基于PR调节器的电励磁同步电机系统仿真研究
2016-11-26王志川姜林林
王志川,姜林林
(中国矿业大学,徐州 221008)
基于PR调节器的电励磁同步电机系统仿真研究
王志川,姜林林
(中国矿业大学,徐州 221008)
在基于气隙磁场定向的电励磁同步电机矢量控制系统中,控制器多数采用PI调节器并且需要进行复杂的坐标变换,影响系统的动态和稳态性以及鲁棒性。分析了PR调节器的特点,并在电励磁同步电机数学模型的基础上,提出了一种基于PR调节器的电励磁同步电机矢量控制方法,同时该系统还加入了电流预控环节并采用混合磁链观测器。理论分析和仿真结果表明:基于PR调节器的电励磁同步电机的矢量控制方法可以很好地实现电励磁同步电机的四象限运行,并能保持气隙磁链的恒定,表现出了较好的控制性能。
电励磁同步电机;改进型PR调节器;磁链观测器;矢量控制
0 引 言
电励磁同步电机矢量控制系统为实现转矩、磁链的解耦控制采用气隙磁链定向[1],其控制方法多数采用基于PI调节器的转速电流双闭环控制,但由于PI调节器只能对给定的直流信号进行无静差跟踪控制,不能实现对交流信号进行相应的跟踪控制并且需要复杂的坐标变换,为了改进系统的控制性能,文献[2]提出了一种基于PR调节器的永磁同步电机的控制,虽然系统具有良好的鲁棒性,但其控制的电流谐波分量大且动态反应慢。文献[3]分析了气隙磁链定向的永磁同步电机控制系统,其调节器采用PI调节器,从仿真结果可以看出在磁链跟随性能方面尚有不足。
本文在分析PR调节器及电励磁同步电机的数学模型的基础上,提出了一种基于改进型PR调节器并结合了电流预控环节和混合磁链观测器的电励磁同步电机转速、电流双闭环矢量控制系统。该控制系统可以实现对交流信号的无静差控制并获得良好的控制性能。同时,混合磁链观测器采用文献[1]中的VM和IM构成的混合磁链观测器来实现电励磁同步电机的磁链跟踪,并且该系统前级采用加有整流器的有源前端来实现电励磁同步电机的四象限运行,最后通过MATLAB/Simulink仿真验证理论分析与控制方法的正确性。
