Modeling of reliability and performance assessment of a dissimilar redundancy actuation system with failure monitoring
2016-11-23WngShopingCuiXioyuShiJinMiletTomovicJioZongxi
Wng Shoping,Cui Xioyu,Shi Jin,Milet M.Tomovic,Jio Zongxi
aSchool of Automation Science and Electrical Engineering,Beihang University,Beijing 100191,China
bCollege of Engineering and Technology,Old Dominion University,Norfolk,VA 23529,USA
Modeling of reliability and performance assessment of a dissimilar redundancy actuation system with failure monitoring
Wang Shaopinga,*,Cui Xiaoyua,Shi Jiana,Mileta M.Tomovicb,Jiao Zongxiaa
aSchool of Automation Science and Electrical Engineering,Beihang University,Beijing 100191,China
bCollege of Engineering and Technology,Old Dominion University,Norfolk,VA 23529,USA
Actuation system is a vital system in an aircraft,providing the force necessary to move flight control surfaces.The system has a significant influence on the overall aircraft performance and its safety.In order to further increase already high reliability and safety,Airbus has implemented a dissimilar redundancy actuation system(DRAS)in its aircraft.The DRAS consists of a hydraulic actuation system(HAS)and an electro-hydrostatic actuation system(EHAS),in which the HAS utilizes a hydraulic source(HS)to move the control surface and the EHAS utilizes an electrical supply(ES)to provide the motion force.This paper focuses on the performance degradation processes and fault monitoring strategies of the DRAS,establishes its reliability model based on the generalized stochastic Petri nets(GSPN),and carries out a reliability assessment considering the fault monitoring coverage rate and the false alarm rate.The results indicate that the proposed reliability model of the DRAS,considering the fault monitoring,can express its fault logical relation and redundancy degradation process and identify potential safety hazards.
1.Introduction
As one of the key subsystems in aircraft,the actuation system is mainly used to transmit and distribute secondary energypower and conduct actuations,accomplishing flight control and operation by fulfilling preset missions.If a failure has occurred in the system,a minor outcome could result in a failed mission,but a disastrous outcome can result in fatal plane crash.Therefore,the performance and reliability of the actuation system are of critical importance to aircraft safety,maneuverability,and flight quality.1,2
Nomenclature
Abbreviation Meaning
DRAS dissimilar redundant actuation system
DMM dynamic Markov model
M motor
EN evidential networks
DFTA dynamic fault tree analysis
MSS multi-state system
FMD fault monitoring devices
FMCR failure monitoring coverage rate
MCR monitoring coverage rate
GSPN generalized stochastic Petri nets
HA hydraulic actuator
HS hydraulic source
HAS hydraulic actuation system including HA and HS
EHA electro-hydraulic actuator
ES electrical supply
EHAS electro-hydraulic actuation system including EHA and ES
DFM direct failure mode
GFM gradual failure mode
CTMC continuous-time Markov chain
GSPNHASdescription for GSPN-based reliability model of HAS
GSPNEHASdescription for GSPN-based reliability model of EHAS
HSupoperational state of HS
HSdnfailed state of HS
HAeupequivalent operational state of HA
HAednequivalent failed state of HA
HASupoperational state of HAS
HASdnfailed state of HAS
ESupoperational state of ES
ESdnfailed state of ES
EHAeupequivalent operational state of EHA
EHAednequivalent failed state of EHA
EHASupoperational state of EHAS
EHASdnfailed state of HAS
EHASbpback-up state of EHAS
GSPNDRASdescription for GSPN-based reliability model of DRAS
DRASupoperational state of DRAS
DRASdnfailed state of DRAS
HAS/EHASudstate that undetected failure existed in HAS/EHAS
HAS/EHASfdstate that failures are detected in HAS/EHAS
HAS/EHASfastate that false alarm occurred in HAS/EHAS
HAS/EHASnfastate that no false alarm occurred in HAS/EHAS
HAS/EHASvupHAS/EHAS is in operational state from the view of detection signal
HAS/EHASvdnHAS/EHAS is in failure state from the view of detection signal
HAlflight failure state of HA
HAmfmiddle failure state of HA
HAsfsecure failure state of HA
Variable Meaning
i input current of HA
u input voltage of EHA
θ deflection angle of the control surface
λ failure rate
μ repair rate
Pmmonitoring coverage probability of FMD
Pfafalse alarm probability of FMD
SHAS/EHAS/DRASmarking vector of GSPN for HAS/EHAS/DRAS
SIDEALstate space of DRAS in an ideal situation with no FMD
MHAS0/EHAS0/DRAS0initial states of S in HAS/EHAS/DRAS
KHAS/EHAS/DRAScapacities of each element in SHAS/EHAS/DRAS
THASt/EHASttimed transition set of GSPN for HAS or EHAS
ΛHAS/EHASTransition rate set associate with THASt/EHASt
THASit/EHASitimmediate transition set of GSPN for HAS or EHAS
T dynamic transition behavior set
M0initial identification of a system in GSPN model
F arc set of GSPN
W arc weight set of GSPN
Sdmarking set to express whether the fault of HAS/EHAS is detected or false alarm occurred
Svmarking set to describe if HAS/EHAS is normal from the view of detection signal
SINTIntegral state space of DRAS with FMD
Peupequivalent operational probability of HA
Pednequivalent failure probability of HA
λeequivalent failure rate of HA
In order to improve the reliability and safety of an actuation system,the dissimilar redundancy technology has been widely adopted in modern aircraft design.3,4Airbus 380 was the first aircraft to introduce a system with a combination of dissimilar hydraulic power/electronic power and hydraulic actuators/electro-hydrostatic actuators aiming to avoid severe outcomes resulting from common cause failures in the actuation system.5Although the dissimilar redundant technology has enhanced system mission reliability,it has also increased the overall complexity due to the multiple redundancy design.Shi et al.6analyzed a triplex-redundancy airborne hydraulic actuation system and found that the number of system states has increased nine times due to the applications of redundancy techniques.In addition to the normal operating and complete failure states,the system is loaded with a great number of performance degrading states.In other words,the redundancy design in the power and actuation system makes an aircraft experience significant redundancy and performance degradation processes.The redundancy degradation affects not only the general performance,but also the general availability of the system because there are very complicated transitions within the redundancy degradation and between normal and fault states.It is concluded from the analysis of redundancy system failure mechanisms that the degradation failure process is closely related to the system architecture,equipment reliability parameters,and redundancy transition strategies.Therefore,in order to gain better understanding of the reliability advantages of the DRAS,it is essential to conduct comprehensive research on all possible system states and transition paths from normal state to complete failure state.
Traditional reliability modeling methods,reliability block diagram(RBD)and fault tree analysis(FTA),construct logic relations between component reliability and system reliability in accordance with the system structural composition and function,but they fail to represent the dynamic redundancy degradation and state transitions of DRAS.In addition,NP-hard problem occurs when we calculate the minimum cut set of a large fault tree,as presented by Nystrom et al.7Yang et al.8applied evidential networks(EN)approach to the problem of the reliability of a redundant servo actuation system.His approach could not describe existing states and dynamic transitioning while the system is working.Distefano9and Ranjbar et al.10presented the analytical method of system dynamic reliability,and employed the dynamic Markov model(DMM)to illustrate states and behavior of the system.The authors approach was based on two-state assumption(normal and failed),which is unable to demonstrate in detail the entire degradation process from full-up state to failure.As the number of system components linearly increase,the system's state space will experience exponential increase,which means that DMM has exponential complexity.11DRAS is a typical multi-state system(MSS)performing its task with degraded performance levels.Levitin12proposed the universal generating function(UGF)method for MSS reliability analysis.A comprehensive review of MSS reliability theory and its applications can be found in the work by Lisnianski and Levitin,13where different approaches for assessing MSS reliability are presented in detail.An extension of Boolean models to the multi-valued case,stochastic process and Monto-Carlo simulation are also highlighted by Liu and Huang.14However,these methods could not describe the performance of FMD,which is necessary in DRAS.Yao3proposed a dynamic fault tree analysis model(DFTA)of an airplane fly-by-wire system.The approach included the dynamic timing of system failures,but did not consider state transition paths of the system redundancy degradation.
Furthermore,to ensure proper functioning of DRAS,FMDs are included in DRAS.FMD monitors the system states in real time,and isolates and cuts out faulty units.Multiple factors,including detection precision,layout of sensors,selection of failure thresholds,and other external interferences,collectively affect the performance of FMD.The performance of FMD is commonly denoted by failure monitoring coverage probability and false alarm probability.In actual application with monitoring coverage rate limits,FMD are unable to 100%correctly detect and isolate DRAS,which may have significant impact on the system safety.In extreme cases,failing to detect a fatal fault(complete failure in a single channel,HAS or EHAS,in DRAS)may cause disastrous consequences.However,when false alarms occur in FMD,it does not necessarily mean that all alarms or transitions are responses to real systemic faults,but rather,perfect or comparatively sound devices may be mistakenly switched off,thus lowering the utilization of the DRAS and affecting the mission reliability of the system.As a result,FMD often becomes the weak link in the entire redundancy system design.15The advantages of GSPN resulted in development of a triplex-redundancy hydraulic actuation system.The related reliability model of three parallel hydraulic actuators revealed how failure detection rates affected system reliability on the basis of the redundancy architecture,according to Shi et al.6However,they did not discuss degradation of actuator performance,nor false alarms from FMD.
