明本文所述直接转矩控制对负载角限制的有效性。
3.2 实验研究
首先,测试两种控制方法下电机的转矩动态性能,实验结果如图4所示,其中图4(a)为T-DTC下的转矩动态性能响应曲线;图4(b)为MP-DTC下的转矩动态性能响应曲线。给定转矩在-3N·m和3N·m之间方波变化,变化频率为10Hz。由图4可知,虽然两种直接转矩控制方法都具有比较好的转矩动态响应特性,但基于模型预测的直接转矩控制方法具有精确离散化的数学模型和延时补偿,所以永磁同步电机的转矩波动相对较小。
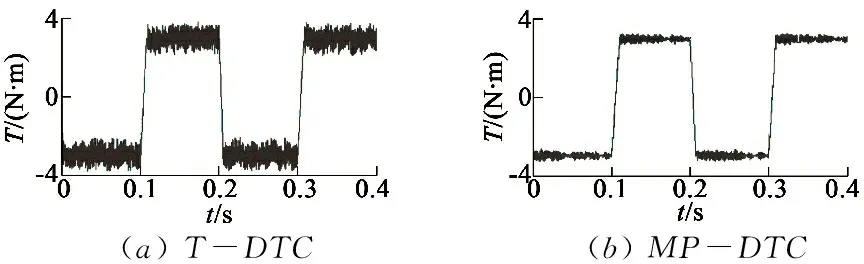
(a)T-DTC(b)MP-DTC
图4 转矩动态响应性能
然后,测试两种控制方法下电机的稳态性能,实验结果如图5所示,其中图5(a)为T-DTC下的稳态性能响应曲线;图5(b)为MP-DTC下的稳态性能响应曲线。从图5可知,与传统直接转矩控制方法相比,在本文所述的直接转矩控制方法下,转速、转矩、磁链、负载角的波动均比较小。
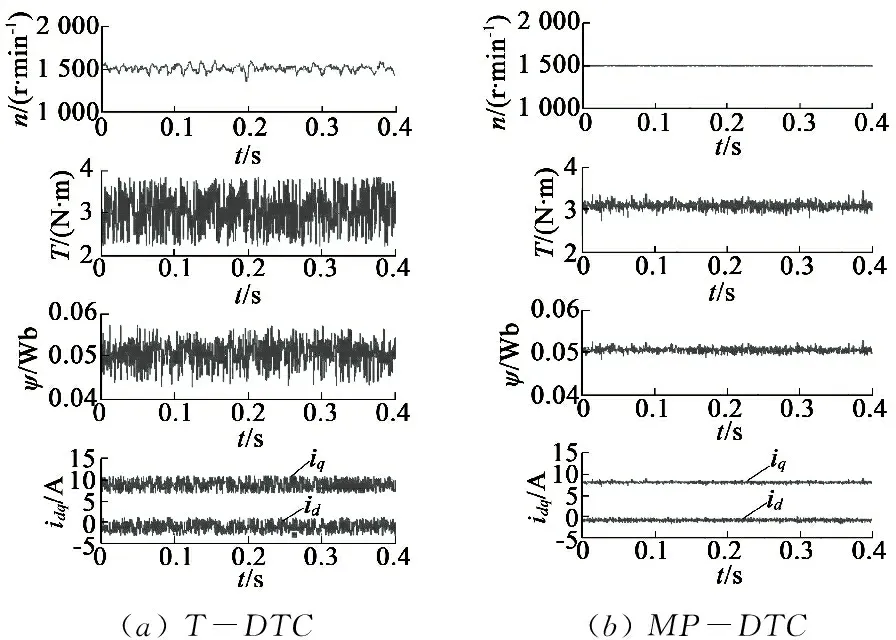
(a)T-DTC(b)MP-DTC
图5PMSM系统稳态性能
最后,验证负载角限制的有效性。在转矩开环的情况下,设置转矩给定值为4.77N·m,负载转矩为3N·m,另外本文还设置了一个δmax,并令δmax=20°。在d-q旋转坐标系下,基于本文所述的直接转矩控制方法电机负载角响应曲线如图6所示。理论上,转矩给定值4.77N·m对应的电机负载角为:
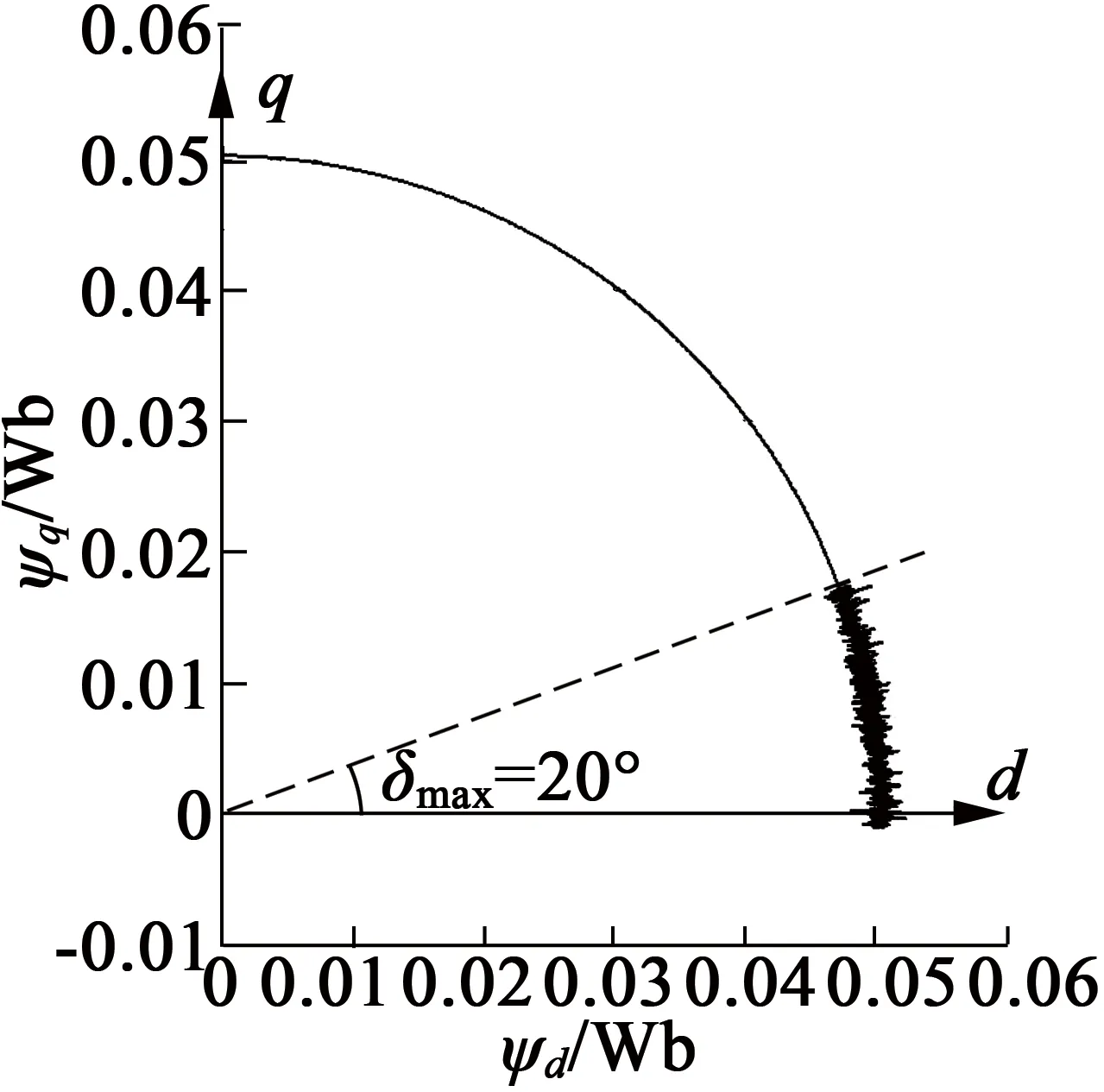
