基于液压传动技术的机器手驱动系统设计
2016-11-23陈国君
陈国君,陈 云,陈 鹏
(1.东北电力大学 机械工程学院,吉林 吉林 132012;北华大学 汽车与建筑工程学院,吉林 吉林132012;3.吉雅教育培训学校,吉林 吉林 132012)
基于液压传动技术的机器手驱动系统设计
陈国君1,陈 云2,陈 鹏3
(1.东北电力大学 机械工程学院,吉林 吉林 132012;北华大学 汽车与建筑工程学院,吉林 吉林132012;3.吉雅教育培训学校,吉林 吉林 132012)
为了提高机器手的抓举能力,基于液压传动技术确定了液压工作时的流量,合理选择了液压元件,从而设计了机器手的驱动系统。实验结果表明,机器手的抓举能力提高,结构紧凑、动作平稳、耐冲击、耐振动、防爆性好。
机器手;驱动系统设计;液压传动技术
机器手是近几十年发展起来的一种高科技自动化生产设备。机器手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感技术和计算机技术等科学领域,是一门跨学科综合技术。机器手是模仿着人手的部分动作,按给定的程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。机器手一般由执行机构、传动系统、控制系统和辅助装置组成。执行机构的动作要由传动系统来实现。常用机器手传动系统分为机械传动、液压传动、气压传动和电力传动等几种形式。液压传动机器手是以压缩液体的压力来驱动执行机构运动的机器手,其主要特点是:介质源极为方便,输出力小,液压动作迅速,结构简单,成本低。本文基于液压技术确定液压工作时的流量,合理选择液压元件,从而设计了机器手的驱动系统。
1 液压缸或液压马达所需流量的确定
液压缸是将液压能转变为机械能且作直线往复运动(或摆动运动)的液压执行元件。它的结构简单、工作可靠。用它来实现往复运动时,可免去减速装置,并且没有传动间隙,运动平稳,在各种机械的液压系统中得到广泛应用。常用液压缸的结构有多种:按运动方式可分为直线往复运动式和回转摆动式;按结构形式可分为活塞式、柱塞式、多级伸缩套筒式,齿轮齿条式等;按受液压力作用情况可分为单作用式、双作用式;按安装形式可分为拉杆、耳环、底脚、铰轴等;按压力等级可分为16 MPa、25 MPa、31.5 MPa等。
1.1 活塞式液压缸的工作原理
本文采用的是活塞式液压缸,它可分为单杆式和双杆式两种结构,其固定方式由缸体固定和活塞杆固定两种,按液压力的作用情况有单作用式和双作用式。在单作用式液压缸中,压力油只供液压缸的一腔,靠液压力使缸实现单方向运动,反方向运动则靠外力(如弹簧、自重或外部载荷等)来实现;而双作用液压缸活塞两个方向的运动则通过两腔交替进油,靠液压力的作用来完成。单杆双作用活塞式液压缸示意图,如图1所示。它只在活塞的一侧设有活塞杆,因而两腔的有效作用面积不同。在供油量相同时,不同腔进油,活塞的运动速度不同;在需克服的负载力相同时,不同腔进油,所需要的供油压力不同,或者说在系统压力调定后,环卫垃圾车液压缸两个方向运动所能克服的负载力不同。
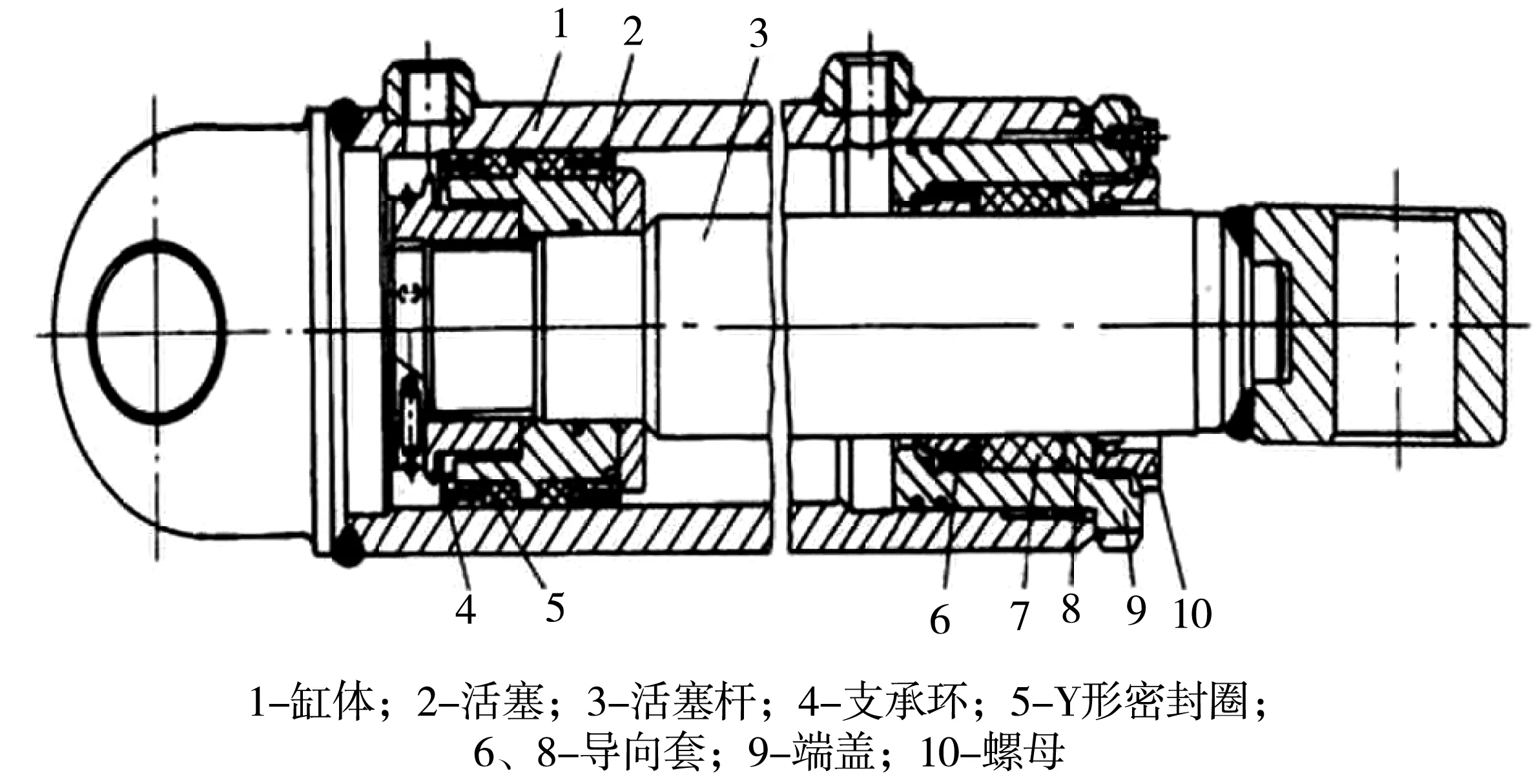
图1 单杆双作用活塞式液压缸
1.2 液压缸工作时流量的确定
液压缸工作时,所需流量
qV=A·v ,
(1)
式中: A为液压缸有效作用面积,m2;v为活塞与缸体的相对速度,m/s。
(1) 无杆活塞杆有效作用面积