The DRAS,in general,experiences performance degrading processes and fault sequences,different redundancy monitoring transition strategies,and potential faults which have significant impact on the system reliability.Thus,there is a need to develop a method to model the reliability of DRAS with fault monitoring.The Markov process10,which is commonly applied for system reliability modeling,requires predefinition for all state transitions when it is used in analyzing performance degradation and fault dynamic sequence,which makes the problem difficult to solve.The problem of using the Markov process approach to DRAS with monitoring devices is even more difficult due to significant complexity of the system.For such a complex system,to pre-define accurately all potential states is virtually impossible and any minor change in the system structure would require significant effort to reconfigure the model.Additional difficulty is presented by the fact that the current reliability model cannot manifest potential safety hazards due to introduction of FMD.Therefore,it is important to propose a new model applicable to the reliability and safety analysis of DRAS.GSPN is a modeling and analysis tool for distributed systems,particularly suited to describe the order,concurrency,conflict,and synchronous relationship of the process or component in a system.Meanwhile,as a special directed network,Petri net can reflect state changes and provide intuitive development of a system by means of a graphic model.16–19
This paper firstly studies the state transitions in the light of the characteristics of DRAS.A reliability model is constructed and solved using GSPN,and then the weak link of the dissimilar redundant system is identified.The detection probability and false alarm probability are considered as FMD is calculated,and the system fault logical relation and redundancy degrading process are presented.Finally,the causes and probability of potential safety hazards are analyzed,and the methods for improvement of system safety are discussed.
2.Reliability modeling for the dissimilar redundancy actuation system
The architecture and block diagram of a DRAS is shown in Fig.1,where the power supply includes hydraulic power(HS)and electric power(ES),and its actuation system is composed of an HA and an EHA.Energy for the HA is supplied by a central hydraulic power unit,whereas the EHA has integrated electric power and local hydraulic units.The system represents a typical dissimilar redundancy architecture in terms of power supply and actuation system.20,21
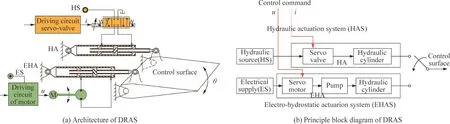
Fig.1 Architecture and principle block diagram of DRAS.
As indicated in Fig.1,the HAS consists of central hydraulic power supply(HS)and a hydraulic actuator(HA)including a servo valve and a hydraulic cylinder.The EHAS consists of electric power(ES)and an electro-hydraulic actuator(EHA)including a piston pump and a hydraulic cylinder.An FMD is set up in each channel to guarantee safe and reliable operation,early fault detection,timely fault isolation,and rapid maintenance of system failures.Normally,the HAS works alone as a primary driver of control surfaces,while the EHAS serves as a backup to the HAS.The hydraulic cylinder of the EHA is in a back-up state with two hydraulic chambers connected.If the HAS breaks down and its failure is correctly detected,the failed HAS will be isolated and cut off,which will cause the EHAS to carry on the mission of actuating control surfaces.If the EHAS is to malfunction,the aircraft will have to substitute it with other control surface combinations to realize the flight control.
2.1.State transition analysis of the dissimilar redundancy system
Deriving from the DRAS working principle and its failure occurrence and development process,we use λHASand λEHASto represent the failure rate for the HAS and the EHAS,respectively,as well as μHASand μEHASas repair rates.Pmand Pfarepresent the monitoring coverage probability and the false alarm probability of FMD.Then the main DRAS states can be defined as indicated in Table 1.
Based on the above state definitions,DRAS state transition relations are illustrated by Fig.2.The figure represents a diagram of state transitions based on the Markov process.It depicts the system redundancy degradation and failure processes.In the DRAS,an FMD is required to detect the working states of HAS and EHAS,whereas in a single HAS or EHAS,an FMD is not required.Here,Pmrepresents the monitoring coverage probability of FMD and Pfarepresents the false alarm probability of FMD.
DRAS states,in Fig.2,are divided into three groups.The first group,represented with solid circles,includes DRAS functional states(1,2,3,11,12,and 13).State 1,represented with two concentric solid circles,means that HAS operates and EHAS is in standby mode normally.States 2,3,11,12,and 13 are DRAS redundancy degradation states and are represented with a single solid circle.The second group of states,represented with dashed line circles,includes DRAS complete failure states(4,5,6,and 7).The third group of states,represented with triangles,includes DRAS potential hazardous states(8,9,and 10).The probability on the edge between two nodes indicates the state transfer probability.As the states are clearly described in Table 1,it is straightforward to understand the parameters,the failure rate λ and the maintenance rate μ of the components(HAS and EHAS),as well as the monitoring coverage probability Pmand the false alarm probability Pfaof FMD in DRAS.
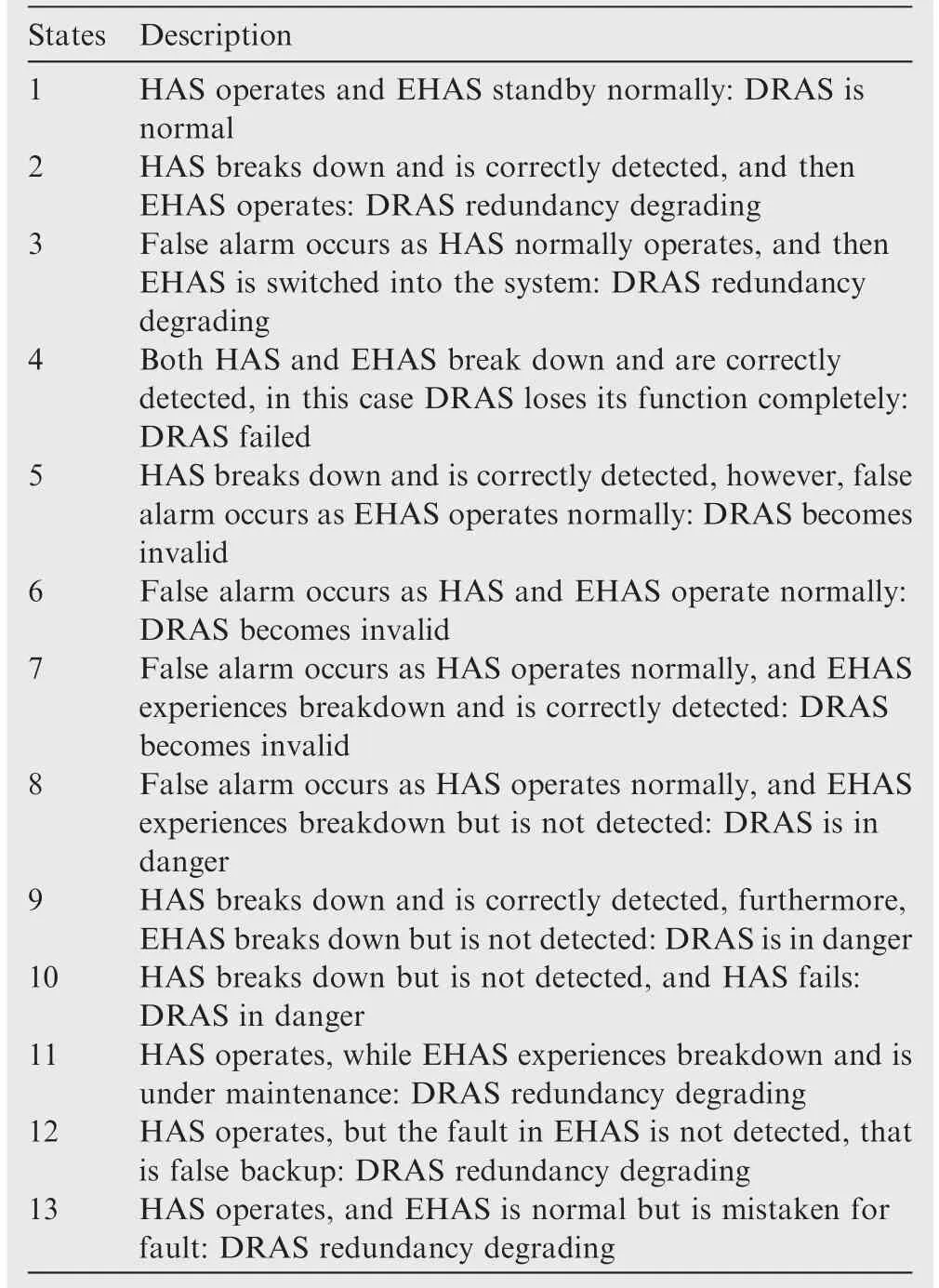
Table 1 System state definition.
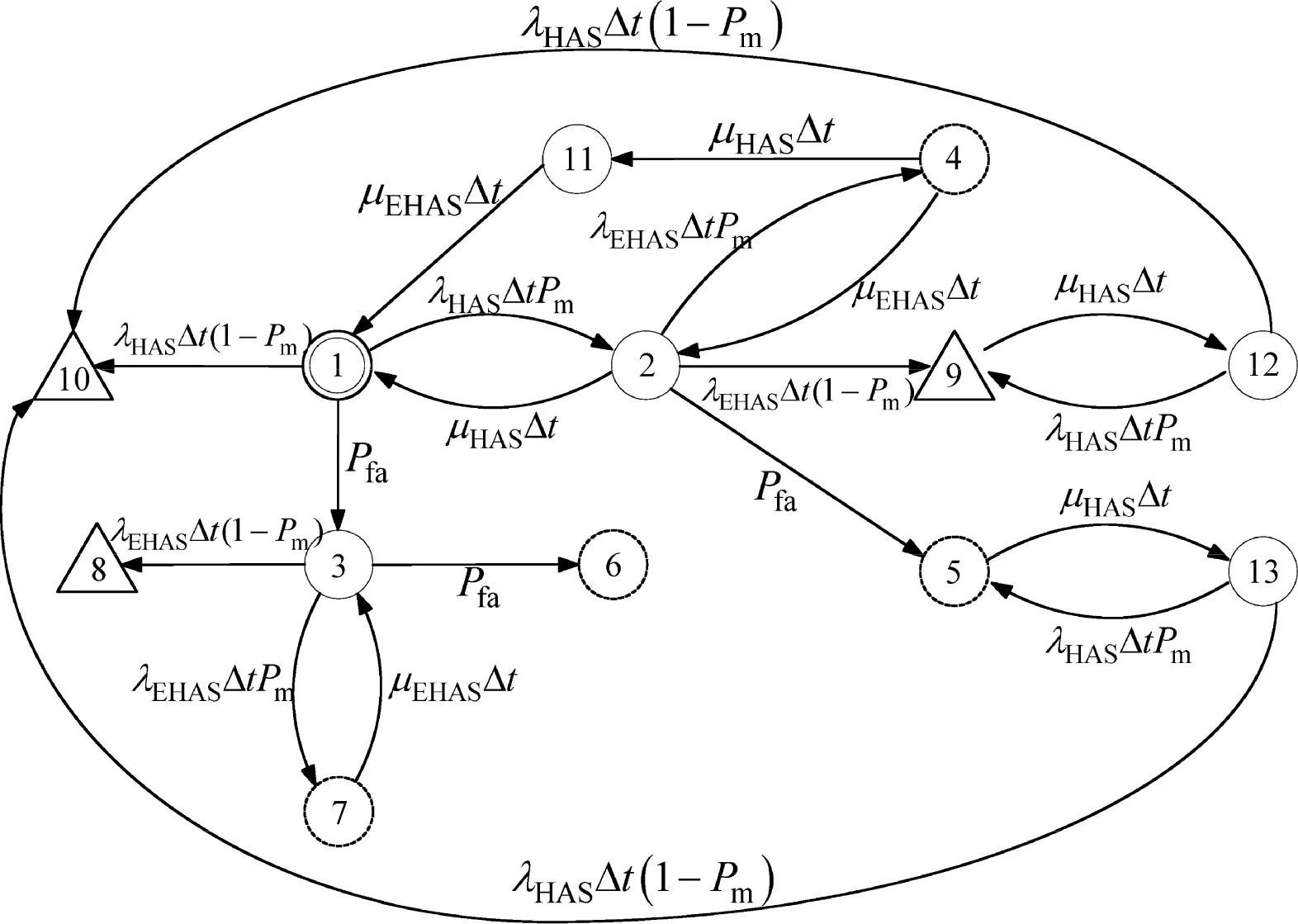
Fig.2 DRAS state transitions based on the Markov process.
If the failure detection threshold value set in FMD is too high,or if FMD is out of order,an actual HAS failure may not be detected correctly.As a result,DRAS will not be able to cut off the failed HAS and switch operation to EHAS.In this case,the control surface driven by DRAS will be out of control,and the aircraft will be in a hazard state.This particular failure of DRAS is described as a transition from state 1 to state 10,as shown in Fig.2.Alternately,if the failure of EHAS is not detected due to FMD's incomplete detection coverage of DRAS in state 3,the control surface driven by DRAS may also be out of control,and the aircraft will be in a hazard state.This failure process of DRAS is described as a transition from state 3 to state 8,as shown in Fig.2.Therefore,missed detection and false alarm of FMD can create potential safety problems to the aircraft,affecting aircraft safety and its reliability.Furthermore,when DRAS is in state 1,HAS may be wrongly cut off and switched to state 3 because of the false alarm of FMD or occasional intermittent interferences.At that instant,if the EHA also reports a false alarm,then the overall system will soon be regarded as in a fault state.Transitions 1-3-7/6 and 1-2-5 show that false alarms can cause DRAS to drop into failure sooner,reduce the system utilization,and have negative effect on mission-accomplishing reliability.Consequently,when establishing a reliability model for DRAS,the FMD performance factor is of vital importance to the accuracy of the model.
The Markov model approach is unable to reveal the working states of internal components in HAS and EHAS.The multiple states and complicated models render the solution of the Markov model even more difficult.Furthermore,both HAS and EHAS are closed-loop control systems,the performance of which may downgrade with an increase in service time.22Therefore,the reliability model of HAS/EHAS cannot be simply described with two states(i.e.,operational and failed).Failure of HAS/EHAS can be divided into two modes:direct failure mode(DFM)and gradual failure mode(GFM).DFM is a failure mode in which a failure once occurs will directly cause failure in HAS and/or EHAS.In the case of HAS,typical DFMs include short-circuiting and disconnect of servo valve coil,seizing of the servo valve spool or hydraulic cylinder,and fatigue failure of the piston rod.Alternately,in the case of EHAS,typical DFMs include motor winding short-circuiting and disconnect,and damage of core insulation.GFM is a progressive failure mode,where the development and occurrence of GFM happen over a period of time.This failure mode includes failures such as leakage caused by the wear of hydraulic cylinders,abrasion of servo valve spools,and parameter fluctuation of various system components.The Markov model which takes into account the failure features of HAS/EHAS becomes unwieldy,thus making finding the solution increasingly difficult,and thus GSPN is introduced.A continuous-time GSPN with finite position and timed transition is isomorphic to a one-dimensional continuous-time Markov chain.23To describe the fault-maintenance process of a complex system,the dynamic operation of an actual system is simulated by marked flow in a reliability model based on GSPN.Meanwhile,as a mathematical tool,GSPN is obtained by establishing state equation,algebraic equation and simulation,which simplifies the reliability modeling and solving process of a complex system.
2.2.GSPN depiction of DRAS
Generalized stochastic Petri nets(GSPN)are generally defined asGSPN=(S,T;F,K,M,Λ),under the condition that S∪T≠Ø, S∩T=Ø, F⊆(SXT)∪(TXS), and dom(F)∪con(F)=S∪T.24S={s1,s2,...,sm}is the set of repository,T={t1,t2,....,tn}is the set of timed transition,and the elements infare called arcs.K={k1,k2,...,kl}is the capacity function set of repository S and W is the weight function which connects the timed transition and the arcs of repository.M0is the initial identification of a system.Λ ={λ1,λ2,...,λm}is the set of the average trigger rate of the timed transition,where the reciprocal of λ is the average time delay of the timed transition.In the reliability analysis,λ is represented for failure/maintenance rate distribution of a component. dom(F)={x|∃y:(x,y)∈ F} and con(F)={x|∃y:(y,x)∈ F}are the domains of definition and range,respectively.
2.2.1.Assumptions
Assumption 1:Both the failing and repairing times of each component in DRAS can be represented by the exponential distribution.
Assumption 2:HAS is the main actuation system to drive the rudder,while EHAS is the backup system.Once HAS fails,EHAS replaces HAS and drives the control surface.HAS will take over once it is repaired.
Assumption 3:FMD is used to detect failures in both HAS and EHAS.The isolation and switching of redundancy configuration are executed once FMD detects the faults.FMD is assumed to have limited fault monitoring coverage and false alarming probability in DRAS.
2.2.2.Definitions
Definition 1:The GSPN-based reliability models of HAS and EHAS are described as:

Definition 2:The GSPN-based model of the DRAS in an ideal situation without FMD is described as:

Definition 3:The integrated GSPN model of the DRAS with FMD is described as:

where GSPNFMDis:

2.2.3.Model description
In order to effectively describe the operational/failed status of components and subsystems,we define SHAS={HSup,HSdn,HAeup,HAedn,HASup,HASdn} as the marking vector of GSPNHAS.The elements in SHASdescribe the operational and failed states of HS,the equal functional and equal failed states of HA,and the operational and failed states of HAS.The initial states of SHASare defined as MHAS0={1,0,1,0,1,0}which indicates that HAS and its components are all operational.Here,#(HSup)=1 indicates that the hydraulic source is normal,and#(HSdn)=1 indicates that a fault has occurred in the HS.The detailed description of each element in SHASis provided in Section 2.2.4.KHAS={1,1,1,1,1,1}defines the capacity of each element in SHAS.THASt={tHAS1,tHAS2,tHAS3,tHAS4}is the timed transition set of GSPNHAS,and defines all dynamic failing/repair processes of each component in HAS.The transition rate set associated with THAStis ΛHAS={λHS,μHS,λHA,μHA}.The elements in ΛHASrepresent for the failure rate of HS,the repair rate of HS,the failure rate of HA,and the repair rate of HA, respectively. The immediate transition set THASit={tHASi1,tHASi2,tHASi3} is defined in GSPNHASto describe logical judgment processes,which take less time than the timed transitions.The dynamic transition behavior can then be described as THAS=THASt∪THASit, and THASt∩THASit=Ø.FHASis the arc set of the model,and the values of the arc set WHASare all 1.
The purpose of the EHAS is to serve as a back-up system to the HAS.It has three operating states–normal,failure,and back-up. We define SEHAS={ESup,ESdn,EHAeup,EHAedn,EHASup,EHASdn,EHASbp}as the marking vector of EHAS.The elements in SEHASdescribe the operational and failed states of ES,the equal functional and equal failed states of EHA,and the operational,failed,and back-up states of EHAS.KEHAS={1,1,1,1,1,1,1}is the capacity set of the elements in SEHAS.Depending on the states transition processes in EHAS,we define the time dependent transition set of EHAS as TEHASt={tEHAS1,tEHAS2,tEHAS3,tEHAS4},and the transition rate set associated with TEHAStas ΛEHAS={λES,μES,λEHA,μEHA}.The elements in ΛEHASrepresent the failure rate of ES,the repair rate of ES,the failure rate of EHA,and the repair rate of EHA,respectively.The immediate transition set is de fined asand it represents the logical judgment between markings in EHAS.Here,TEHAS=TEHASt∪TEHASitand TEHASt∩TEHASit=Ø.FEHASis the arc set and the values of the arc set WEHASare all1.The logical relation ship between HAS and EHAS of DRAS is active-standby.GSPNDRASis used to describe the DRAS model,and the marking vector SDRAS={DRASup,DRASdn}represents the operational and failed states of DRAS.SIDEAL=SDRAS∪SHAS∪SEHASdescribes the state space of DRAS in an ideal situation with no FMD.The initial state of the system is MDRAS0={1,0},and the capacity vector of each marking is KDRAS={1,1}.
For the purpose of performance analysis of FMD,the marking set Sd={HASud,HASfd,EHASud,EHASfd,HASnfa,HASfa,EHASnfa,EHASfa}is used to express whether a fault of HAS and/or EHAS is detected or isolated and whether a false alarm has occurred. The marking set Sv={HAS.vup,EHAS.vup}is defined to describe if HAS/EHAS has a normal detection signal.SINT=SHAS∪SEHAS∪SDRAS∪Sd∪Svrepresents the integral state space of DRAS with FMD

