步进梁负载扰动自适应获取与前馈控制
2016-11-22鲁照权钱晓阳
鲁照权 钱晓阳
(合肥工业大学电气与自动化工程学院,合肥 230009)
步进梁负载扰动自适应获取与前馈控制
鲁照权 钱晓阳
(合肥工业大学电气与自动化工程学院,合肥 230009)
步进式加热炉的步进梁在炉内加热过程中的运动速度既要保证生产节奏,又要实现钢坯的轻托轻放。由于运动部分的惯性太大,加上负载的阶跃式突变,实现速度和位移的精准控制难度很大。为了实时准确地获取钢坯的重量信息并实现前馈补偿控制,提出在移动梁上升过程中,从系统的速度与增益自适应模型的输出偏差中提取负载扰动信息并实现前馈补偿控制的方法,解决了负载阶跃变化导致的速度跌落问题,大幅改善了移动梁上升过程的动态性能,提高了速度控制的准确性。
速度控制 步进梁 模型增益自适应 负载扰动 前馈补偿控制
步进梁是步进式加热炉的核心设备,由固定梁和移动梁组成。钢坯的移动是通过移动梁和固定梁的相对运动来实现的。移动梁做上升、前进、下降和后退动作,将钢坯在炉内加热的过程中一步一步向前运送。移动梁的自重近两百吨,满载时一百多根钢坯的重量有三百多吨。移动梁系统采用双轮斜轨式机构,由液压驱动。在等高线以下运动时移动梁不承载,只有自重;在超过等高线时托起钢坯,负载出现阶跃式突变。步进梁的运动速度既要保证生产节奏,又要保证对钢坯的轻托轻放,以免产生冲击损坏移动梁和固定梁。但是,由于运动部分的惯性太大,加上负载的阶跃式突变,实现速度和位移的精准控制难度很大,是目前工程上比较突出的难题。
对于可测不可控的负载扰动,前馈补偿控制是最有效的解决方法。但是,在工程上钢坯的重量是随机的、不可测的。为了实时准确地获取钢坯的重量信息,实现前馈补偿控制,将移动梁的上升过程分为等高线以下和等高线以上两个阶段。在移动梁的每一个运动周期中,等高线以下进行模型增益自适应,使得模型的输出逼近移动梁的实际运行速度,以消除模型输出的偏差;在等高线之上时,由于移动梁托起了钢坯,造成负载的阶跃式增加,使得原来已经消除的模型输出偏差徒然增加,其增加量恰好与负载阶跃变化的幅值相关。从该偏差中提取阶跃负载信息进行前馈补偿,即可解决由于负载阶跃变化而导致的速度跌落问题,从而大幅改善系统的动态性能,提高位移与速度控制的准确性。在移动梁上升、前进、下降、后退4个动作过程中,上升过程受负载扰动的影响最大,控制难度最大。因此,笔者主要研究移动梁上升过程的前馈补偿控制方法。
1 步进梁简介①
步进梁的结构如图1所示,移动梁的运动速度位移曲线如图2所示。

图1 步进梁结构示意图

图2 步进梁速度位移示意图
2 步进梁系统数学模型
步进梁系统在上升、下降驱动油缸和前进、后退驱动油缸的作用下,实现移动梁的上升、下降、前进、后退动作[1]。为了减轻上升、下降驱动油缸的负载,移动梁采用双轮斜轨式步进机构,如图3所示。
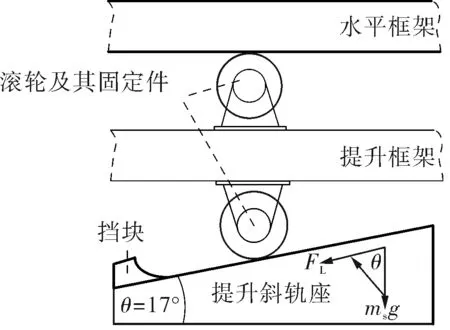
图3 斜轨式步进机构示意图
移动梁位移ys与液压缸活塞位移y的关系如下:
ys=yη
(1)
液压缸的负载FL和钢坯与步进梁运动部分总重量的关系如下:
FL=msg=(m0+m1)gη
(2)
其中,η=ysinθ,θ为斜轨的斜坡角度;ms为框架和钢坯的质量;m0为框架的质量,m1为钢坯的质量。
电液比例方向阀的阀芯位移Xv(s)与控制信号U(s)之间的传递函数为[2]:
(3)
其中,Ksv、Tsv分别为电液比例方向阀的增益和时间常数。
活塞杆外伸时,活塞位移Y(s)的计算式[3,4]为:

(4)

n=A2/A1
式中A1——无杆腔的有效面积,m2;
A2——有杆腔的有效面积,m2;
Ci——液压缸内泄漏系数,m3/(s·Pa);
Kc——流量-压力系数;
Kq——流量增益;
M——活塞和负载总质量,kg;
ps——油源压力,MPa;
V1——液压缸进油腔的容积,m3;
Xv——电液比例阀阀芯位移,m;
βe——油液的有效体积弹性模量,包括油液、混入油液中的空气、连接管道和缸体机械柔度的影响,N/m2。
则活塞位移Y(s)与阀芯位移Xv(s)之间的传递函数为:

(5)
活塞位移Y(s)与负载FL(s)之间的传递函数为:
(6)
活塞位移Y(s)与油源压力ps(s)之间的传递函数为:

(7)
3 控制策略
为了获取负载扰动信息,实现前馈补偿控制,提出如图4所示的移动梁速度闭环控制系统结构[5,6]。在原控制系统结构的基础上增加了系统速度与模型输出比较器、步进梁系统广义增益自适应模型、自适应机构、控制开关及前馈控制等环节。
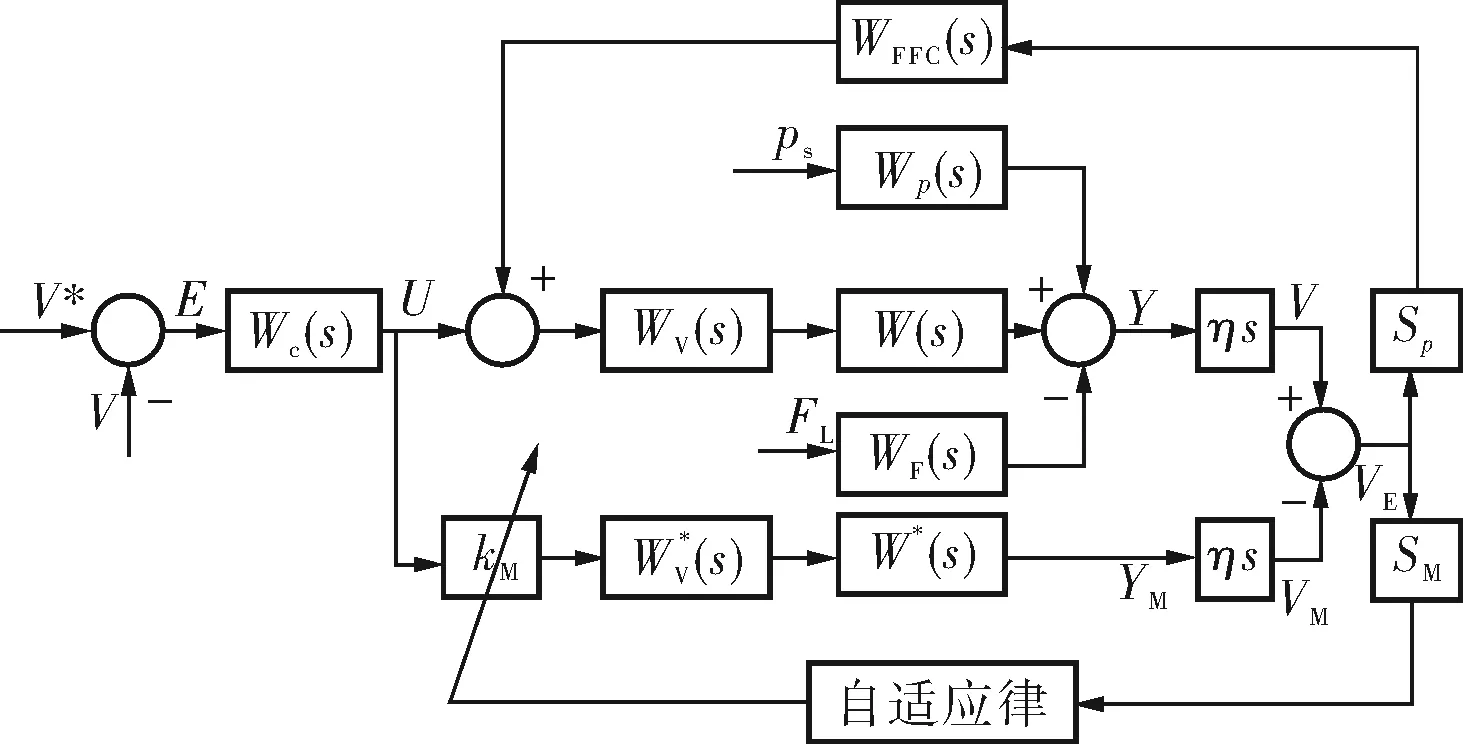
图4 移动梁速度闭环控制系统结构框图