1 电励磁同步电机数学模型分析
以电励磁同步电机为研究对象,建立其d-q轴坐标系下的简化数学模型,其磁链方程以及电压方程:
(1)
(2)
式中:usd,usq,isd,isq,ψsd,ψsq,Rs分别为定子绕组的d,q轴电压、电流、磁链、电阻;uf,if,ψf,Rf分别为转子绕组电压、电流、磁链、电阻;uD,uQ,iD,iQ,ψD,ψQ,RD,RQ分别为电机阻尼绕组的d,q轴电压、电流、磁链、电阻;Lsd,Lsq分别为d,q轴定子绕组自感;Lmd,Lmq分别为d,q轴定子绕组与转子绕组间的互感;Lf,LQ、LD分别为励磁绕组自感、d,q轴阻尼绕组自感;ωr为转子电气角速度。
电磁转矩方程:
(3)
式中:Te,TL,p分别为电磁转矩、负载转矩、电机极对数。
2 PR调节器
由于PI调节器对给定的直流信号实现无静差的跟踪控制,有限的增益使得其无法跟随交流信号。在电励磁同步电机的矢量控制系统中被控制量多为交流信号,采用比例谐振调节器可实现对交流信号的稳态无静差控制,并省去复杂的坐标变换过程。
2.1 传统PR调节器
传统的PR调节器,其传递函数:
(4)
式中:ω0为谐振频率,取工频为50 Hz,ω0=100 π;KR为比例系数。
当传统PR调节函数中KR=1,ω0=100 π时可得其幅频特性曲线如图1所示。只有在谐振频率f0=50Hz处增益为无穷大且相角为零。可见,当输入信号含有交流分量时PR调节器可以实现无静差的跟踪控制。

图1 传统PR调节器幅频特性曲线
2.2 改进的PR调节器
传统的PR调节器在谐振频率ω0附近的增益过高,且带宽太窄。较高的增益和过窄的频带易使系统对输入信号的频率参量过度敏感且易引起实际系统的波动[4]。因而,一种改进型PR调节器被提出,其传递函数:
(5)
式中:参数ωc的值决定了调节器的带宽,带宽随着其增大而增大,带宽为ωc/π=1 Hz。KR增大时,全频率增益都会随之增大,但谐振频率处的增大不大明显。