图6 负载角限制实验结果
但是受评价函数的影响,负载角被限制在20°,并没有达到25.64°。表明了负载角限制方法的有效性。
综上所述,从仿真和实验结果可知,本文所述方法具有良好的跟踪性能;可以提高直接转矩控制的控制性能;能够减小转速、转矩、磁链、负载角的波动;而且可以较好地限制电机的负载角。
4 结 语
传统永磁同步电机直接转矩控制容易出现失步,会降低系统的控制精度,为此本文设计了一种基于模型预测的永磁同步电机直接转矩控制方法。首先推导出了永磁同步电机的预测模型及精确离散化方法,同时设计了合理的预测控制过程。为实现电机负载角限制,本文设计了限制评价函数,并给出了延时补偿方法。最后,针对本文所述的方法进行了仿真和实验研究,并与传统直接转矩控制方法进行比较。仿真结果表明,本文所述方法具有良好的跟踪性能;可以提高直接转矩控制的控制性能;而且可以较好地限制电机的负载角。基于模型预测的永磁同步电机直接转矩控制及负载角限制方法为解决电机失步提供了一种新颖的思路。
[1] 庄尚,李程程,牛圆圆.基于DSP的矿井提升机永磁同步电机DTC调速系统[J].煤矿机械,2013,34(8):88-90.
[2]ROJASCA,YUZJI,SILVACA,etal.Commentsonpredictivetorquecontrolofinductionmachinesbasedonstate-spacemodels[J].IEEETransactionsonIndustrialElectronics,2014,61(3):1635-1638.
