基于双PID控制的温度控制系统的设计与实现*
2016-11-21薛霖霖郑都民王如刚
袁 鑫,薛霖霖,郑都民,王如刚,*,赵 力
(1.盐城工学院信息工程学院,江苏盐城224051;2.东南大学信息科学与工程学院,南京210096)
基于双PID控制的温度控制系统的设计与实现*
袁鑫1,薛霖霖1,郑都民1,王如刚1,2*,赵力2
(1.盐城工学院信息工程学院,江苏盐城224051;2.东南大学信息科学与工程学院,南京210096)
为了使半导体激光器能够快速地达到稳定工作状态,提出并实验验证了一种串联双PID控制的高精度热电制冷器(TEC)温度控制系统,该控制系统的控制芯片采用飞思卡尔MC9S12XS128MAL单片机,通过负温度系数热敏电阻进行温度信息的采集,驱动电路采用BTN7971芯片驱动TEC工作,在软件编程上,通过采用串联PID算法,利用闭环负反馈结构实现温度的稳定控制。在实验中,当温度从26.6℃上升到目标温度40℃时,建立稳态的时间为40 s,超调量为0.1%,当温度从26℃下降到10℃时,建立稳态的时间为50 s,与常规PID控制系统相比,该系统具有更好的动态性能。
温度控制;热电制冷器;PID控制;自调整;PWM控制
随着信息技术的迅速发展,使得半导体激光器已经广泛地应用于光纤通信、光纤传感和激光雷达等领域。由于激光器的输出波长随着器件温度的升高逐渐向长波长方向漂移,同时,在高度集成化的器件结构中,过高的温度将会降低元器件的性能,甚至烧毁元器件,在很大程度上降低了电子器件的稳定性和可靠性[1-2]。因此,必需对半导体激光器或系统采用合适的温度控制技术,从而保证半导体激光器或系统能够正常工作。为此,研究人员在半导体激光器的温度控制系统方面做了大量的研究工作,主要是利用DSP或者单片机等处理器进行温度控制系统的设计,获得了一定的进展[3-8]。例如,夏金宝[8]等研究人员利用MSP430单片机进行温度控制系统的设计,实现了0.2℃的控制精度。为了进一步提高温度控制系统性能,相关学者针对温度控制系统提出了多种控制算法[9-11],戴俊珂[9]等人提出了自整定模糊PID算法的LD温度控制系统,杨智[10]等学者采用模糊PID控制的方法应用于试验箱,相对常规PID控制,该算法具有更快的响应速度以及更小的超调,冯晨纯[11]等人利用模糊PID算法,仿真了粘度仪恒温系统,仿真结果显示积分分离PD和模糊自适应PID相结合的复合算法具有较小的超调量,这些研究对温度控制系统的发展取得了较大的进步。