图2 为改进型PR调节器当ω0=100 π时,KP分别为0.01, 0.1, 1,10,ωc=π时的Bode图。可以看出随着KP的增大,谐振频带以外幅值增大明显,但谐振频率处幅值变化不大。
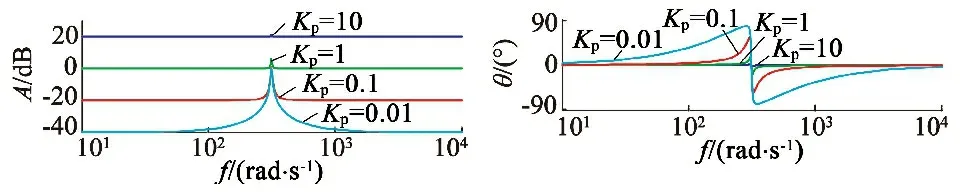
图2 改进型PR调节器KP变化时的Bode图
通过合理配置ωc,KP和KR的值,可以使调节器在稳态性能和抗干扰能力上都有所提高。本文的电流调节器采用这种改进型的PR调节器。
3 电励磁同步电机气隙磁链定向矢量控制
3.1 气隙磁链定向矢量控制
根据电励磁同步电机的数学模型以及空间矢量图进行简单推导[5]。定义m-t坐标系并使m轴与气隙磁链矢量重合,t轴与m轴正交,将定子三相电流合成矢量is以及励磁电流矢量if在m-t轴坐标系分解,其空间矢量图如图3所示。
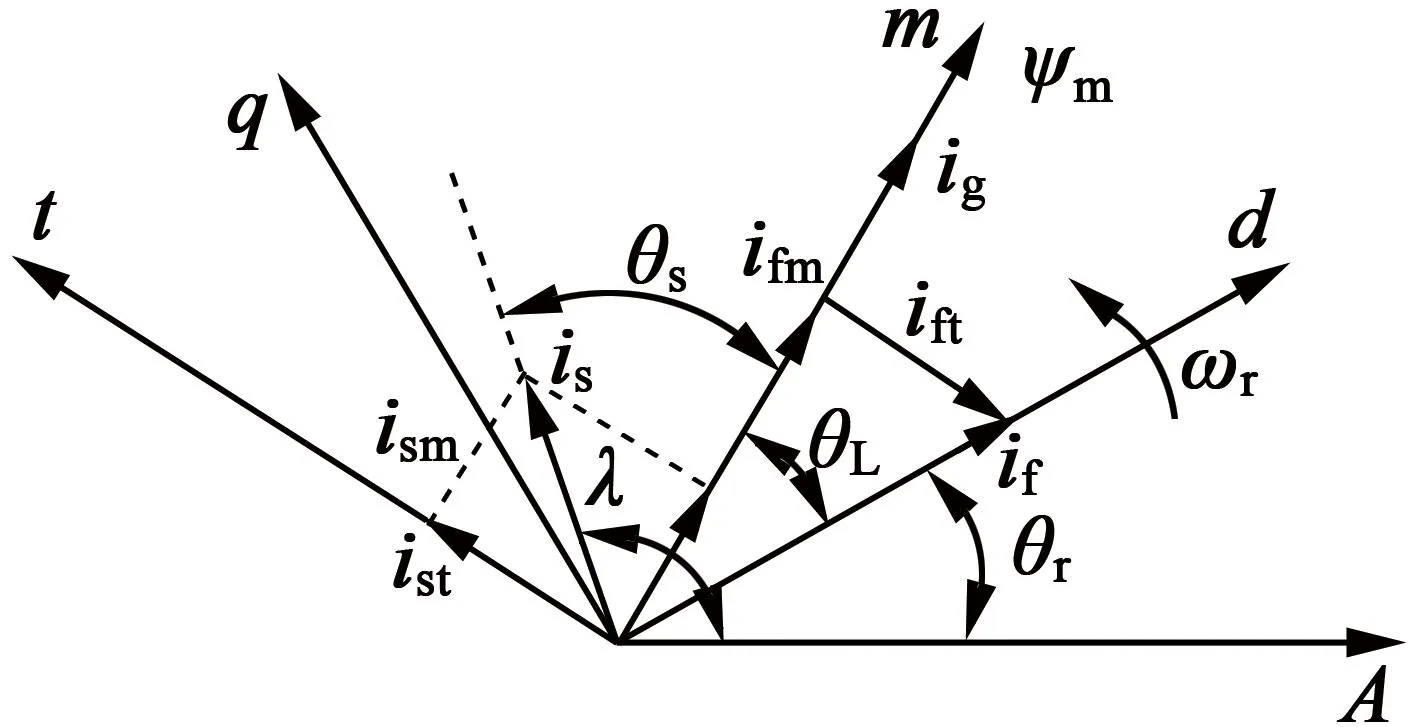
图3 电励磁同步电机气隙磁链定向矢量图
可得定子电流励磁分量ism与转矩分量ist与d-q轴坐标系相应分量关系[6]:
(6)
m,t轴与d,q轴气隙磁链满足下式:
(7)
将式(6)和式(7)代入式(3),可将电磁转矩方程重写:
(8)
可见,电励磁同步电机按照气隙磁链定向后可以实现电机的磁链与转矩的解耦控制,其前提是必须保证气隙磁链ψm(=ψsm)幅值恒定并对气隙磁链进行准确的定向[8-9]。

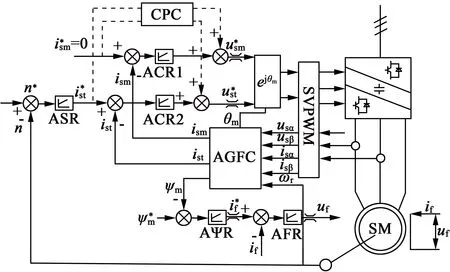
图4 电励磁同步电机气隙磁链定向矢量控制系统
3.2 电流预控环节
根据式(1)和式(2)可知,基于m-t轴坐标系的定子电压、电流、磁链矢量满足如下关系:
(9)
(10)
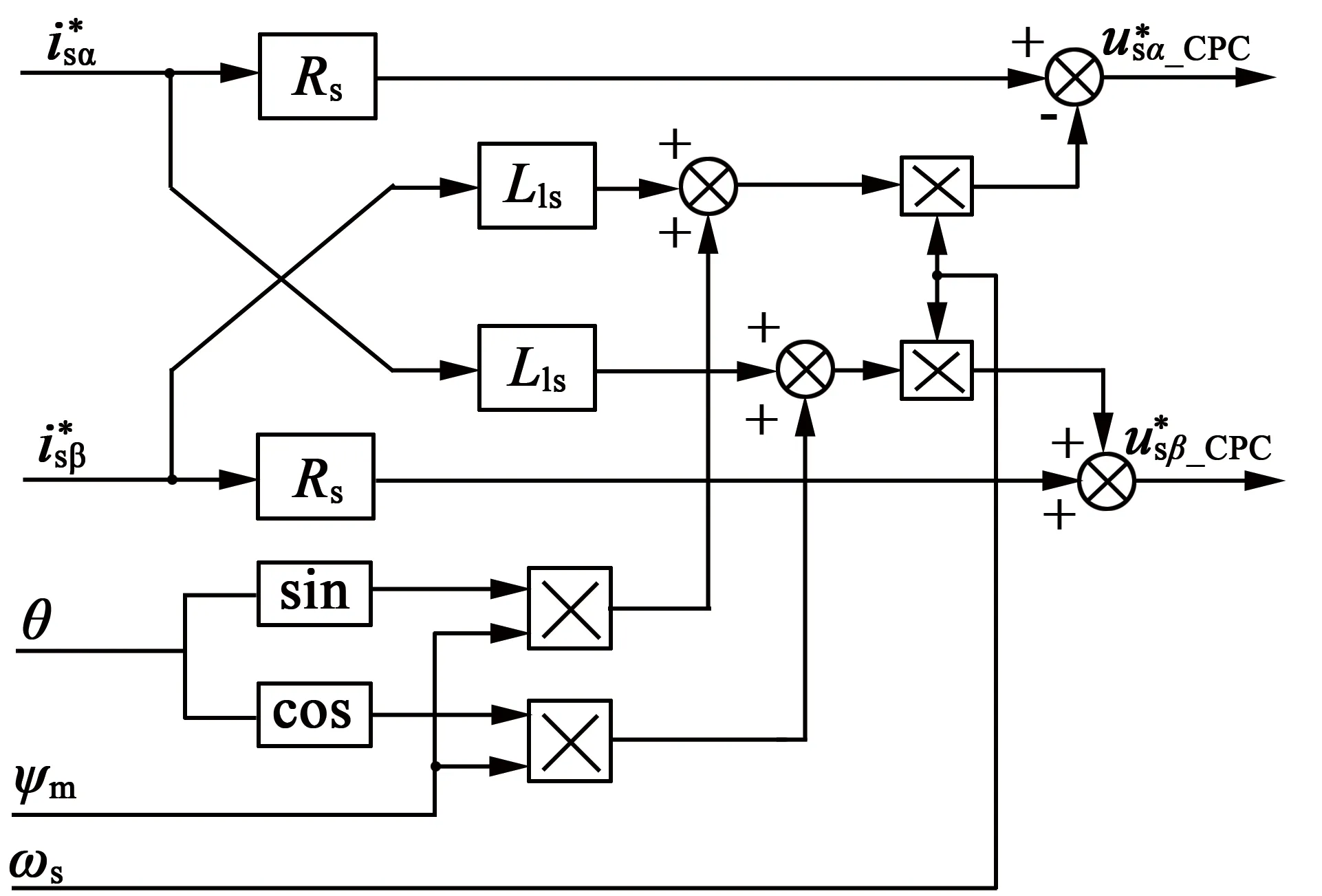
图5 电流预控环节结构框图
4 混合气隙磁链观测器
为准确获取气隙磁链的幅值与位置信息,本文采用基于VM-IM构成的混合磁链观测器,该观测器结合IM避免了VM存在的积分漂移及初始值设置问题[7-9],其计算框图如图6所示。