(8)
其中,FL0为移动梁自重产生的作用力,基本为常数;FL1为钢坯重量产生的作用力,其值是随机的。由于生产钢坯品种和入炉钢坯数量的不同,因此FL1的值也是不同的。将模型输出与系统速度的偏差VE描述为:
(9)
控制开关为:
(10)
当0s≤t<7s时,Sp=0、SM=1,自适应机构工作使VE0→0;当7s≤t≤14s时,Sp=1、SM=0,这段时间自适应机构停止工作,但输出保持不变,即模型增益kM保持不变。同时,由于移动梁托起钢坯,导致系统实际速度跌落,VE突然变大,前馈控制器WFFC(s)工作,以实现系统的扰动补偿。
4 增益自适应律
为了便于获得增益自适应律,假设图4的ps和FL均为零,且模型能够完全描述步进梁系统。则由图4中的比较器可获得模型输出与系统速度的偏差VE为:

(11)

(12)
k=1-kM
将式(3)、(5)代入式(12),得:
(13)


从而可得广义误差微分方程为:
(14)
则可得:
(15)
构造李雅普诺夫函数[7~9]:
(16)
其中,P=PT>0,为PA+ATP=-Q的解(Q=QT>0)。
对V求导可得:

(17)

(18)

(19)
式(19)所表示的自适应律,除了包含vE之外,还包含其一阶、二阶导数,难以实现。为此,使PC=hξ,ξ>0,h=[1,0,0]T则自适应律只与vE有关,而与其一阶、二阶导数无关[10~12]。即:
(20)
其中,β=ξ/(λk*),得到自适应律kM为:

(21)
5 前馈控制器
假设系统是线性的,满足叠加原理。为了实现负载扰动的完全补偿,由图4知,必须使得[13,14]:
FL1WF(s)ηs+VE1WFFC(s)Wv(s)W(s)ηs=0
(22)

VE1=ηsWF(s)FL1
(23)
则有:

(24)
将式(3)、(5)代入式(24)可得:

(25)
6 系统仿真分析
6.1系统相关参数及其计算
某加热炉参数为:Kq=1.23m2/s,Kc=6×10-10m5/(N·s),A1=0.0616m2,Ci=6.3×10-11m3/(s·Pa),A2=0.0301m2,βe=1.3×109N/m2,ps=18MPa,Vt1=1.96×10-2m3,θ=17°,M=1.31×105kg,Ksv=1×10-3m/V,Tsv=0.06s。将加热炉数据代入相应的数学模型可得:






6.2仿真和分析
为了验证系统的控制效果,采用MATLAB/Simulink进行仿真[15]。设移动梁自重200t,图5为等高线以下时模型的增益自适应仿真曲线。可见,随着增益的自适应,模型输出与钢坯上升速度之间的偏差经过1s多时间后基本趋于零。