[3]CHEESHENL,LEVIE,JONESM,etal.FCS-MPC-Basedcurrentcontrolofafive-phaseinductionmotoranditscomparisonwithPI-PWMcontrol[J].IEEETransactionsonIndustrialElectronics,2014,61(1):149-163.
[4]PREINDLM,BOLOGNANIS.ModelpredictivedirecttorquecontrolwithfinitecontrolsetforPMSMdrivesystems,part1:maximumtorqueperampereoperation[J].IEEETransactionsonIndustrialInformatics,2013,9(4):1912-1921.
[5]PREINDLM,BOLOGNANIS.ModelpredictivedirecttorquecontrolwithfinitecontrolsetforPMSMdrivesystems,part2:fieldweakeningoperation[J].IEEETransactionsonIndustrialInformatics,2013,9(2):648-657.
[6]AGUILERARP,LEZANAP,QUEVEDODE.Finite-control-setmodelpredictivecontrolwithimprovedsteady-stateperformance[J].IEEETransactionsonIndustrialInformatics,2013,9(2):658-667.
[7]CORTESP,RODRIGUEZJ,SILVAC,etal.Delaycompensationinmodelpredictivecurrentcontrolofathree-phaseinverter[J].IEEETransactionsonIndustrialElectronics,2012,59(2):1323-1325.
[8]LEEJH.Modelpredictivecontrol:reviewofthethreedecadesofdevelopment[J].InternationalJournalofControlAutomationandSystems,2011,9(3):415-424.
[9]DROBNICK,NEMECM,NEDELJKOVICD,etal.PredictivedirectcontrolappliedtoACdrivesandactivepowerfilter[J].IEEETransactionsonIndustrialElectronics,2009,56(6):1884-1893.
[10]VARGASR,AMMANNU,HUDOFFSKYB,etal.Predictivetorquecontrolofaninductionmachinefedbyamatrixconverterwithreactiveinputpowercontrol[J].IEEETransactionsonPowerElectronics,2010,25(6):1426-1438.
[11]KIMS,YOONY-D,SULS-K,etal.Maximumtorqueperampere(MTPA)controlofanIPMmachinebasedonsignalinjectionconsideringinductancesaturation[J].IEEETransactionsonPowerElectronics,2013,28(1):488-497.
[12]PHAMDC,HUANGS,HUANGK,etal.UnitypowerfactorcontrolinsensorlessPMSMdrivesystems:ADSP-basedimplementationapproach[J].ICICExpressLetters,PartB:Applications,2012,3(2):383-388.
[13]LUUKKOJ,PYRHONENO,NIEMELAM,etal.Limitationoftheloadangleinadirect-torque-controlledsynchronousmachinedrive[J].IEEETransactionsonIndustrialElectronics,2004,51(4):793-798.
[14]ZHANGJun,XUZhuang,TANGLixin,etal.Anoveldirectloadanglecontrolforinteriorpermanentmagnetsynchronousmachinedriveswithspacevectormodulation[C]//ProceedingsoftheSixthInternationalConferenceonPowerElectronicsandDriveSystems,KualaLumpur,Malaysia.IEEE,2005:607-611.
[15] 李兵强,林辉.面装式永磁同步电机增磁增矩负载角恒定控制[J].电机与控制学报,2010,14(5):56-60.
[16]BEERTENJ,VERVECKKENJ,DRIESENJ.Predictivedirecttorquecontrolforfluxandtorqueripplereduction[J].IEEETransactionsonIndustrialElectronics,2010,57(1):404-412.
[17]BOUZIDIB,YANGUIA,MASMOUDIA.PotentialitiesofDTCstrategiesinpositionregulation:applicationtorobotics[J].Compel,2012,31(1):206-223.
Model Predictive Direct Torque Control for PMSM with Load Angle Limitation
WANGYan-xia
(Henan Economy and Trade Vocational College,Zhengzhou 450053,China)
It is easy to cause step out because of the nonlinear relation between electromagnetic torque and load angle in permanent magnet synchronous motor (PMSM). As a result, its application in many fields required high speed or precision is limited. The purpose of this paper is to describe a model predictive direct torque control (MP-DTC) with load angle limitation for PMSM drive system. An exact discrete-time state-space model of PMSM was presented, which improved the state prediction accuracy. And the forecast process was also expounded. An evaluation function was designed, including performance evaluation function and limitation evaluation function. The former can be used to eliminate the error of electromagnetic torque and stator flux linkage amplitude and realize the setpoint tracking. The latter can be used to limit load angle. To eliminate the time delay between measurement and execution, a time delay compensation method was presented. Finally, the simulation and experimental study were carried on. The results show that the method described in this article has good tracking performance. It can improve the control performance of direct torque control and has better load angle limitation of the motor.
model predictive control; direct torque control; load angle limitation; permanent magnet synchronous motor (PMSM)
2016-03-02
TM341;TM351
A
1004-7018(2016)08-0126-05
王艳霞(1983-),女,硕士,讲师,研究方向为电子技术、控制技术。