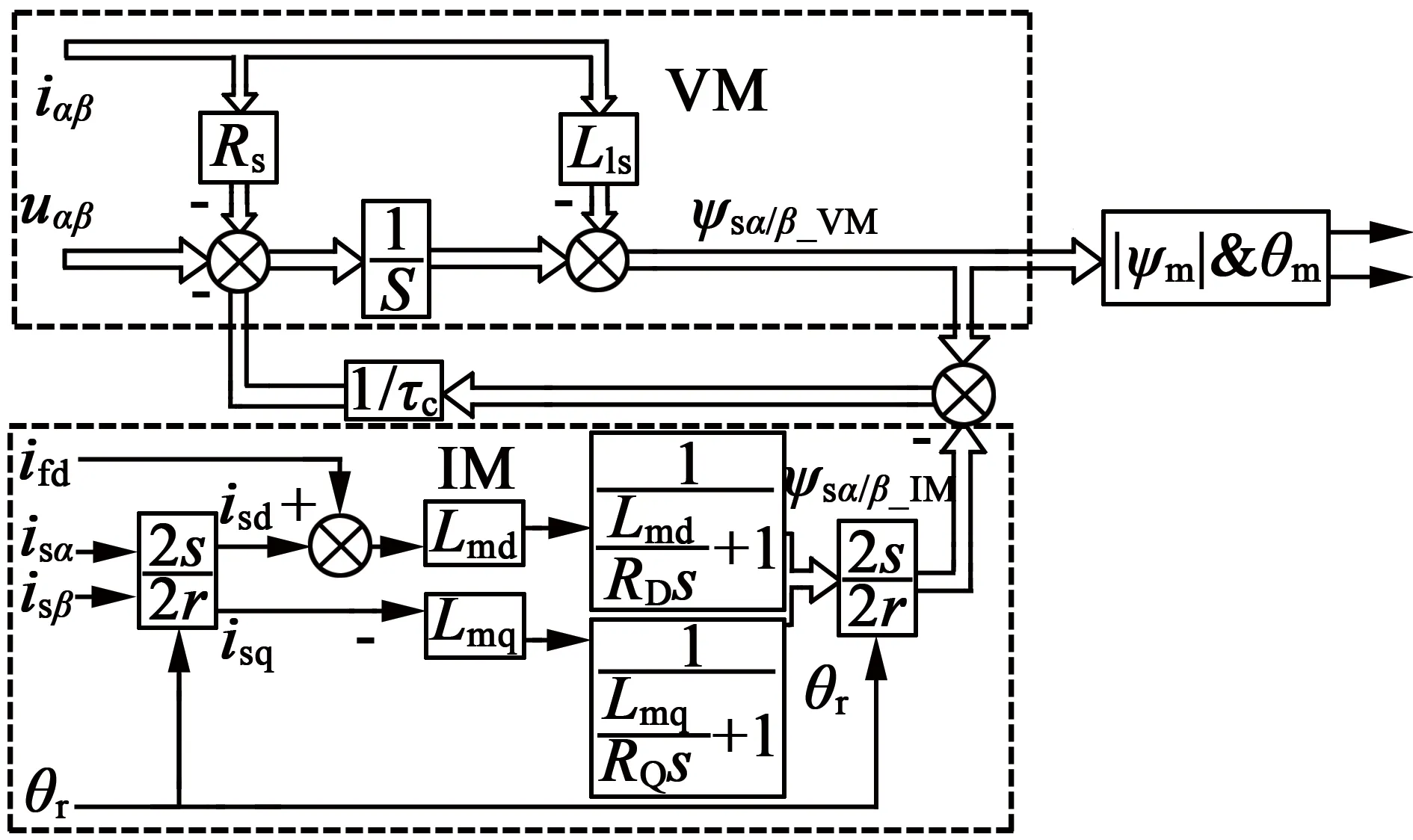
图6 混合磁链观测器框图
4.1 IM和VM
根据dq轴坐标系下的电压方程及气隙磁链方程,在忽略阻尼绕组漏抗影响时有:
(11)
(12)
将式(11)代入式(12)整理可得:
(13)
(14)
根据气隙磁链矢量ψm在d-q轴坐标系上的分量可以计算得到其幅值以及相对于d轴的位置角θL,也即电机的负载角。其控制框图及模型见图6所示IM部分。
在α-β静止坐标系下的电压模型:
(15)
(16)
4.2 基于VM-IM的混合气隙磁链观测模型切换机理分析
图6所示的VM-IM混合模型,根据VM模型获得在α,β轴上的分量ψsα_VM,ψsβ_VM,进而可以得到电压模型估算的磁链幅值|ψm_VM|及位置角θm_VM。IM是基于转子位置角定向并可获取α,β轴的分量ψsα_IM,ψsβ_IM。为了抑制传统VM中的纯积分漂移等问题引入反馈通道,反馈通道输入为 (ψsα/β_VM-ψsα/β _IM)增益为1/τc。反馈通道最终作为VM的反馈信号送入积分器。
以α轴为例,根据反馈控制可以得出混合磁链观测器的幅频特性[10]:
(17)
根据式(17)可知,引入反馈通道后,当电机运行于高速时,ω(τc/kσ)≫1,于是
(18)
显然,此时VM起主导作用。当电机运行于低速时,ω(τc/kσ)≪1,于是
(19)
显然,此时IM起主导作用。
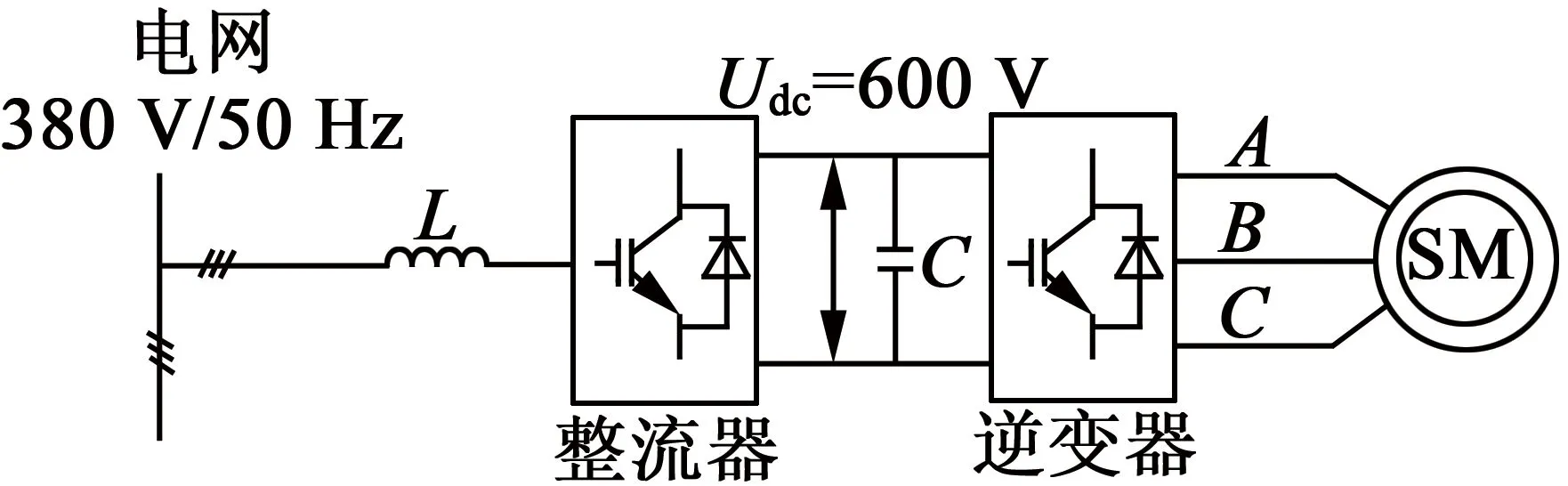
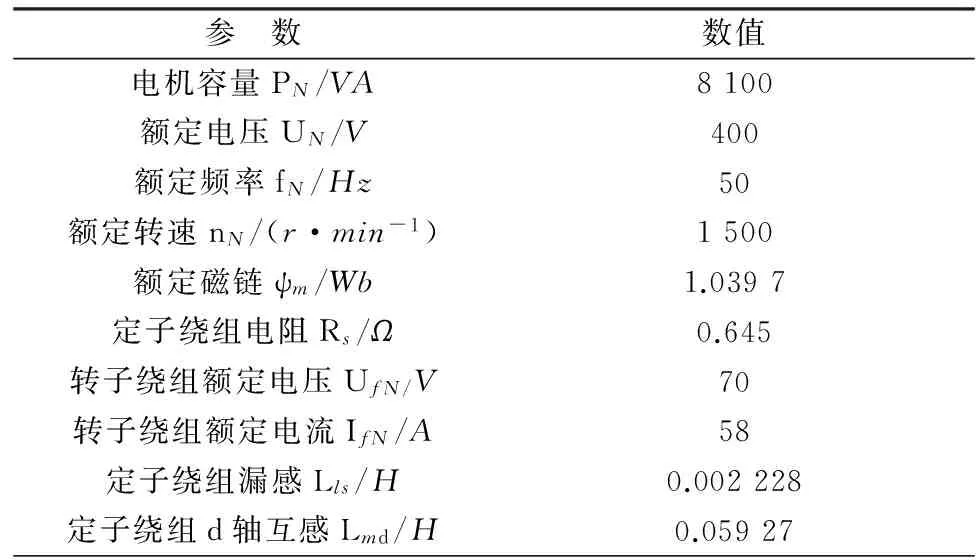
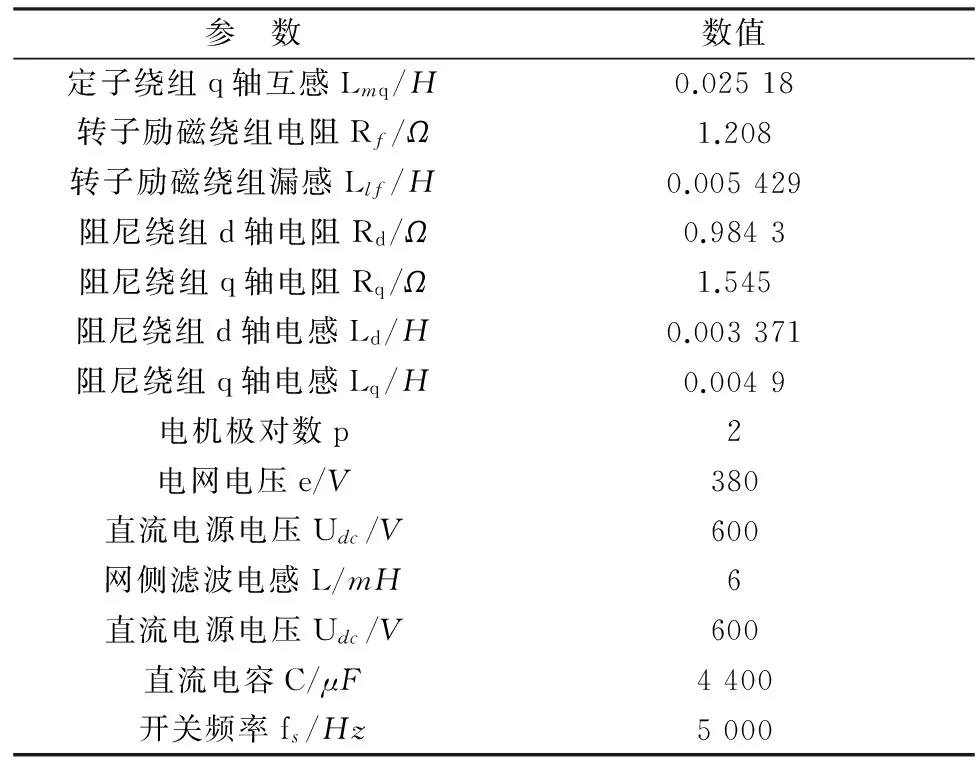
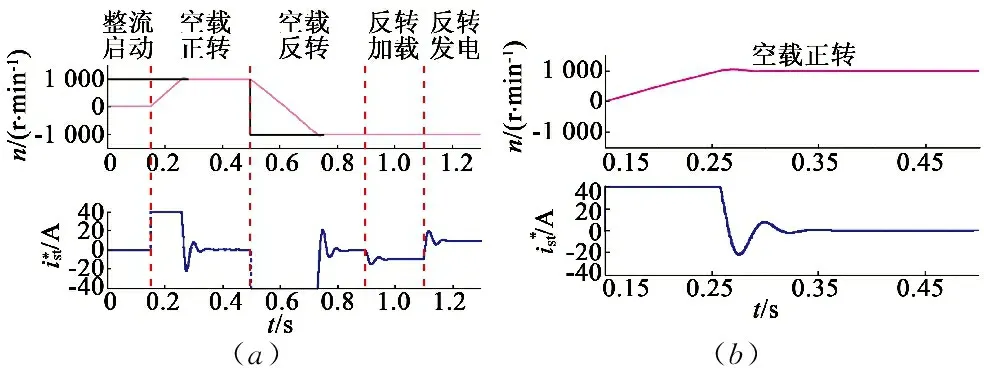
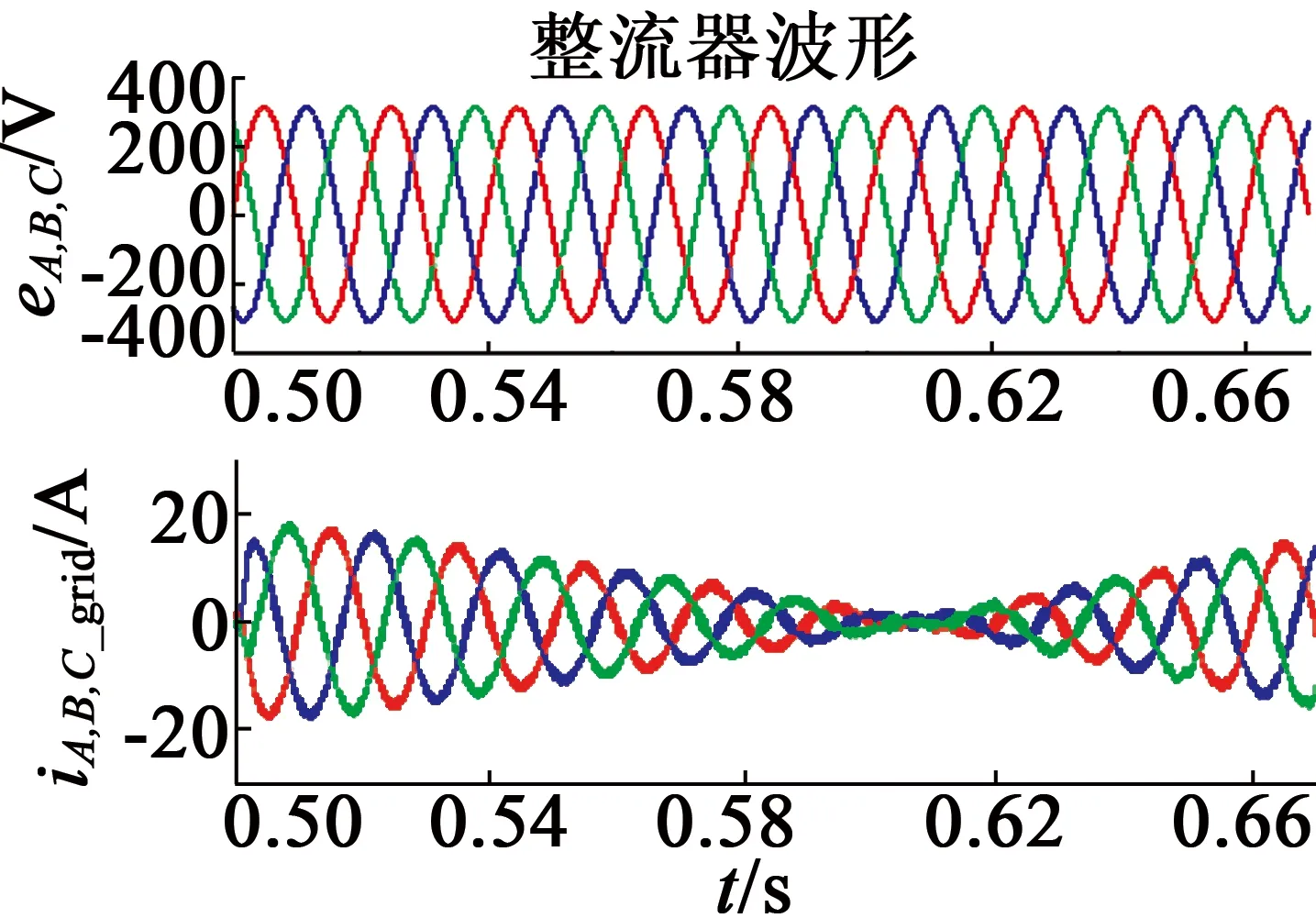
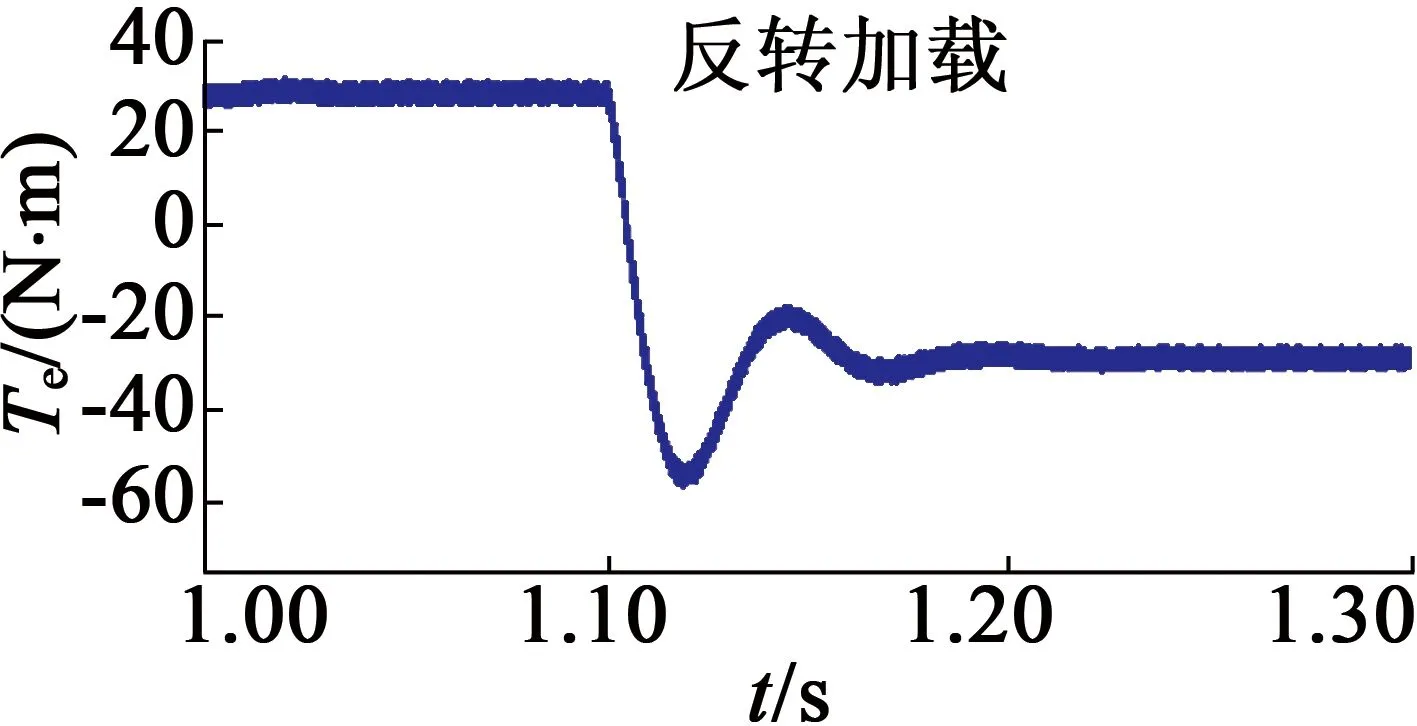
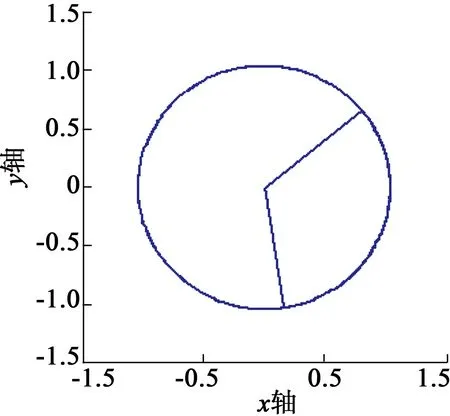
