可连续转弯的6-RSPS驾驶模拟器平台机构设计
2016-11-21黎建军杨春杰尹念东
黎建军,杨春杰,尹念东,何 彬
(1中国计量大学 机电工程学院,浙江 杭州 310018;2湖北理工学院 机电工程学院,湖北 黄石 435003)
可连续转弯的6-RSPS驾驶模拟器平台机构设计
黎建军1,杨春杰2*,尹念东2,何 彬2
(1中国计量大学 机电工程学院,浙江 杭州 310018;2湖北理工学院 机电工程学院,湖北 黄石 435003)
针对经典的Stewart模拟驾驶器平台机构不能模拟车辆大角度转弯的缺陷,设计了一种可连续转弯的6-RSPS驾驶模拟器平台机构,并对工作空间进行了仿真。该平台可以围绕Z轴无限旋转,有效地提高了X、Y、Z3个方向上的行程, 增加了驾驶模拟器平台的工作空间,从而有效地提高了模拟的真实性。
驾驶模拟器;6-RSPS;连续转弯;机构设计;工作空间
0 引言
驾驶模拟器是模拟驾驶体验的机械装置,尽可能地模拟在真实驾驶中的感觉(如车辆的振动、上下坡、转弯等),以训练操作者对真实设备的操纵能力以及研发相关模拟设备。驾驶模拟器在飞机、车辆及船舶等驾驶员高级培训中的应用越来越普遍。
先进的驾驶模拟器一般由高仿真的驾驶舱和6个自由度运动模拟平台等组成。驾驶舱内布置的方向盘、油门、刹车、挡位等与被模拟的对象在布局和功能上几乎一致,操作人员通过对其操作来控制运动模拟平台的运动,使人有身临其境之感[1]。6个自由度运动模拟平台都是基于经典的Stewart结构,Stewart平台模拟器如图1所示,可以实现平台在X、Y、Z3个方向的移动与转动。
这种6个自由度运动模拟平台工作存在行程短、各方向转向角度小等问题,其最大的缺点就是围绕Z轴旋转的角度非常有限,旋转极限位置如图2所示,大大降低了模拟转弯时驾驶员的真实感受。同时,由于模拟器平台的运动行程有限,不可能完全再现真实设备的运动轨迹(如长距离上下坡、90°直角转弯等),因此为了能产生连续的真实感,在完成一次运动后,必须采用洗出(Washout)滤波算法使得模拟器平台缓慢地返回到中位,以确保下一步运动模拟具有足够的行程[2]。在车辆驾驶中,由于车辆自身的限制,道路的俯仰和侧倾一般不超过30°,因此模拟器模拟基本能符合实际情况;然而车辆在转弯时有可能是90°直角转弯,也有可能是180°掉头,模拟器偏航(即绕Z轴转动)角度则远远小于实际需求。如果模拟器平台能有更大的偏航角度,则对洗出(Washout)滤波算法降低了要求,并且更能符合模拟驾驶的感受[3]。如韩国的Yun等人研究无人驾驶车辆时应用的可实现3个方向移动与转动的驾驶模拟器[4];德国航空中心研制出一种允许90°倾斜角的Robocoaster机构[5];CVG公司用于研究轻型皮卡车在路面测试中的高精度耐久性试验模拟器[6];台湾的Wu等人用来模拟全地形车(ATV)的被动悬挂的动力学特性6个自由度平台[7]等。


1 6-RSPS驾驶模拟器平台机构设计及工作流程
1.1 机构设计
针对各种洗出滤波算法不能消除真实感受与驾驶模拟器的运动感觉之间的差异,特别是不能围绕Z轴方向连续旋转的缺点,本设计提供了可连续转弯的6-RSPS驾驶模拟器平台。