Fig.3 GSPN model of HA performance degradation process.
2.2.4.GSPN model of DRAS
(1)GSPN model analysis of HAS
According to the fault behavior analysis of HA and EHA described in Section 2.1,HA is a position closed-loop control system where fault behaviors include both direct failure process and progressive failure process caused by the performance degradation of components.The resulting HA's GSPN model,based on performance degradation,is shown in Fig.3.
According to the GSPN model,in Fig.3,HA can function normally in the initial condition,i.e.,#(HAup)=1.After a period of time tHA1,HA may encounter DFM with a probability of P(tHAi4),and then a token is transmitted directly from HAupto HAdn.The failure that HA may encounter could also be a GFM with a probability of P(tHAi1),and then HA is considered to be in the lightfailure state (HAlf).Here,P(tHAi4)+P(tHAi1)=1.The transfer rate of the timed transition tHA1is λ1,and then P(tHAi4)λ1describes the failure rate of HA from a normal operating state to complete failure,while P(tHAi1)λ1describes the failure rate of HA from a normal operating state to a light failure state.As the operational time is increasing,HA may encounter further performance degradation until down(HAdn),or after a light failure state(HAlf),a middle failure state(HAmf)token is directly transmitted to HAdnwith a probability of P(tHAi5)or P(tHAi6).Here,P(tHAi5)+P(tHAi2)=1 and P(tHAi6)+P(tHAi3)=1.temp i(i=1,2,3)represent temporary states in GSPN modeling of the HA performance degradation process.The failed HA will be repaired after transition tHA5where the transfer rate is μ.
It can be seen from Fig.3 that the GSPN model of the HA performance degradation process has five steady states:working normally,the light failure state,the middle failure state,the serious failure state,and complete failure.If we use numbers 0,1,2,3,and 4 to represent the five states,then the continuoustime Markov chain(CTMC)model of HA,which is equivalent to the GSPN model,can be represented as shown in Fig.4.
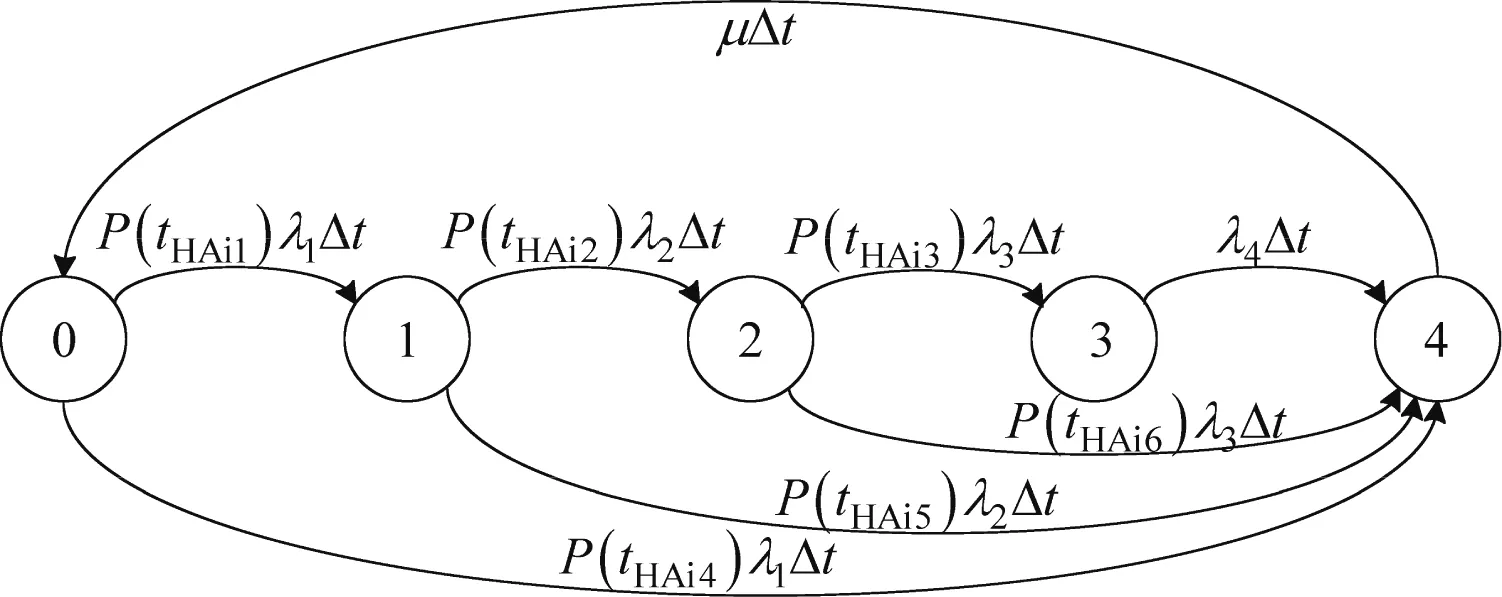
Fig.4 CTMC model of HA performance degradation process.
The probability of state transfer is shown on the edge between two nodes in Fig.4.P(tHAit)represents the probability of an immediate timed transition,λirepresents the failure rate of different degraded HA,and μ represents the maintenance rate from a complete failure state to a functional state.
According to the CTMC model shown in Fig.4,the state transition equation is obtained as:
According to the GSPN structure in Fig.5,the equivalent operational probability of HA is:

where μe= μ.Accordingly,the equivalent failure rate of HA is:


The initial condition is:
The steady probabilities of these states of HA can be obtained as follows:

The HA can still fulfill its function in the all four states 0,1,2,and 3,so the equivalent operational probability of HA(Peup)and the equivalent failure probability of HA(Pedn)are:

In order to facilitate the reliability analysis,the failure and repair process can be equivalent to a transition between an operational state and a failure state.The simplified GSPN model is shown in Fig.5.

The parameters of the HA model,the values of failure rate λi(i=1,2,3,4),and the maintenance rate μ,according to Li et al.25are provided in Table 2.The probability of HA's immediate timed transition is assumed based on experience.The value of λecan then be calculated from Eqs.(9)-(11)as

Combined with the failure process of HS,the dynamic GSPN model of the HAS can be established as shown in Fig.6.
As indicated in Fig.6,the hydraulic actuator(HA)and the hydraulic power supply(HS)can operate normally in the initial condition,#(HAeup)=1,#(HSup)=1,and#(HASup)=1.When the timed transition tHAS1is triggered,the operating state of HS is changed from a normal working state to a failure state,and the triggering rate depends on the failure rate λHS.Transition tHAS2simulates the restoration process of HS,and its triggering rate depends on the maintenance rate μHS.The HA's state transition principle is similar to that of the HS,and the transition rates of tHAS3and tHAS4are λHAand μHA.HASupdescribes the operational state of HAS,and iff#(HSup)=1∩#(HAeup)=1,then #(HASup)=1,which means that HAS can work normally when both HS and HA are working well.HAS.dn represents the fault occurring in HAS,and iff#(HSdn)=1∪#(HAedn)=1,then#(HASdn)=1,which means that failure of either HA or HS can lead to HAS failure.

Table 2 Parameters of the HA model.

Fig.5 Simplified GSPN model of HA.
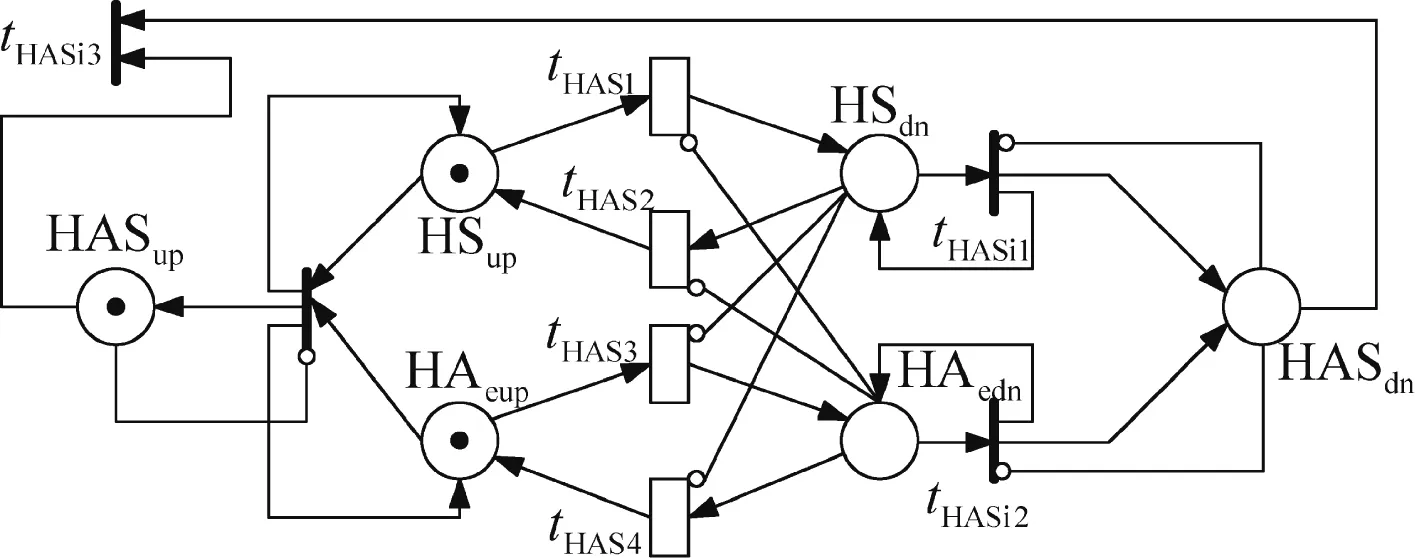
Fig.6 GSPN model of HAS.