为了使两种模型可以平滑切换,按照工程应用设计:在n>10%时按VM工作,在n<5%时按IM工作,5% 为验证和评估本文所述的基于PR调节器的电励磁同步电机矢量控制系统,采用图4所示控制框图在MATLAB/Simulink中对图7所示实验拓扑进行仿真验证。仿真参数设置如表1所示。前级整流器最大输出的功率为37 kW。仿真中在0.15 s前首先使整流器启动直至直流母线电压Udc=600 V,随后励磁绕组工作,电机控制回路工作。 图7 实验结构框图 参 数数值电机容量PN/VA8100额定电压UN/V400额定频率fN/Hz50额定转速nN/(r·min-1)1500额定磁链ψm/Wb1.0397定子绕组电阻Rs/Ω0.645转子绕组额定电压UfN/V70转子绕组额定电流IfN/A58定子绕组漏感Lls/H0.002228定子绕组d轴互感Lmd/H0.05927 续 表 图8(a)、(c)表示了电机从空载正转启动、空载反转、反转突加负载至反转发电状态的整体仿真波形,从图8(a)、(c)可见在电励磁电机四象限运行的过程中,电机的转速均能较好地跟随指令转速n*=1 000r/min并且电机的定子电流(过载能力λ=4 IN)在动态和稳态过程中都能较快的稳定。 (a)(b) (c)(d) (e)(f) (g)(h) 图8 定子电流、电机转速仿真波形 图8(b)、(d)表示了电机空载正转启动的转速n、定子三相电流iABC的波形,显然电机转速超调小,约为σ=1%,且定子三相电流平稳快速地降为0,实现了快速启动。 图9(a)描述了电机电磁转矩的仿真波形,可见电机电磁转矩Te在四象限运行过程中能平稳快速地达到稳态,转矩脉动也极小。 (a) (b) (c) (d) (e) 图9(b)描述了前级整流器在电机由n=1 000 r/min至n=-1 000 r/min过程中的仿真波形,可见电机在动态过程中整流侧电流iABC_grid仍能与电网电动势eABC保持同相位,表现出了系统较强的动态调节性能。