实现离子数反转是激光产生的必要条件,在实现该条件时,需要利用外部的高能量注入,这样就需要对激光增益介质进行精密的温度控制,此外,随着温度的变化,激光器输出波长也将随之变化。因此,为了使半导体激光器能够快速的达到稳定工作状态,降低温度的稳态时间,提出并实验验证了一种串联双PID控制的高精度热电制冷器(TEC)温度控制系统。该控制系统的控制芯片采用飞思卡尔MC9S12XS128MAL单片机,通过负温度系数热敏电阻进行温度信息的采集,驱动电路采用BTN7971芯片驱动TEC工作,在软件编程上,通过采用串联PID算法,利用闭环负反馈结构实现温度的稳定控制。
1 系统构成
1.1控制单元设计
温度控制系统的结构主要由单片机、液晶显示器、键盘输入、热电制冷器(TEC)芯片、TEC驱动电路、温度传感器电路及其驱动电路和A/D转换器等构成,系统结构如图1所示。
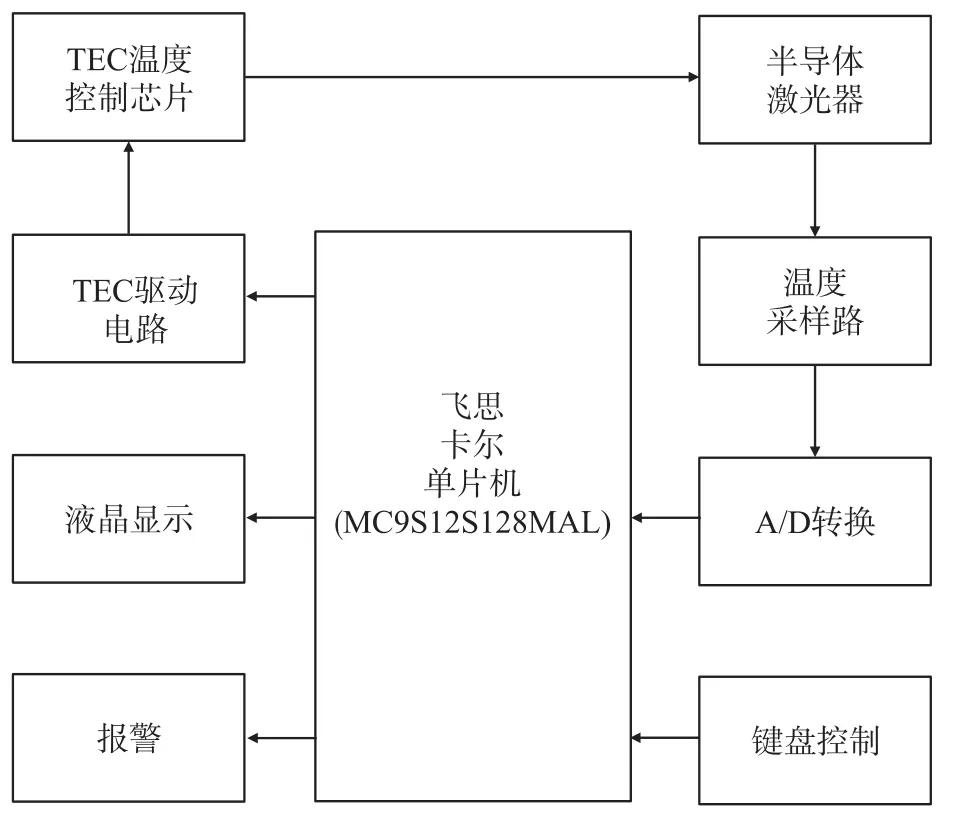
图1 系统原理结构图
系统核心处理单元采用飞思卡尔公司16 bit控制器MC9S12XS128MAL,该芯片具有16 bit S12CPU、CPU总线频率是40 MHz,可以超频到64 MHz,全功率模式下单电源供电范围3.15 V~5.00 V,可设置8 bit、10 bit和12 bit ADC,具有高性能的12 bit AD转换器。微控制器通过AD模数转化器采集激光器的温度,并利用PID控制算法,自动调节制冷片的TEC电压值和PWM脉冲。为了实现系统的温度控制和响应时间最小值,并保证系统在稳定后所消耗的电功率最少,系统采用微控制器I/O端口调节电压和定时器实现PWM脉冲输出相结合的方式。且该控制器芯片的PWM调制波有8个输出通道,每一个输出通道都可以独立的进行输出,都有一个精确的计数器,每一个PWM输出通道都能调制出占空比从0~100%变化的波形。电压调节控制制冷片最大输出工作电压,PWM脉冲的宽度控制TEC的加热或制冷时间,驱动电路的电流流向控制着TEC工作方式。
1.2温度采样模块
以温度作为反馈量的闭环温度控制系统,测温元件的灵敏度和分辨率对系统起着至关重要的作用。热敏电阻依照其电阻值随温度变化的情况,主要分为负温度系数NTC(Negative Temperature Coefficient)热敏电阻和正温度系数PTC(Positive Temperature Coefficient)热敏电阻[12]。PTC的电阻值可以随温度的上升而增大,由于其温度系数非常大,主要应用于消磁电路、加热器、电路保护和温度补偿电路,NTC的电阻值可以随温度的上升而下降,可以检测微小的温度变化,因此被广泛的应用于温度的检测电路、电路软启动、控制与补偿电路。此外,NTC还具有电阻温度系数大,灵敏度高,电阻率高,热惯性小等优点。因此,选择NTC作为温度控制系统的温度传感器。NTC热敏电阻阻值与温度变化的关系式为[8]:

其中RT为在规定温度T时的NTC热敏电阻阻值,RN为在额定温度TN时的NTC热敏电阻阻值,B为NTC热敏电阻的材料系数,RN通常用额定零功率电阻值R25表示,额定零功率电阻值是NTC热敏电阻在基准温度25℃时测得的电阻值,这个电阻值就是NTC热敏电子的标称电阻值。NTC实测电阻值与温度的关系如表1所示。
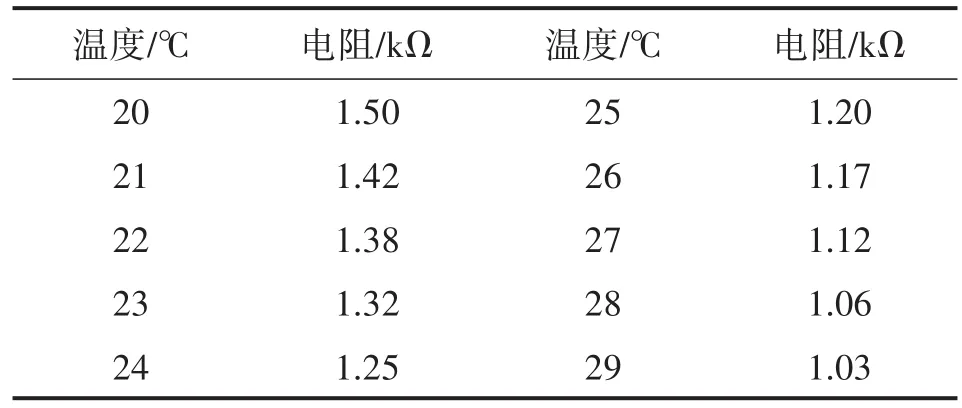
表1 热敏电阻实测温度值
根据式(1)和表1可以计算出NTC热敏电阻的材料系数B的值为3 900 K。由于传感器直接输出的模拟量幅度一般较低,同时为了更好地提高系统的抗干扰能力,在温度传感器的后端对信号进行放大,放大电路采用的是由OPA842组成的放大电路完成放大,经过放大后输出给AD转换器,其具体温度采样电路如图2所示。在温度采样电路中,10 kΩ的NTC热敏电阻与10kΩ电阻串联在高精度2.5 V电压源与地之间,通过分压间接得到NTC阻值。A/D芯片是16 bit模数转换芯片LTC1859,采用5 V电压工作模式。