Table 3 GSPN model states of HAS.
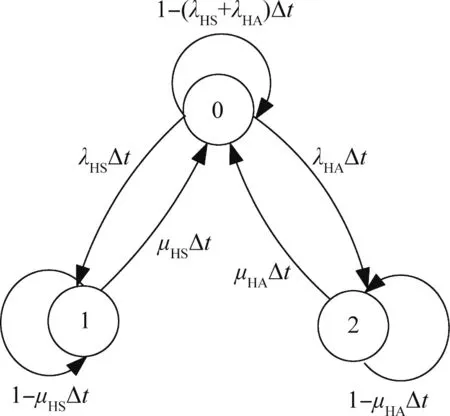
Fig.7 CTMC model of HAS.
Analysis of the reachable markings in Fig.6 indicates that three reachable states of HAS can be obtained as shown in Table 3.
According to the states description of HAS in Table 3,the CTMC model equivalent to HAS's GSPN model is shown in Fig.7.In Fig.7,states 0,1,and 2 of HAS are described as in Table 3.The probability of state transferring is shown on the edge between two states.The sum of probability of one state transferring to another state or remaining in its state is 1.In Fig.7,λ represents the failure rate and μ stands for the maintenance rate.
Based on the CTMC model of the HAS,the state transition equation is obtained as:

where Pi(t)is the probability of state i.
The initial condition is:

The result for HAS's reliability can be obtained accordingly.The steady state availability of HAS is:

Given the transition rate values in Eq. (15),λHS=2X10-4/h, λHA= λe=1.7X10-4/h, μHS=7.2X 10-4/h,and μHA= μe=6.8X10-4/h.25The steady state availability is determined to be 0.6545.
The EHAS serves as the back-up system for HAS.If EHAS malfunctions and is subsequently repaired,the state of EHAS will be transferred from the fault state to the back-up state.That is,there will be three states for EHAS in the DRAS model:working,fault,and back-up.The GSPN model which describes the dynamic failure process of EHAS is similar to the HAS model,and will be shown in DRAS modeling.
(2)GSPN reliability model for the ideal DRAS without FMD
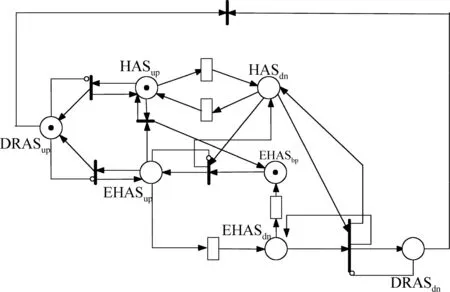
Fig.8 GSPN model for working mechanism of DRAS.
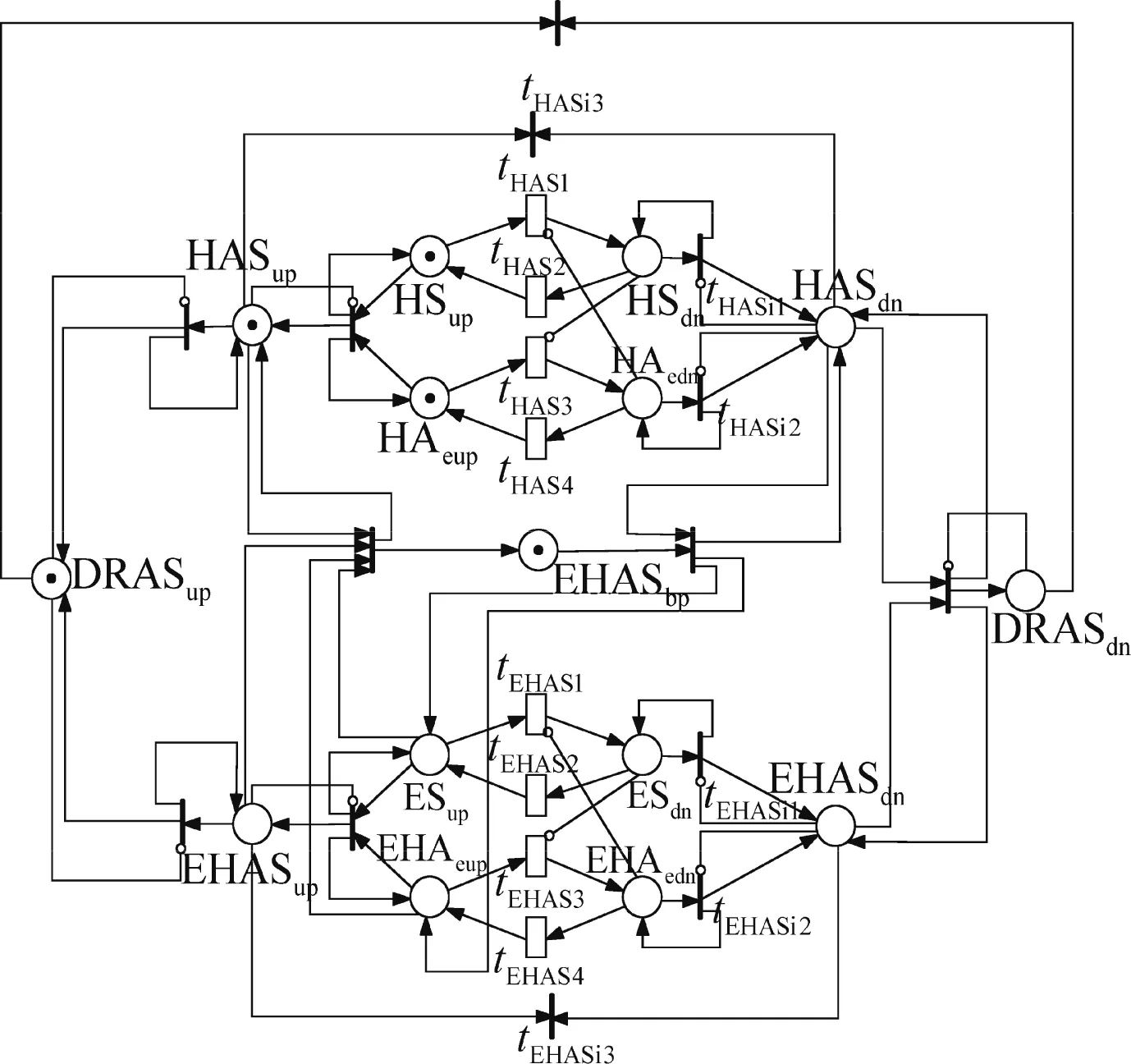
Fig.9 GSPN model for DRAS without FMD.

Table 4 GSPN model parameters of EHAS.25

Table 5 Accessible states and steady-state probability of the ideal DRAS reliability model.
The working mechanism of DRAS is cold backup.In the beginning,HAS is working,and EHAS is in the back-up mode,and DRAS is functioning well,thus:#(HASup)=1,#(DRASup)=1,and#(EHASbp)=1.IfHASfailsand EHAS is in the normal backup state,EHAS resumes the function of the failed HAS to drive the rudder.In this case,EHASbpis marked with a token,and DRAS is still functioning.If EHAS also fails,DRAS loses it function completely,expressed asiff#(HASdn)=1∩#(EHASdn)=1,and #(DRASdn)=1.When EHAS is repaired,it returns to the back-up state,and EHASbpregains the token.The working mechanism logic of DRAS can be demonstrated by GSPN shown in Fig.8.
To correctly clarify the relations between component failure,subsystem failure,and overall DRAS failure,we can set up a reliability model for an ideal condition with no failure monitoring devices,as shown in Fig.9.
Since the model is very complex compared to the GSPN model of HAS,computer simulation is adopted to solve the problem.Model parameters for EHAS are given in Table 4.When we operate the model in Fig.9 and 86 states can be accessed,9 of which have effective tokens,as shown in Table 5.
In Table 5,M0indicates that all components in both HAS and EHAS are in proper service.States M1and M3represent a failure in HAS due to an HS or HA fault,but all components in EHAS work well,so DRAS runs normally.States M2,M4,M6,and M7indicate that some have failed in both the HAS and EHAS,thus leading to overall system failure.States M5and M8indicate that HAS is in service,while EHAS is in the repair state due to ES or EHA failure,and the system is still operating.
It can be concluded from the above description that states M0,M1,M3,M5,and M8denote the normal operating state of DRAS,so availability of the system is described as:

In comparison with the availability of a single HAS in Section 2.2.4(1),the adoption of the dissimilar redundancy working mode(EHAS)can highly improve the availability of the DRAS.
(3)Comprehensive GSPN model taking FMD's monitoring coverage probability and false alarm probability into account in DRAS
In the ideal model in Fig.9,when HAS fails and EHAS is in the back-up state,the system will immediately switch to EHAS to drive the control surface;if the EHAS also breaks down,and the fault in HAS is not fixed,the DRAS will be considered to be in the failure status.In an actual DRAS,the HAS channel requires a fault monitoring device to check whether failure occurs and then makes transition when failure is detected.In the same way,EHAS also needs to be equipped with a monitoring device to detect and determine whether the system fails and then takes possible remedial actions.Affected by factors related to the system complexity and FMD reliability,the devices have certain indicators such as monitoring coverage probability and false alarm probability.If failure cannot be accurately detected,then potential failure and hazard states may result.Therefore,to better describe actual situations,a GSPN dynamic reliability model considering FMD performance is developed and presented in this paper.The system is shown in Fig.10.
In the model in Fig.10,instantaneous transitions tHASi5,tEHASi5,tHASi4,and tEHASi4,containing probability,represent the failure monitoring coverage probability and the fault missed detection probability ofFMD,and P(tHASi4)+P(tHASi5)=1,P(tEHASi4)+P(tEHASi5)=1.The states#(HASfd)and#(EHASfd)indicate that failures are successfully detected,and the states#(HASud)and#(EHASud)represent undetected/false failures.Instant transitions tHASi7and tEHASi7indicate that FMD has reported false alarms,while tHASi6and tEHASi6indicate that FMD can correctly identify DRAS working states, and P(tHASi6)+P(tHASi7)=1,P(tEHASi6)+P(tEHASi7)=1.The states#(HASfa)and#(EHASfa)indicate existences of false alarms in the system,and the state#(HASnfa)and#(EHASnfa)indicate that token false alarms have not occurred.The states#(HASvup)and#(EHASvup)stand for HAS/EHAS running well from the view of the signal.