6-RSPS驾驶模拟器平台机构示意图如图3所示,6-RSPS驾驶模拟器平台装配图如图4所示,平台包括静平台基础、动平台、支撑静平台基础及动平台的6套结构完全相同的支腿结构。支腿结构包括液压缸及上、下底座。静平台基础上端依次同轴固定有蜗轮和环形导轨,移动部件的滑块下端与环形导轨滑动连接,移动部件的上端与液压缸下底座连接,支腿结构的液压缸上底座均匀分布在动平台上。


移动部件结构图如图5所示,移动部件沿着蜗杆中心的剖视图如图6所示。移动部件的滑块位于环形导轨上,主要依靠滑块承受动平台上传下来的垂向作用力,并在环形导轨上滑动。
滑块的上端与滑块固定板连接,固定板分别垂直安装在滑块固定板沿着环形导轨切线方向的两侧,伺服电机通过减速器安装在第1固定板上,减速器的输出轴与蜗杆连接并与蜗轮啮合,滑块固定板下侧的4个角上分别安装滑轮,2个滑轮的凹槽与环形导轨外侧面的凸边相贴合,另外2个滑轮的凹槽与环形导轨内侧面的凸边相贴合,因此滑轮也可以承受动平台上传下来的侧向作用力。安装于静平台基础内控制箱的控制线分别与6个伺服电机连接,并且控制箱能跟随动平台围绕Z轴转动。
水平放置的控制箱固定板通过滑块与具有环形导轨的旋转基础台连接,控制箱安装在固定板上,其下侧的中心与电机连接。当传感器检测到动平台旋转的角度,驱动器驱动控制箱的电机转动相同的角度,因此动平台旋转多少圈,控制箱也旋转多少圈,连接在伺服电机上的控制线不会缠绕在一起。只要电源线足够长,就可以无限地转动。
控制箱内装有控制器、驱动器等,控制伺服电机的旋转角度,配合液压缸的伸缩,达到控制动平台位置与姿态的目的;控制箱与外部的通讯依靠无线通讯,以解决通讯数据线因控制箱的不断旋转而缠绕的问题。


注: 1-静平台基础; 2-移动部件; 3-液压缸下底座; 4-液压缸;5-液压缸上底座; 6-动平台; 7-控制箱; 8-第一固定板;9-蜗杆; 10-蜗轮; 11-环形导轨;12-滑块13-滑块固定板; 14-滑轮; 15-伺服电机;16-减速器;17-第二固定板; 18-模拟器座舱; 19-控制箱固定板; 20-旋转基础台。
1.2 工作流程
计算机检测到模拟器所处的位置、姿态,通过位姿反解得到各个液压缸伸长的长度或伺服电机旋转的角度或者是两者的组合;此时,如果伺服电机不旋转,只有液压缸伸缩,就是相当于一个Stewart平台;如果液压缸不运动,只有伺服电机旋转,也可实现平台6个自由度的运动,但工作空间就小了很多;如果既要液压缸伸缩,又要伺服电机旋转,同时还得满足平台6个自由度运动的需求,那么位姿反解得到的解会更多[8],因此,可以根据不同的情况选择不同的解,即液压缸伸缩多少,伺服电机旋转多少有更多的选择。
当模拟器需要转弯时,将真实设备需要转弯的半径计算转变为模拟器座舱及动平台在静平台基础旋转的角度,因此,每个移动部件围绕相同的方向旋转的角度相同,即伺服电机的旋转量相同;此时,液压缸仍然保持不断的伸缩状态,保证转弯时模拟的上下坡即俯仰、路面侧倾与真实设备类似。
由于在此运动过程中动平台发生了旋转,传感器检测到旋转,驱动器立即驱动电机转动相同的角度,保证控制箱与动平台围绕Z轴旋转的角度相同;由于固定伺服电机的移动部件与动平台之间是通过液压缸连接,因此它们之间的最远距离就是液压缸最大伸长量,而控制箱与动平台保持了相同的角度,因此控制箱与移动部件上的伺服电机的最远距离也可确定,即伺服电机的控制线的长度,不管整个平台怎么运动,此长度都可以保证伺服电机的控制线连接在控制箱上。