图9(d)、(e)描述了电机在n=-1 000 r/min条件下,P=3 000 W的电动状态转换为输入功率为P=-3 000 W的发电状态过程的电磁转矩Te和磁链矢量ψm的轨迹仿真图。可见本文所述系统能较好的适应电机的各种运行工况。图9(c)描述了前级整流器在电机在n=-1 000 r/min条件下,由电动状态转换至发电状态的整流侧电压、电流波形,可见在1.1 s之前三相电流iABC_grid与电网电动势eABC保持同相位,即电机处于电动状态,在1.1 s之后iABC_grid与eABC反相,表现系统处于发电状态。 图10描述了混合磁链观测器的输出|ψm|和θL的仿真波形,结合图8及图9各个阶段的仿真波形可见气隙磁链可以在各个阶段快速达到稳定指令值ψm=1.039 7 Wb,磁链矢量的ψm位置角θm也能在各种工况下稳定运行。 图10 气隙磁链、气隙磁链角仿真波形 综上所述,可见基于改进型PR调节器并结合电流预控环节和混合磁链观测器的电励磁同步电机转速、电流双闭环矢量控制系统方案可以适应电励磁同步电机的各种运行工况,并且具有优良的控制性能。 本文在分析电励磁同步电机数学模型及基于PR调节器的气隙磁链定向控制方法的基础上,详细分析了基于PR调节器的电流闭环和电流预控环节相结合的控制原理,同时介绍了反馈控制的VM-IM混合磁链观测器平滑切换机理。在MATLAB/Simulink仿真环境中,对基于PR调节器的电励磁同步电机矢量控制系统进行仿真,仿真结果表明所述的控制方法可以良好地适应电励磁同步电机的四象限运行工况,并表现出了较好的控制性能。 [1] 马小亮.高性能变频调速及其典型控制系统[M].北京:机械工业出版社,2010. [2] 严伟,周腊吾,浦清云,等.基于PR控制器的永磁同步电机弱磁控制[J].微特电机,2012,40(1):38-40. [3] 凌杰,卫一恒,陈昊,等.基于气隙磁链模型的大功率永磁同步电机速度控制[J].微特电机,2013,41(1):27-30. [4] 吴轩钦,谭国俊,宋金梅,等.基于混合磁链观测器电励磁同步电机矢量控制[J].