Fig.10 Comprehensive GSPN model of an actual DRAS considering FMD performance.
Various system states can be seen from the GSPN model of an actual DRAS considering FMD performance
.When HAS fails,i.e.,#(HASdn)=1,the failure can be detected by FMD with a probability of P(tHASi5),and then#(HASfd)=1,#(HASvdn)=1;therefore,DRAS switches to EHAS.
.Alternately,if the failure is not detected with a probability of P(tHASi4),then#(HASud)=1,#(HASvup)=1,and DRAS mistakenly regards HAS as functioning normally,without switching,so the DRAS is in danger.
.When HAS fails,i.e.,#(HASdn)=1∩#(HASfd)=1∩#(HASvdn)=1∩#(EHASbp)=1,then EHAS is activated.As time passes by,if EHAS fails,that is,#(EHASdn)=1,the failure is detected at a probability of PEHASi5,and then#(EHASfd)=1,#(EHASvdn)=1,and#(DRASdn)=1,so the control surface driven by this DRAS is invalidated,and the flight control system will take measures for isolation and remediation.
.Alternately,if the EHAS failure is not detected at a probability of PEHASi4,then#(EHASud)=1 and#(EHASvup)=1,so the DRAS is running at risk.
.During EHAS failure,if HAS is fixed,then DRAS switches back to HAS.When false alarms have not occurred in HAS,#(HASnfa)=1,#(HASvup)=1,and#(DRASup)=1.
.If a false alarm occurs in HAS,then#(HASfa)=1,#(HASvdn)=1,and#(DRASdn)=1,so DRAS identifies a failure by wrong determination, thus reducing availability.
.Similarly,when false alarms happen while EHAS is running,then#(EHASvdn)=1 and#(DRASdn)=1.
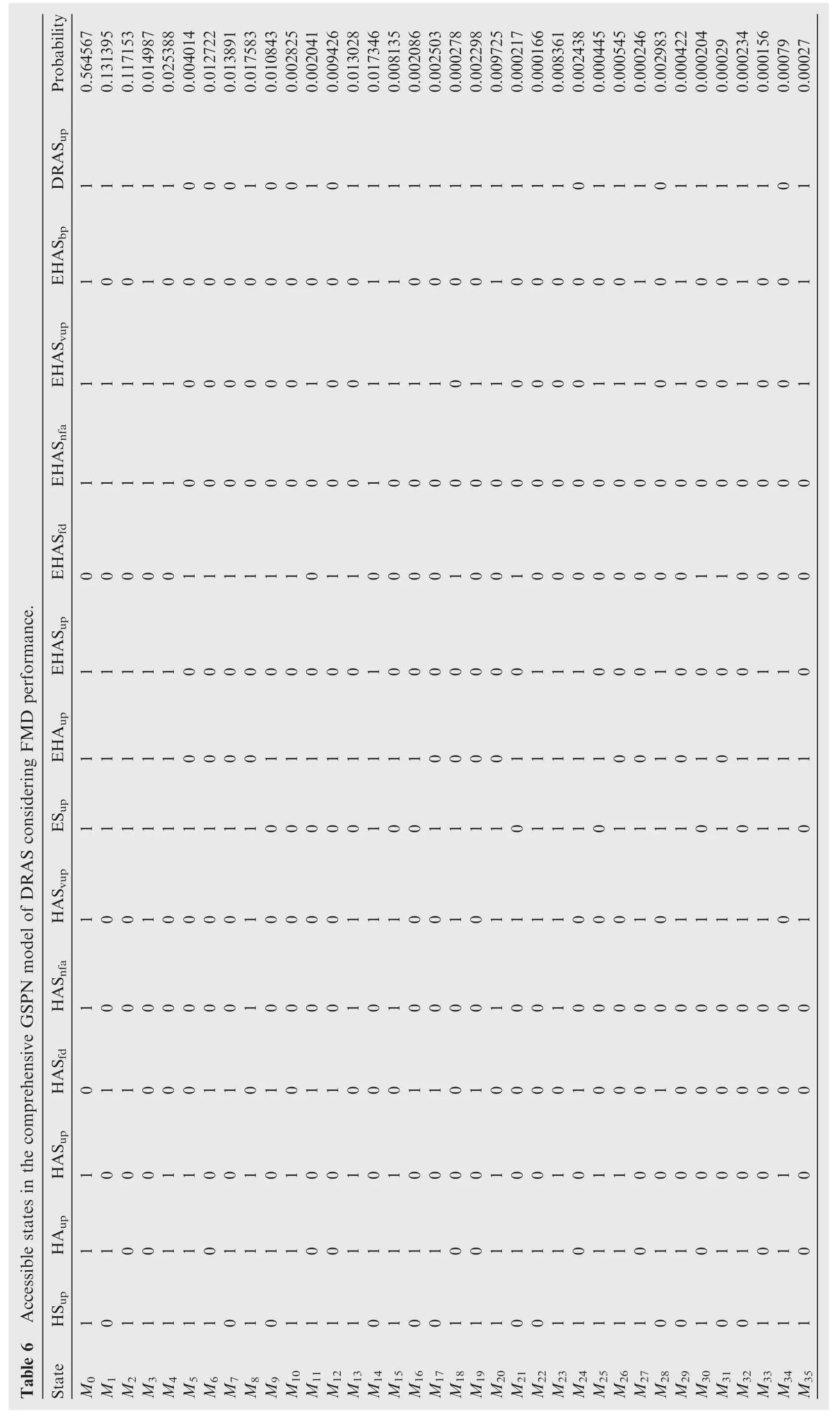
Assuming that the monitoring coverage probabilities of FMD in HAS and EHAS are P(tHASi5)=P(tEHASi5)=0.9 and that the fault alarm probabilities of FMD in HAS and EHAS are P(tHASi7)=P(tEHASi7)=0.05,we have 496 accessible tokens,36 of which have valid states,as shown in Table 6.
Analysis of DRAS accessible states provided in Table 6 reveals the following:
.State M0indicates that HAS is in the normal service and is correctly detected,EHAS is in the proper backup standby mode,and DRAS is functioning well,which is the desired/ideal system state.
.States M8and M13indicate that HAS is in the normal service and is correctly detected,but EHAS fails,with failure being detected and repaired(ES or EHA failure respectively),and at this moment,DRAS is functioning,but with degraded redundancy.
?
.State M23indicates that HAS is working properly and is correctly detected,and EHAS is in normal service,but false alarms lead to judgment that DRAS is unavailable,hence DRAS is in redundancy degradation.
.States M15and M20indicate that HAS is in normal service and correct detection,and EHAS is in the back-up status,but a fault actually exists in EHAS,without being detected by FMD,so it is in invalid backup,and DRAS is in redundancy degradation.
.States M1and M2indicate that HAS fails and is identified by FMD(HA or HS failure respectively),and then the system enters EHAS,functioning well,so by the time system redundancy is downgraded.
.State M4indicates that HAS is working well but makes false alarm and gets isolation,and then the system switches to EHAS,in degraded redundancy.
To combine the above six scenarios and nine states,the functioning probability(PA)of DRAS can be worked out,which represents the DRAS availability.

Further analysis of DRAS accessible states provided in Table 6 reveals the following:
.States M6,M7,M9,and M12indicate that HAS is in malfunction and is detected,and DRAS transits to EHAS,which is in failure and is detected,so DRAS is in the normal failure state.
.States M24and M28indicate that HAS is in malfunction and is detected,and DRAS switches to EHAS when it is working properly but reports false alarms,so DRAS is in the normal failure state.
.States M5and M10indicate that HAS is functioning well but its false alarm makes it blocked,and DRAS activates EHAS that fails and is detected,so DRAS breaks down..State M34indicates that HAS is normal but it reports false alarms and gets isolated,so DRAS selects EHAS which functions well but reports false alarm,so DRAS fails.
In all of the above-mentioned four scenarios and nine states,DRAS cannot operate normally,and gives alarms.Therefore,the system failure probability,also known as unavailability(PUA),can be determined as follows

Further analysis of DRAS accessible states provided in Table 6 reveals the following:
.States M25and M26indicate that HAS is in good condition but it alarms falsely and is isolated,EHAS is selected but faults occur in EHAS(due to separate failures of ES and EHA)and are not detected,and the detection system is under impression that DRAS is functioning well,but in fact it is in the hazard state.