(2)
式中:D为油缸内径,mm。

表1 各活塞的有效面积
(2) 有杆活塞杆有效作用面积
(3)
式中:d为活塞杆直径,mm。
经过计算可得各活塞的有效面积如表1所示,经过计算可得各液压缸流量如表2所示。

表2 各液压缸流量
查表得YMD30摆角90°,流量(内泄漏量)为300 mL/min;YMD300摆角270°,流量(内泄漏量)为470 mL/min[1-4]。
2 液压元件的选择
2.1 液压泵的选择
油泵作为液压系统的动力元件,是液压系统的心脏,它把原动机(电动机、柴油机等)输入的机械能(转矩和角速度)转换为液压能(压力和流量)输出,为执行元件提供压力油。液压泵的性能好坏直接影响到液压系统的工作特性和可靠性,在液压传动中占有及其重要的地位。液压泵按排量能否改变分为定量泵和变量泵;按进、出油口的方向是否可变分为单向泵和双向泵;按运动构件的形状和运动方式分为齿轮泵、叶片泵、柱塞泵、螺杆泵[5-7]。
目前在机械手上多数采用齿轮泵和叶片泵,而从流量特性来看,多数是采用定量泵。设计中采用PV2R双联叶片泵,已知系统压力为8 MPa,选取PV2R12,查机械设计手册表20-5-33选取其前泵排量V1为33 mL/r,后泵排量V2为12 mL/r,其允许最高转速为1 800 r/min,最低转速为750 r/min[8-10]。该泵使用普通液压油时,前泵的最高使用压力为14 MPa,后泵为16 MPa,满足系统要求的8 MPa。
前泵的流量
q=V·n ,
(4)
式中: V为泵的排量,mL/r;n为泵的额定转速,r/min。
qmax=33×1 800=59.4 L/min,
qmin=33×750=24.75 L/min .
后泵的流量
q=V·n ,
(5)
式中: V为泵的排量,mL/r;n为泵的额定转速,r/min。
qmax=12×1800=21.6L/min,
qmin=12×750=9L/min .
2.2 液压泵所需电机功率的确定
N=P·qmax/η ,
(6)
式中: N为油泵所需要的电动机功率;P为油泵的最大工作压力,Pa;qmax为油泵最大流量,m3/s;η为油泵总效率,一般叶片泵η=0.75~0.85;齿轮泵η=0.6~0.8;柱塞泵η=0.75~0.9。
前泵所需电机功率