电机与控制学报,2010,14(3):62-67. [5] 阮毅,陈伯时.电力拖动自动控制系统:运动控制系统[M].北京:机械工业出版社,2009. [6] 唐翼.基于磁链观测器的同步电机矢量控制系统研究[D].武汉:武汉理工大学,2014. [7] 吴苏敏,董立威,刘洋,等.基于气隙磁密波形优化的永磁同步电机结构[J].电机与控制应用,2014,41(3):12-16. [8] 赵纪龙,林明耀,付兴贺,等.混合励磁同步电机及其控制技术综述和新进展[J].中国电机工程学报,2014,34(33):5876-5882. [9] 谭国俊,吴轩钦,李浩,等.Back-to-Back双三电平电励磁同步电机矢量控制系统[J].电工技术学报,2011,26(3):36-43. [10] 陈丽香,王正祥.多磁路结构永磁电机气隙磁密波形优化[J].组合机床与自动化加工技术,2014(6):38-41. Simulation Research on the Electric Excitation Synchronous Motor System Based on PR Regulator WANGZhi-chuan,JIANGLin-lin (China University of Mining and Technology, Xuzhou 221008, China) In the electric excitation synchronous motor control system based on the air-gap magnetic field orientation, PI regulator is usually used ,and complex coordinate transformation is also needed, which influences the dynamic and steady-state of the system and robustness. PR controller