当模拟器座舱在动平台上的位置与姿态处于不同的状态时,只需液压缸伸缩至相应的长度或各个移动部件旋转至不同的角度,或者其运动组合即可实现;由于单独伸缩液压缸或者旋转伺服电机都可以实现平台6个自由度的运动,因此如果将两者结合起来,平台的运动空间起到了累加的效果,就会比传统的Stewart平台的工作空间更大。
2 6-RSPS驾驶模拟器平台工作空间
由于6-RSPS驾驶模拟器平台可绕Z轴连续回转,因此只要在YOZ或XOZ平面内搜索位姿边界,将其旋转一周即可得到整个工作空间,其工作空间搜索流程如图7所示。

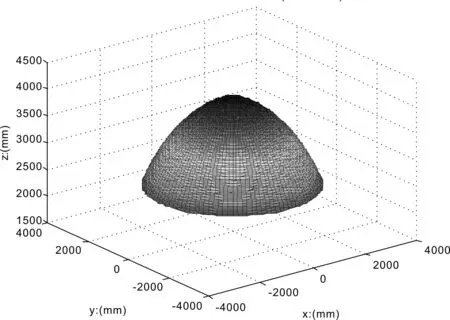
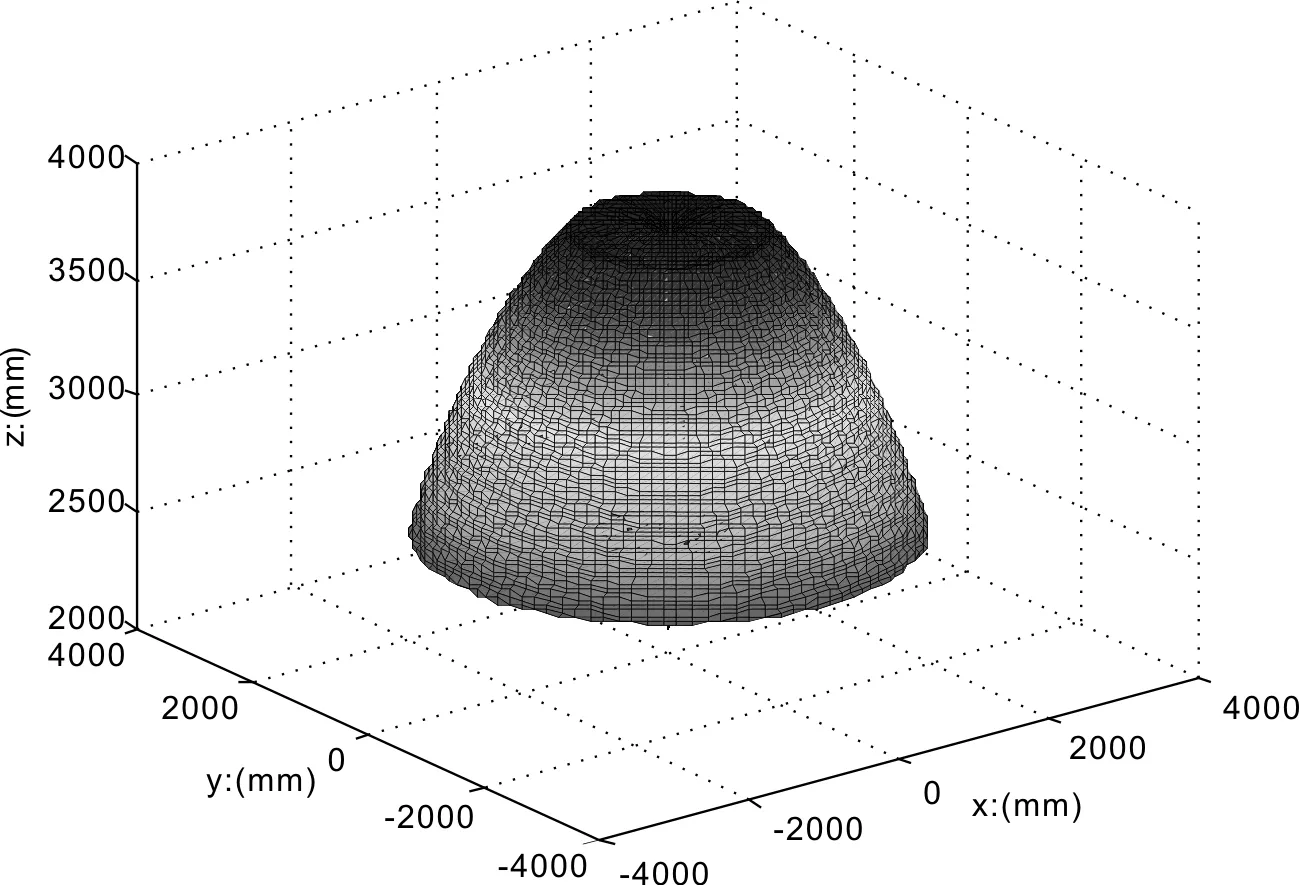
图8和图9分别是某型6-RSPS模拟器平台水平位姿和任意位姿工作空间的三维仿真图。
为与文献[9]提供的6-SPS机构平台的算法比较,将2个平台机构的参数设置相同,6-RSPS平台的工作空间大很多,且更有规律,截面更有形状。从图8及图9中可看出,6-RSPS机构没有结构奇异点,不存在工作空间内部达不到的点,这与6-SPS相比有更大的优势。
3 结束语
本设计的可连续转弯的6-RSPS驾驶模拟器平台机构经试验验证,具有以下优点:
1)可以围绕Z轴无限旋转,避免了围绕Z轴旋转方向的洗出滤波算法,从而有效地提高模拟的真实性。
2)有效地提高了X、Y、Z3个方向,特别Z方向上的行程。
3)增加了驾驶模拟器平台的工作空间。
[1] Freeman,JS.The Iowa driving simulator:a tool for human factors and vehicle virtual prototyping research[J].Heavy Vehicle Systems,1994,1(2):223-230.
[2] Grant PR,Reid LD.Motion washout filter tuning:Rules and requirements[J].Journal of Aircraft,1997,34(2):142-151.
[3] 谢艳平.具有360度回转功能的六自由度运动平台的优化设计[D].武汉:华中科技大学,2008.
[4] Yun DS,Choi JH,Lee GY,et al.The concept for the integration of tele-operated unmanned vehicle and driving simulator[C].2001 IEEE International Symposium on Industrial Electronics Proceedings,Pusan Korea,2001:1419-1424.
[5] Bellmann T.An innovative driving simulator:robocoaster[C].32nd FISITA World Automotive Congress 2008,Munich Germany,2008:568-575.
[6] Xu P.A technique for developing a high accuracy durability test for a light truck on a six degree-of-freedom road test simulator[J].International Journal of Vehicle Design,2008,47(1-4):290-304.