后泵所需电机功率

2.3 液压阀的选择
液压阀的作用是控制液压系统的油流方向、压力和流量,从而控制整个液压系统的全部功能,如系统的工作压力,执行机构的动作程序,工作部件的运动速度、方向,以及变换频率、输出力或力矩等等。液压阀的性能是否可靠,是关系到整个液压系统能否正常工作的问题。
液压阀的分类有:(1)压力控制阀:主要控制执行机构输出力或输出转矩的大小,并确定液压泵及整个液压系统的工作负载,在过载时起到保护系统的作用;(2)流量控制阀:根据执行机构运动速度的要求供给所需流量;(3)方向控制阀:控制油流的通、切断或改变油流的方向,以控制执行机构的运动方向等。三类阀还可以相互组合,成为复合阀,以减少管路的连接,使结构更为紧凑,提高系统效率。液压传动系统,选择合适的液压阀,是使系统设计合理,性能优良,安装简便,维修容易,并保证该系统正常工作的重要条件。
根据本文液压的设计要求,液压阀的选择按额定压力和额定流量大于系统最高工作压力和通过该阀的最大流量的原则。选择换向回路的核心是选择换向阀的形式,以实现对于换向精度及换向平稳性的要求。一般来说,换向性能要求高,应选用机动换向阀或液动换向阀,若对于换向性能无特别要求,应选用电磁阀。根据本文设计液压系统要求,夹紧缸换向选用两位两通电磁阀,其他缸全部选用三位四通电磁换向阀。
为防止俯仰缸因自重自由下滑和伸缩缸在仰起一定角度后的自由下滑,本文采用单向顺序阀来平横。为保证夹紧缸夹持工件的可靠性,选用液控单向阀保压和锁紧。手臂升降缸为立式液压缸,为支承平衡手臂运动部件的自重,采用了单向顺序阀的平衡回路。
3 结 论
本文设计的液压式机器手的驱动系统具有很大的抓举能力(高达几百千克以上),其特点是结构紧凑、动作平稳、耐冲击、耐振动、防爆型好,但液压元件要求有较高的制造精度和密封性能,否则漏油将污染环境。
[1] 杨培元,朱福元.液压系统设计简明手册[M].北京:机械工业出版社,1994.
[2] 孙朝阳,李佳奕.管道连接件安装机器人液压系统管路精简设计[J].液压与气动,2015(10):36-39.
[3] 赵云伟,单根立.成品油管道泄漏控制机器人液压传动及控制系统的设计[J].机床与液压,2015,43(9):84-86.
[4] 邱可,曹江,韩超,等.水下机器人(ROV)液压系统的泄漏原因及对策[J].化工管理,2015(3):102-103.
[5] 孙新学,苏曙,荣茜,等.工程机械液压技术发展综述[J].河北建筑工程学院学报,2001,19(1):56-60.
[6] 周亚男,卢剑林.工程机械液压技术发展综述[J].科研,2015(27):224-224.
[7] 韩芳.工程机械液压系统动力匹配及控制技术设计[J].科学与财富,2015(15):117-118.
[8] 王乐勤,吴大转,郑水英,等.基于键合图法的叶片泵启动特性仿真[J].工程热物理学报,2004,25(3):417-420.
[9] 张帆,Martin,Behle,等.侧流道泵研究现状及发展趋势[J].排灌机械工程学报,2015,33(9):737-743.
[10] 黄道业.新型配流变量叶片泵闭死容腔压力特性及叶片力学分析[J].液压与气动,2015(1):20-25.
Drive System Design Of Mechanical Hand Based On Hydraulic Drive
CHEN Guo-jun1,CHEN Yun2,CHEN Peng3
(1.School of Mechanical Engineering,Northeast Dianli University,Jilin Jilin 132012;2.School of Automobile and Architecture Engineering,Beihua University,Jilin Jilin 132012;3.Jiya Education Training School,Jilin Jilin 132012)
In order to improve the capability of catch,the paper gets the fluid flow during hydraulic drive working based on hydraulic drive technology,choices reasonably hydraulic components and designs drive system of mechanical hand.The experiments show that the capability of catch can be improved up.Its structure is close,stable,impact-jresistance,vibration-jresistance and explosion-proof.
Mechanical hand;Drive system design;Hydraulic drive technology
2016-05-18
陈国君(1958-),男,吉林省吉林市人,东北电力大学机械工程学院高级实验员,主要研究方向:液压与气压技术.
1005-2992(2016)05-0039-04
TH122
A