was analyzed, then an electric excitation synchronous motor vector control method based PR controller was proposed and the method was based on the electric excitation synchronous motor mathematical model. Meanwhile, the current pre-control loop and mixed flux observer were also adopted in the system. Theory analysis and simulation results show that the electric excitation synchronous motor vector control based on PR controller can well realize four quadrant operation and maintain a constant air gap flux linkage, showing better control performance. electric excitation synchronous motor; improved PR regulator; flux estimator; vector control 2015-10-24 TM341 A 1004-7018(2016)08-0093-065 仿真及结果分析
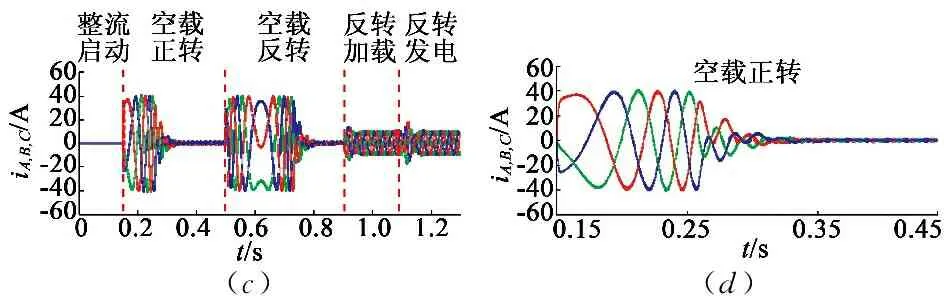
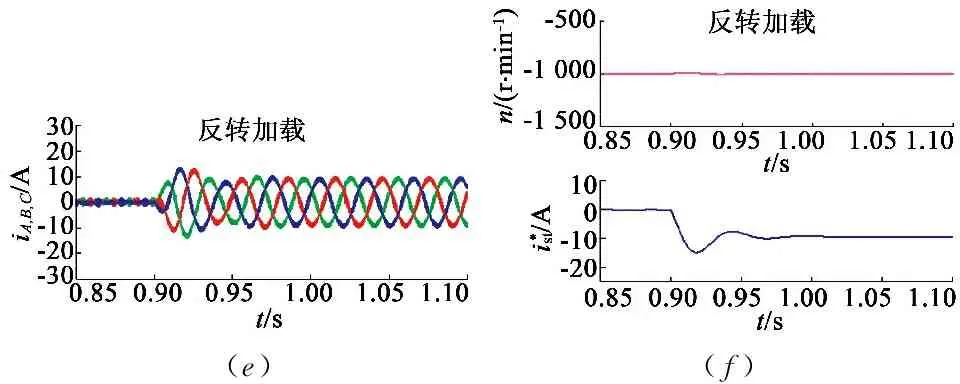
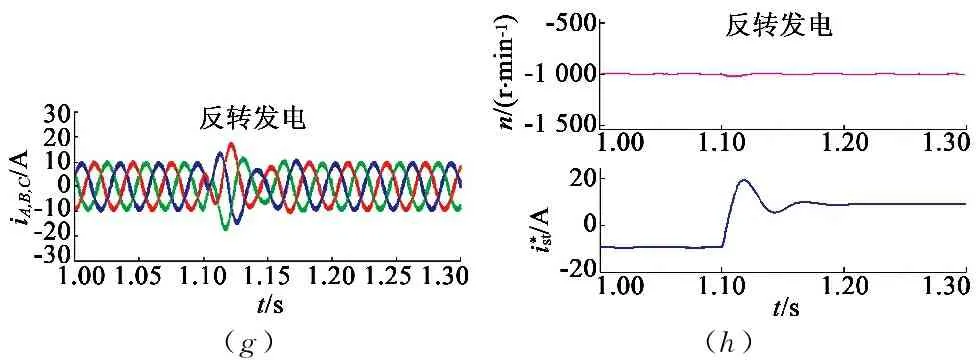

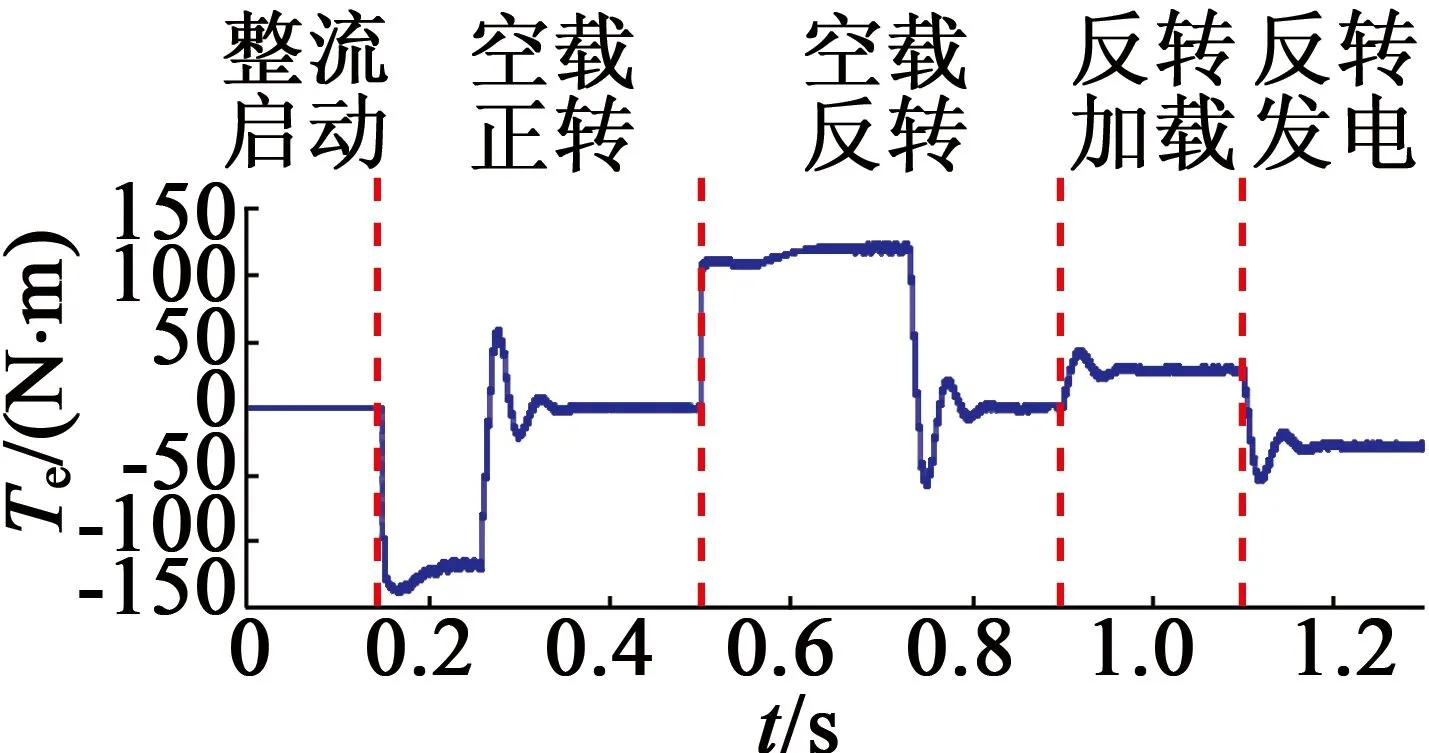


6 结 语