Table 7 Comparison of three system availability based on the GSPN model.
.States M11,M16,M17,and M19indicate that HAS has faults(HS and HA failures respectively)which are detected and blocked,EHAS transfers to a working state,which is in a failure state(ES and EHA failures respectively)and is undetected,and the monitoring system is under impression that DRAS is in a good working condition,but it is actually in the hazard state.
.States M3,M14,M18,M21,M22,M27,M29,M30-33,M35reflect that HAS is in problem but is not spotted by FMD,so the DRAS is in the hazard state.
To summarize,the incidence rate of hazard states(PD)is:

The above results are consistent with the analysis in Section 2.1.A comparison provided in Table 7 indicates that the introduction of FMD may leave the system in danger.In addition,the system reliability with FMD's monitoring coverage probability and false alarm probability taken into account is lower than that in an ideal situation(without FMD).The analytical results correspond to system behaviors observed in practice.6
3.Analysis of impact of FMD performance on DRAS reliability and safety
According to the reliability analysis models,the reliability outcome is often higher than the actual value because there is no consideration of impact of FMD performance on system reliability.However,if the performance of FMD is too poor,it will cause potential danger to the system by drastically lowering the system reliability.Hence,the effects of FMD performance on system reliability need to be studied.
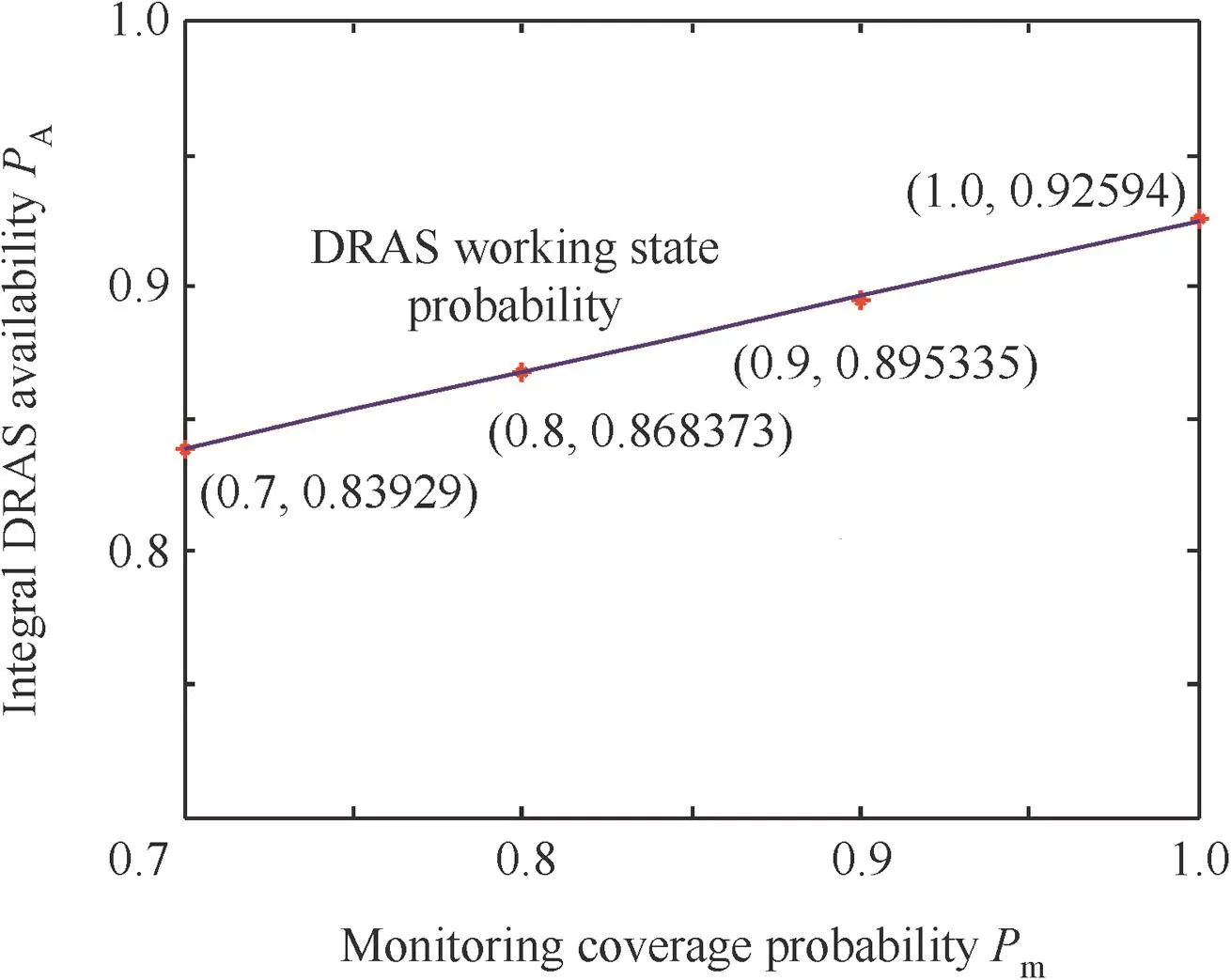
Fig.11 Relationship between the working state probability and the monitoring coverage probability.
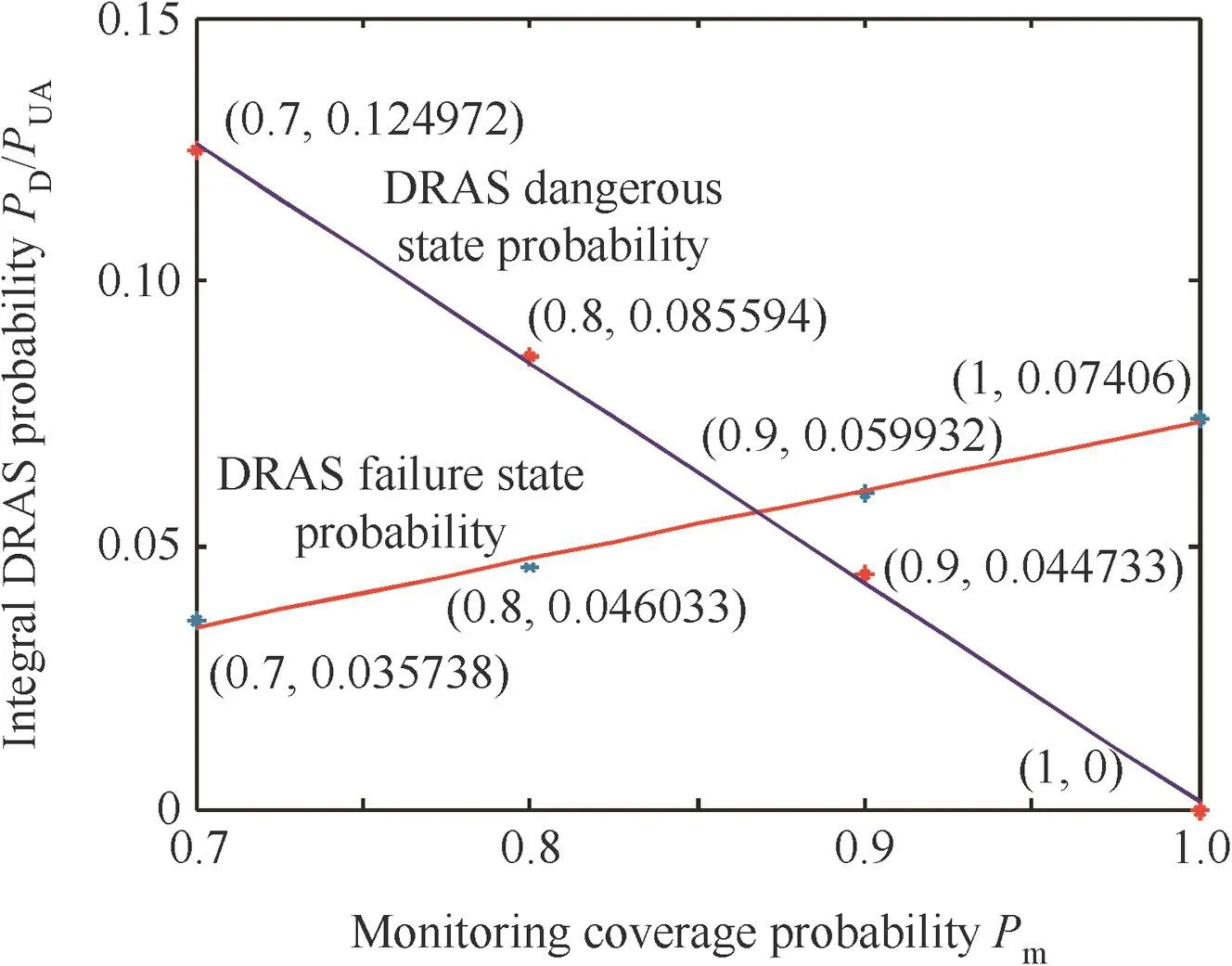
Fig.12 Relationship between the dangerous state probability,the failure state probability,and the monitoring coverage probability.
3.1.Impact analysis of FMD's monitoring coverage probability on DRAS
Assuming that the false alarm probability is P(tHASi7)=P(tEHASi7)=0.05,and by simulating the model shown in Fig.10,we can determine how the probabilities of the working,hazard,and failure states of the EHAS change with the monitoring coverage probability,as shown in Figs.11 and 12.
Ata given false alarm probability ofP(tHASi7)=P(tEHASi7)=0.05,we use the least squares method to fit the numerical data,Fig.11,and the resulting relationship is given by PA=0.2869Pm+0.6384,where Pmis monitoring coverage probability and PAis avail ability of integral DRAS.We can conclude that by improving the monitoring cove rage probability by 1%,the availability of DRAS would increase by 0.29%.
In addition,we have applied the least squares method to fit the numerical data in Fig.12,and the relationship between the dangerous state probability(PD)in DRAS and the monitoring coverage probability(Pm)is PD=-0.4158Pm+0.4172,while the relationship between the failure state probability(PUA)in DRAS and the monitoring coverage probability is PUA=0.1289Pm-0.0556.We can conclude that by improving the monitoring coverage probability by 1%,the probability of DRAS's dangerous state would decrease by 0.42%,while the unavailability would increase by 0.13%.
From Figs.11 and 12,it can be observed that as the monitoring coverage probability increases,potential faults in the system can be gradually identified and isolated,and the system reliability can be improved.At the same time,since the faults are easier to identify,the possibility of danger from missed detection is substantially reduced,and the failure rate increases.
3.2.Impact analysis of FMD's false alarm probability on DRAS
Assuming that the monitoring coverage probability is P(tHASi5)=P(tEHASi5)=0.9,we can determine how the probabilities of the working,dangerous,and failure states of DRAS change with the false alarm probability,as shown in Figs.13 and 14.
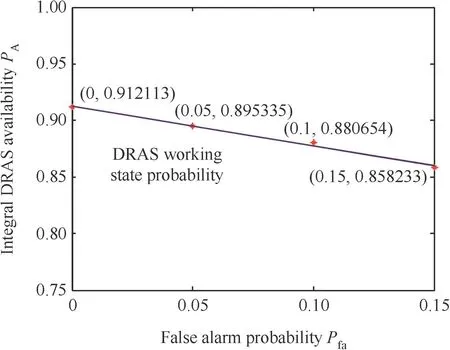
Fig.13 Relationship between the working state probability and the false alarm probability.