图5 模型增益自适应过程系统响应曲线
图6、7分别为钢坯重量为125、250t时的反馈控制系统响应曲线。可见,在移动梁托起钢坯后,移动梁的运动速度产生很大跌落,且钢坯重量越大跌落越严重。
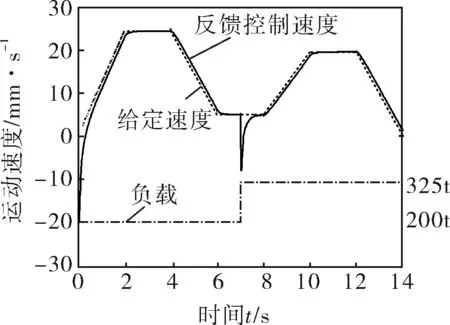
图6 反馈控制系统响应曲线(m1=125t)
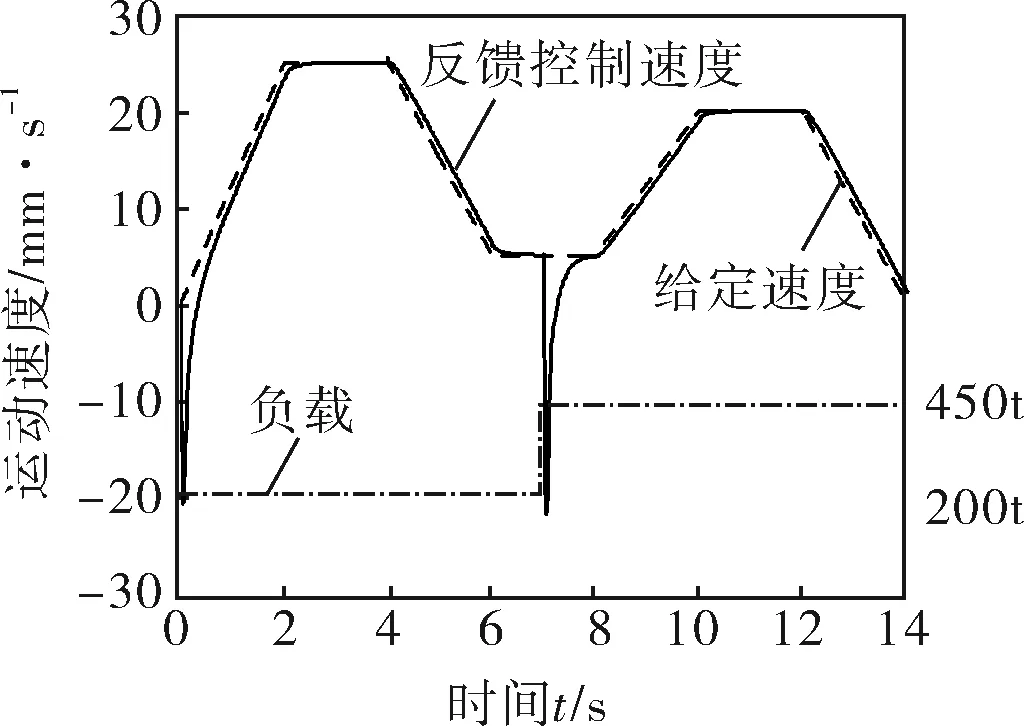
图7 反馈控制系统响应曲线(m1=250t)
图8、9分别为前馈反馈复合控制系统的响应曲线。可见,加入前馈控制后,在移动梁托起钢坯时,移动梁的运动速度几乎没有跌落。
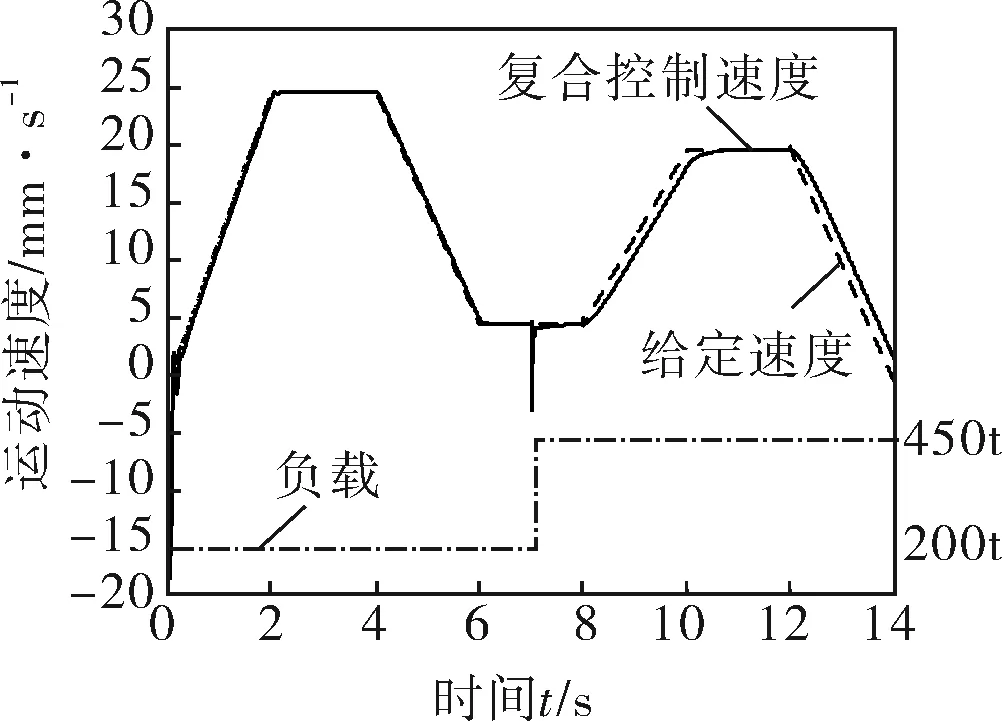
图9 前馈反馈复合控制系统响应曲线(m1=250t)
7 结束语
在加热炉步进梁系统引入增益自适应模型,基于等高线以下模型的输出偏差,由自适应律调整模型增益,实现模型输出对移动梁运动速度的跟踪,使得系统具有很高的鲁棒性,能够消除系统长期运行中诸多因素造成的模型偏差对扰动信号准确性的影响。通过移动梁运动速度与自适应模型输出的比较,获得了钢坯重量信息,实现了负载扰动的前馈控制,保证了系统速度和位移的准确控制。步进梁负载扰动自适应获取与前馈控制方法简单易行,具有很高的应用价值。
[1] 鲁照权,邹扬举,任才横,等.步进炉钢坯测量与定位控制系统[J].电子测量技术,2012,35(10):36~40.
[2] 邹扬举.步进式加热炉电液控制系统分析与建模[D].合肥:合肥工业大学,2013.
[3] Guo R,Zhao J.Research of Electro-Hydraulic Control System Design and Energy Saving Characteristic in the New Drawbead Test Bed[J].Fluid Power and Mechatronics(FPM),2011,26(3):301~305.
[4] 常钰,冯永保.电液比例阀控缸速度控制系统的建模与仿真[J].液压气动与密封,2011,31(8):23~27.
[5] 谭永红.未测干扰过程的前馈控制[J].信息与控制,1990,19(4):56~59.
[6] 巨军让,金以慧.不可测扰动的自适应预测控制[J].新疆石油天然气,1990,2(1):112~114.
[7] 高军礼,邓则名,李芳.可调增益的模型参考自适应控制及其仿真[J].信阳师范学院学报(自然科学版),2001,14(3):341~343.
[8] 鲁照权,任才横,何娟,等.基于自适应解耦的加热炉燃烧系统控制[J].化工自动化及仪表,2013,40(7):827~830.
[9] 曹海洋,李新宇.基于模型参考自适应的矿井提升机液压制动控制系统[J].煤矿机械,2009,30(4):112~114.
[10] 谢新民,丁锋.自适应控制系统[M].北京:清华大学出版社,2002:38~40.
[11] 徐南荣,程明熙.自适应控制[M].北京:国防工业出版社,1980:128~130.
[12] 邢晓熙,戴宁生.直流调速系统模型参考自适应控制器设计[J].中国制造业信息化,2007,36(8):49~50.
[13] 胡寿松.自动控制原理[M].北京:科学出版社,2007:276~277.