[7] Wu PL,Liao CS,Chieng WH.Optimization setting of dynamics parameters for an ATV simulator[J].International Journal of Robotics and Automation,2011,26(4):401-418.
[8] 黎建军,魏燕定,周晓军.可无限旋转的6-RSPS模拟器平台位置反解[J].振动与冲击,2013,32(14):159-163.
[9] 邬昌峰.6-SPS并联机器人工作空间研究及其优化设计[D].合肥:合肥工业大学, 2003.
(责任编辑 吴鸿霞)
Mechanism Design of 6-RSPS Driving Simulator Platform for Continuous Turning
LiJianjun1,YangChunjie2*,YinNiandong2,HeBin2
(1College of Mechanical and Electrical Engineering,China Jiliang University,Hangzhou Zhejiang 310018;2School of Mechanical and Electronic Engineering,Hubei Polytechnic University,Huangshi Hubei 435003)
Aiming at the defects that the classical Stewart simulation driver platform fails in simulating the vehicles' large-angle turning,the 6-RSPS driving simulator platform mechanism was designed to realize the continuous turnings and the workplace was simulated.The platform can realize the infinite rotation aroundZaxis effectively improving the stroke ofX,Y,Zthree directions,increase the working space of the driving simulator platform,correspondingly improving the authenticity of the simulation.
driving simulator;6-RSPS;continuous turning;mechanism design;working space
2016-08-20
湖北省自然科学基金项目(项目编号:2014CFB177)。
黎建军,讲师,博士,研究方向:虚拟设计与制造。
10.3969/j.issn.2095-4565.2016.05.002
TH113.2
A
2095-4565(2016)05-0004-04
*通讯作者:杨春杰,副教授,硕士,研究方向:虚拟设计与制造。