图2 温度采集电路
1.3驱动电路模块
驱动电路模块是温控系统的核心模块,为保证高精度地控制温度,温控执行元件必须容易控制,而且为了与LD封装在一起,还需温控执行元件具有结构简单、体积小等特点。因此,选择半导体致冷器(TEC)作为温控执行元件。TEC是利用帕尔帖效应的装置,通过控制TEC电流的方向可以控制其吸热还是放热,但是TEC的电流一旦超过某值,就只是发热而不再制冷,因此应避免这种情况的发生。若TEC过压、过流,容易造成激光器损坏。只有集成了控制电路和保护功能的专用芯片才能完成精确温度控制的任务,因此该系统选用了BTN7971用于控制TEC的芯片。BTN7971是应用于电机驱动的大电流、半桥高集成芯片,它带有一个P沟道的高边MOSFET、一个N沟道的低边MOSFET和一个驱动IC。P沟道高边开关省去了电荷泵的需求,因而减小了EMI(电磁干扰)。BTN7971集成的驱动IC具有逻辑电平输入、电流诊断、斜率调节、死区时间产生和过温、过压、欠压、过流及短路保护的功能。通态电阻典型值为16mΩ,驱动电流可达43 A。设计的驱动电路模块如图3所示。
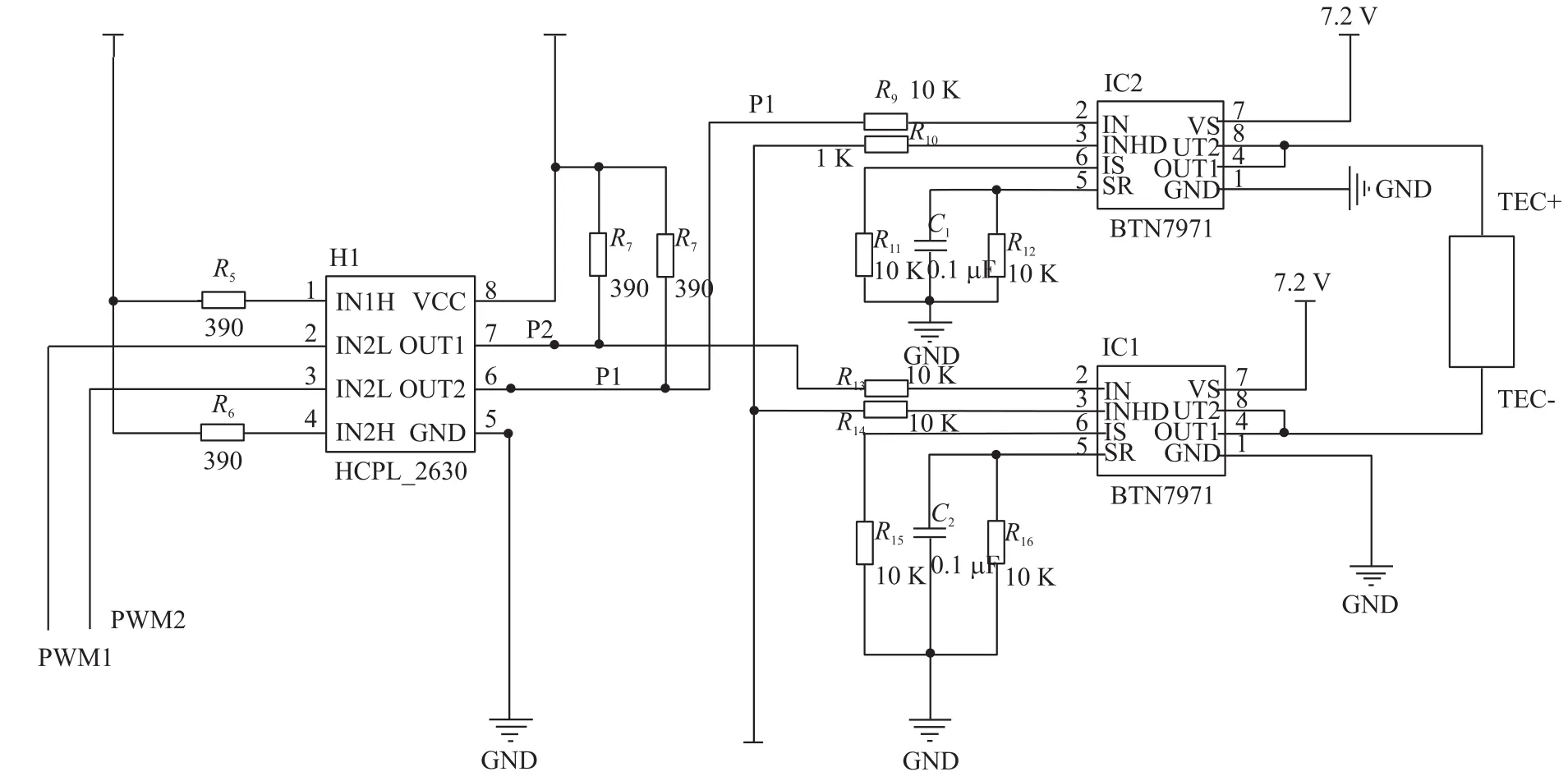
图3TEC驱动电路
该电路采用两片BTN7971构成一个全桥驱动,由于BTN7971是大电流驱动芯片,因此,在单片机控制信号的输出和BTN7971的IN端之间加入了双通道逻辑输出高速光耦HCPL-2630电路起到隔离保护的作用,防止电路出现过流、短路等故障时,大电流流入单片机使单片机损坏。从2个BTN7971输出的两个PWM波的高低电平控制TEC的加热或者制冷,当其中一个BTN7971(IC2)的PWM波电压高于另一个BTN7971(IC1)的PWM波电压时,电流从TEC+流向TEC-,同理也可提供从TEC-流向TEC+的电流,能够为TEC提供双向电流。
1.4双PID控制算法设计
PID控制算法是工程控制领域常用的一种算法,它具有结构简单、易实现、性能良好等优点,因此,在高精度温度控制系统中常采用PID控制,PID算法连续系统的表达式可以表示为[7]:

其中Kp为比例作用系数,影响系统响应速度和精度,Kp越大,系统的响应速度越快,系统的调节精度越高,但易产生超调,甚至会导致系统不稳定,Kp取值过小,则会降低系统调节精度,使系统响应速度缓慢,从而延长调节时间,使系统静态、动态特性变差;Ki为积分作用系数,影响系统稳态精度,但Ki过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调,若Ki过小,将使系统静态误差难以消除,影响系统的调节精度;Kd为微分作用系数,影响系统动态特性,其作用主要是在响应的过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报,但Kd过大会使响应过程提前制动从而延长调节时间,而且会降低系统的抗干扰性能。e(t)为设定量和实际输出量之间的偏差,由此可以看出PID算法其实是对偏差的控制过程,系统使用的微处理器只能根据采样时刻的偏差值计算输出控制量,因此,PID算法要离散化,离散后的PID算法表达式

其中k为采样序列号,T为采样时间。从式(3)可以得出增量PID算法的表达式为:

从式(4)可以看出增量PID算法控制的只是系统输出量的增量Δu(k),并且Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果。由上述分析可以看出Kp、Ki和Kd变化对系统的影响,若系统只取一组固定的Kp、Ki和Kd值,那么当偏差变化时系统则不能及时应对,因此,我们设计的PID算法的温度控制系统的结构如图4所示。

图4 双PID温度控制结构
由图4可以看出,与常规的PID温度控制器相比,该设计利用两个串联的PID控制和一个温度反馈环节,第1个PID控制器首先对反馈的温度量进行粗略调节,而通过第2个PID控制器对温度进行精细的控制,通过两次的控制可以提高系统的响应速度和系统的稳定性。对于每一个PID控制部分,设定量和实际输出量之间的偏差|| e(t)的值比较小时,为了使系统具有较好的稳定性,在Kp和Ki选取时,偏向大一点的数值;当偏差|e(t)|的值中等大小时,为了使系统超调量变得更小,Kp应取小一点的数值,在这种情况下,Kd取值的大小对系统的影响会比较大,因此,Kd的取值要适当;当偏差|e(t)|的值比较大时Kd可以取小一点的数值;当偏差较大时,为了使系统能更快地达到稳定状态,应取较大的Kp和较小的Kd,同时为了不产生较大的超调量,应对积分作用加以限制,通常取Ki=0。
2 结果与分析
当环境温度为26.6℃,设定的温度为40℃时,分别利用常规单一PID控制器和双PID控制器控制TEC,被测物体的温度与时间的关系如图5所示,为了更清晰地反映常规单一PID和双PID控制曲线的区别,将图形曲线进行了放大嵌入在图的内部。

图5 双PID和单一PID控制的温度响应曲线
从图5可以看出,双PID控制器的调节时间约为40 s,系统无超调;而常规单一PID控制在28 s时出现最大超调,超调量约为1.6℃,之后温度出现波动,到100 s时系统才趋于稳定,之后系统具有一定的误差。因此,验证了带有双PID控制的快速性和稳定性,特别适用于对超调量要求苛刻的系统。实验结果可以用表2进行表示。从图4和表2的实验结果来看,系统在升温控制方面,相对于常规的PID控制,双PID控制有较快的效应速度和更小的超调量,使温度控制系统的性能更加优越。

表2 两种算法的性能参数比较 单位:s
为了验证系统的降温性能,当环境温度为26℃,设定要控制的温度为10℃时,利用该双PID控制器控制TEC工作,被测物体的温度与时间的关系如图6所示,从图6可以看出,温差下降16℃的情况下,双PID控制器的降温调节时间约为50 s,系统无超调。从升温和降温的两个实验结果可以看出,提出的双PID温度控制系统具有较好的温度控制功能,且系统没有超调量。