[14] Peng X W,Wang Y,Wang X Z.Self-Adjusting Feedforward Compensation Tracking Control for Proportional Valve-Controlled Motor[J].Journal of Beijing Institute of Technology,1999,8(3):282~287.
[15] Dong J B,Ren S J.Research of Synchronization Control System Based on Electro-hydraulic Proportional Valve[J].Computer Application and System Modeling,2010,(10):377~380.
WalkingBeamLoadDisturbanceAdaptiveAcquisitionandFeedforwardControl
LU Zhao-quan, QIAN Xiao-yang
(SchoolofElectricalEngineeringandAutomation,HefeiUniversityofTechnology,Hefei230009,China)
Walking beam’s speed in the furnace should ensure production rhythm and the transport of steel billet gently and safely. The large inertial motion of the moving parts and step-type mutation load make precise control of both velocity and displacement very difficult. In order to accurately obtain the billet’s weight information, achieve feedforward compensation control, a method that in the process of moving beam’s rise, extracting the information of load disturbance from the output deviation of the system’s speed and the gain adaptive model to achieve feedforward compensation control was proposed to solve the fall of the speed incurred by changes in the load step, and greatly improve dynamic performance of the moving beam’s rise process as well as improve the precision of speed control.
speed control, walking beam, model gain adaptive, load disturbance, feedforward compensation control
TH862
B
1000-3932(2016)12-1257-05
2016-08-31(修改稿)
国家自然科学基金项目——分布参数切换系统控制理论及其应用研究(60974022);合肥工业大学企业委托项目——山东临沂步进式加热炉工程项目自动控制系统(105-432683/11-037)