Fig.14 Relationship between the dangerous state probability,the failure state probability,and the false alarm probability.
Assuming that the monitor coverage probability is P(tHASi5)=P(tEHASi5)=0.9,we can apply the least squares method to fit the numerical data in Fig.13.The function in Fig.13 is PA=-0.3526Pfa+0.9130.Pfais the false alarm probability and PAis the availability of integral DRAS.We can observe that 1%degradation of the false alarm probability increases the availability of DRAS by 0.35%.
From Fig.14,the relationship between the failure state probability(PUA)of DRAS and the false alarm probability(Pfa)can be described as PUA=0.3290Pfa+0.0436,and the relationship between the dangerous state probability(PD)and the false alarm probability is PD=0.0239Pfa+0.0434.We can observe that 1%degradation in the false alarm probability decreases the unreliability of DRAS by 0.33%and the probability of a dangerous state of DRAS would decrease by 0.02%.
It is observed from Figs.13 and 14 that as the false alarm probability is increasing,the misjudgment rate in the working state increases,hence the components cannot be fully used within a life span,so the reliability drops and the failure rate increases.Alternately,the probability of states M25and M26will increase as the false alarm probability increases,thus further leading to a rising possibility of the hazard state.
4.Conclusions
This paper has established a reliability model with GSPN based on the analysis of DRAS architecture and its characteristics.
The paper has presented a study of different system states and transition relations,and discussed the impacts of the monitoring coverage rate and the false alarm rate of failure monitoring devices on system reliability.The major findings are as follows:
(1)The explicit performance degrading processes and fault sequences as well as different redundancy monitoring transition strategies and potential faults have significant effects on DRAS.Reliability modeling for DRAS based on GSPN can clearly describe the dynamic redundancy degradation and state transitions process.
(2)The dissimilar redundant working mode can greatly improve the availability of a large aircraft actuation system compared to a single HAS.In a dissimilar redundancy actuation system,HS/ES and HA/EHA make DRAS experience significant redundancy and performance degradation processes between normal and fault states.The dissimilar system architecture and redundancy transition strategies give better understanding of the reliability advantages of DRAS.
(3)Due to the limitations of FMD in DRAS,there are circumstances when system failure cannot be accurately detected or a well-functioning system is reported with false alarms.If a fault is not detected,the system will be in a potentially hazardous situation.In the DRAS reliability model,as presented,an increase of the monitoring coverage rate and a reduction of the false alarm rate would reduce the probability for the system entering a dangerous state.
Based on the above analysis,it can be concluded that focusing only on redundancy when designing a redundant system is not sufficient and more attention should be paid to improving the failure monitoring devices and designing improved failure monitoring plans.However,this means an increase in the cost of design,so in system design,all comprehensive factors should be taken into account and reasonable design parameters should be selected.
Therefore,when designing a redundancy system,caution should be taken when designing and testing FMD performance.The GSPN model set up in this paper can serve as an accurate reliability assessment for an airplane DRAS,and can also be readily applied in reliability modeling and analysis for other electromechanical systems.
Acknowledgments
This study was supported by the National Basic Research and Development Program of China(No.2014CB046402),the National Natural Science Foundation of China (No.51175014),and''111quot;Program of China.
1.Yang J,Huang HZ,Sun R.Reliability analysis of aircraft servoactuation systems using evidential networks.Int J Turbo Jet-Engines 2012;29(2):59–68.
2.Wang SP,Tomovic MM,Shi J.Integrated reliability metrics to assess fault tolerant control system.Proceedings of the IEEE international conference on systems,man and cybernetics;2007 Oct 7–10;Montreal,Canada.Piscataway,NJ:IEEE Press;2007.p.1310–5.
3.Yao YP,Yang XJ,Li PQ.Dynamic fault tree analysis for digital lf y-by-wire flight control system.15th AIAA/IEEE digital avionics systems conference;1996 Oct 27–31.Piscataway,NJ:IEEE Press;1996.p.479–84.
4.Zhu XF.Guarantee and implementation of reliability of the hydraulic systems. Ordnance Ind Autom 2008;27(5):74–6 Chinese.
5.Goupil P.AIRBUS state of the art and practices on FDI and FTC in flight control system.Control Eng Pract 2011;19(6):524–39.
6.Shi J,Wang SP,Wang K.GSPN-based reliability model of the aircraft hydraulic actuator system.Acta Aeronaut Astronaut Sin 2011;32(5):920–33 Chinese.
7.Nystrom B,Austrin L,Ankarback N,Nilsson E.Fault tree analysis of an aircraft electric power supply system to electrical actuators.PMAPS 2006.International conference on probabilistic methods applied to power systems;2006 Jun.11–15;Stockholm,Sweden.Piscataway,NJ:IEEE Press;2006.p.1–7.
8.Yang JP,Wen D,Huang HZ,Sun R,Wan H,Sun R.Reliability analysis of aircraft servo-actuation systems based on the evidential networks with imprecise information.International conference on quality,reliability,risk,maintenance,and safety engineering;2011 Jun 17-19;Xi'an,China.Piscataway,NJ:IEEE Press;2011.p.187–94.
9.Distefano S,Xing LD.A new approach to modeling the system reliability:dynamic reliability block diagrams.2006 Reliability and maintainability symposium;2006 Jan 23-26;Newport Beach,USA.Piscataway,NJ:IEEE Press;2006.p.189–95.
10.Ranjbar AH,Kiani M,Fahimi B.Dynamic Markov model for reliability evaluation of power electronic systems.2011 International conference on power engineering,energy and electrical drives;2011 May 11–13;Malaga,Spain.Piscataway,NJ:IEEE Press;2011.p.1–6.
11.Kim K,Park KS.Phased-mission system reliability under Markov environment.IEEE Trans Reliab 1994;43(2):301–9.
12.Levitin G.The universal generating function approach for the analysis of multi-state systems with dependent elements.Reliab Eng Syst Saf 2004;84(3):285–92.
13.Lisnianski A,Levitin G.Multi-state system reliability:assessment,optimization and application.Singapore:World Scientific Publishing Co Pte Ltd;2003.p.283–49.
14.Liu Y,Huang HZ.Reliability and performance assessment for fuzzy multi-state elements.Proc Inst Mech Eng Part O:J Risk Reliab 2008;222(4):675–86.
15.Shi J,Meng YX,Wang SP,Bian MM,Yan DG.Reliability and safety analysis of redundant vehicle management computer system.Chin J Aeronaut 2013;26(5):1290–302.
16.Liu TS,Chiou SB.The application of Petri nets to failure analysis.Reliab Eng Syst Saf 1997;57(2):129–42.
17.Shi J,Wang SP,Shang YX.Petri-nets based availability model of fault-tolerant server system.2008 IEEE conference on robotics,automation and mechatronics;2008 Sep 21-24;Chengdu,China.Piscataway,NJ:IEEE Press;2008.p.444–9.
18.Volovoi V.Modeling of system reliability Petri nets with aging tokens.Reliab Eng Syst Saf 2004;84(2):149–61.
19.Kanoun K,Ortalo-Borrel M.Fault-tolerant system dependability explicit modeling of hardware and software component interactions.IEEE Trans Reliab 2000;49(4):363–76.
20.Tao JF,Wang SP,Jiao ZX.Reliability analysis with performance for triple redundant actuator.J Syst Simul 2004;16(1):38–41.
21.Wang SP,Cui MS,Shi J.Performance degradation and reliability analysis for redundant actuation system.Chin J Aeronaut 2005;18(4):359–65.
22.Carneiro JS,Ferrarini L.Reliability analysis of power system based on generalized stochastic Petri nets.Proceedings of the 10th international conference on probabilistic methods applied to power systems;2008 May 25–29;Rincon,USA.Piscataway,NJ:IEEE Press;2008.p.1–6.
23.DeLong T,Smith DT,Johnson BW.Dependability metrics to assess safety-criticalsystems.IEEE Trans Reliab 2005;54(3):498–505.
24.Su C,Shen G.Development for system reliability modeling and simulation based on generalized stochastic Petri net(GSPN).MIE China 2007;36(9):45–8[Chinese].
25.Li Q,Wang SP,Shi J,Wang SJ,Jiao ZX.Reliability modeling analysis for hydraulic/electro-hydrostatic dual redundant actuation system.2014 IEEE Chinese conference on guidance,navigation and control(CGNCC);2014 Aug 8–10;Yantai,China.Piscataway,NJ:IEEE Press;2014.p.2757–62.
Wang Shaopingreceived her B.S.,M.S.,and PhD degrees in mechatronic engineering from Beihang University in 1988,1991,and 1994,respectively.She is a''Cheung Kongquot;Chaired Professor in the School of Automation Science and Electrical Engineering at Beihang University.Her main research interests are mechatronics,control,reliability,and fault diagnosis.
11 May 2015;revised 17 July 2015;accepted 7 August 2015
Available online 20 October 2015
Dissimilar redundancy actuation system;
Electro-hydraulic actuation system;
Fault monitoring;
Generalized stochastic Petri nets;
Performance degradation
Ⓒ2015 The Authors.Production and hosting by Elsevier Ltd.on behalf of Chinese Society of Aeronautics and Astronautics.This is an open access article under the CC BY-NC-ND license(http://creativecommons.org/licenses/by-nc-nd/4.0/).
*Corresponding author.Tel.:+86 10 82338933.
E-mail address:shaopingwang@vip.sina.com(S.Wang).
Peer review under responsibility of Editorial Committee of CJA.
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- Optimization on cooperative feed strategy for radial–axial ring rolling process of Inco718 alloy by RSM and FEM
- Measuring reliability under epistemic uncertainty:Review on non-probabilistic reliability metrics
- Optimum blade loading for a powered rotor in descent
- Experimental study of ice accretion effects on aerodynamic performance of an NACA 23012 airfoil
- Parachute dynamics and perturbation analysis of precision airdrop system
- Simulative technology for auxiliary fuel tank separation in a wind tunnel