图6 双PID控制的降温响应曲线
3 结论
为了使半导体激光器能够快速地达到稳定工作状态,提出并实验验证了一种串联双PID控制的高精度热电制冷器(TEC)温度控制系统,该控制系统的控制芯片采用飞思卡尔MC9S12XS128MAL单片机,通过负温度系数热敏电阻进行温度信息的采集,驱动电路采用BTN7971芯片驱动TEC工作,在软件编程上,通过采用串联PID算法,利用闭环负反馈结构实现温度的稳定控制。在实验中,当温度从26.6℃上升到目标温度40℃时,建立稳态的时间为40 s,超调量为0.1%,当温度从26℃下降到10℃时,建立稳态的时间为50 s,与常规PID控制系统相比,该系统具有更好的动态性能。
[1]廖金权.电机温度时滞耦合系统自抗扰控制仿真研究[J].电子器件,2014,37(4):759-762.
[2]高晓琴.变压器隔离式高精度陀螺仪表直流温控系统[J].电子器件,2015,38(3):643-645.
[3]余尧,王先全,朱桂林,等.基于BP神经网络自整定的PID温度控制系统的设计[J].电子器件,2015,38(6):1360-1363.
[4]宋相龙,蒋书波,袁林成.智能辊闸系统温度影响问题处理[J].电子器件,2015,38(4):764-768.
[5]吕飞,高峰,郑桥,等.基于ADN8831的温度控制系统在激光器中的应用[J].合肥工业大学学报,2011,34(7):1096-1020.
[6]左帅,和婷,尧思远.基于模糊PID控制的半导体激光器温控系统[J].激光与红外,2014,44(1):94-97.
[7]李江澜,石云波,赵鹏飞,等.TEC的高精度半导体激光器温控设计[J].红外与激光工程,2014,43(6):1745-1749.
[8]夏金宝,刘兆军,张飒飒,等.快速半导体激光器温度控制系统设计[J].红外与激光工程,2015,44(7):1991-1995.
[9]戴俊珂,姜海明,钟奇润,等.基于自整定模糊PID算法的LD温度控制系统[J].红外与激光工程,2014,43(10):3287-3291.
[10]杨智,段鹏斌.一种基于模糊控制的温度控制器设计[J].工业仪表与自动化装置,2015(7):90-93.
[11]冯晨纯,王珍,江亲瑜.基于模糊PID的粘度仪恒温系统实现[J].自动化技术与应用,2015,34(3):20-24.
[12]张克玲,钱祥忠.基于模糊控制的电动汽车再生控制系统的研究[J].电子器件,2015,38(4):876-881.

袁鑫(1994-),男,汉族,江苏泰州人,盐城工学院本科生,主要研究方向为信号检测与信息处理等,610732469@qq.com;

王如刚(1975-),男,汉族,江苏睢宁人,东南大学信息学院,博士,副教授,主要从事光电子技术方面的研究,wrg3506@ seu.edu.cn。
Design and Implementation of Temperature Control System Based on Double PID Control*
YUAN Xin1,XUE Linlin1,ZHEN Dumin1,WANG Rugang1,2*,ZHAO Li2
(1.School of Information Engineering,Yancheng Institute of Technology,Yancheng Jiangsu 224051,China;2.School of Information Science and Engineering,Southeast University,Nanjing 210096,China)
In order to enable the semiconductor laser to achieve a stable working state quickly,a high precision Thermoelectric Cooler(TEC)temperature-controlled circuit is proposed and experimentally demonstrated by using series double PID,a microcontroller of Freescale Semiconductor MC9S12XS128MAL is used in the controlled circuit,and a negative temperature coefficient thermistor is used to collect temperature information,the TEC chip is derived by the driving circuit with two BTN7971 chip to drive the TEC work,in the software programming,the stability control of the temperature is realized by using the PID algorithm and the closed loop negative feedback structure.In the experiment,when the temperature rises from 26.6℃to 40℃,the stabilized time is within 40 s,and the overshoot is about 0.1%,and when the temperature drops from 26℃to 10℃,the stabilized time is about 50 s.Compared with the conventional PID control system,the system has better dynamic performance.
temperature control;thermoelectric cooler;PID control;self-regulatory;PWM control
TP273
A
1005-9490(2016)05-1135-05
项目来源:大学生创新创业训练计划项目(2015021);江苏省产学研前瞻性项目(BY2015057-39);江苏省高校自然科学研究基金项目(14KJB510034);中国博士后科学基金资助项目(2015M571637);盐城工学院人才引进资助项目(KJC2013014)
2015-10-31修改日期:2016-01-22
EEACC:7320R10.3969/j.issn.1005-9490.2016.05.023
